
Fターム[5J070AK14]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 特定物標の識別 (195)
Fターム[5J070AK14]に分類される特許
61 - 80 / 195
衛生状態監視管理システム及び方法
個人及び会社が自身の周囲環境の衛生状態を管理及び監視するためのリアルタイムロケーション特定システム(RTLS)衛生状態監視管理システム。本発明のいくつかの実施形態では、RTLSは、部屋及び表面の清潔度並びに清掃用品及び清掃職員のロケーションを監視及び管理するのに用いられる。本発明は、衛生サービスの改善された効率性及び品質を提供する。例えば、本発明は、清掃の優先順位付けを可能にすることができ、清掃用品及び清掃職員の効率的な使用を改善することができ、短期及び長期の清掃作業を追跡することができ、有効でない清掃に対して見識を提供することができる。  (もっと読む)
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
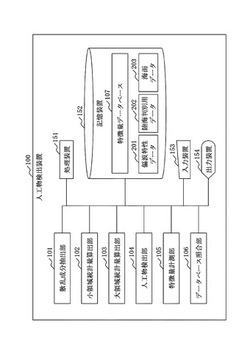
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分と体積散乱成分とヘリックス散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分と体積散乱成分とヘリックス散乱成分とのうち1種類以上の散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダ画像処理装置

【課題】移動体に搭載されたレーダで所定領域を観測し、対象物を検出する時、従来は対象物の高度情報と反射強度を用いていたので、高度と反射強度が同程度の建物や車両等は区別できない。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
(もっと読む)
三次元メモリを有する海洋レーダーシステム
【課題】航海上の標的と固定物体を自動的に識別するレーダシステムを提供する。
【解決手段】レーダーシステム10は、地理的領域を特徴づけるレーダー戻りデータを記憶装置に入れる際、操作可能であるメモリ装置20、地理的領域と関連した固定境界標識を表す一組の海図データを含むデータベース28、およびメモリ装置に結合したプロセッサ22を含む。プロセッサは、メモリ装置より少なくとも1つの地理的領域の連続スキャンに対応する複数のレーダー戻りデータセットを取得し、複数のデータセット間で相関処理を実行し、第1相関データセットを生じ、これと固定境界標識海図データ間で相関処理を実行し、第2相関データセットを生じ、第2相関データセットを処理し、固定境界標識海図データを一掃し、そこから固定境界標識ではないスキャンされた物体を表す第3データセットを生じるよう配列されている。
(もっと読む)
疑似目標除去装置および移動体自動識別装置
【目的】本発明は、目標からレーダに到来した受信波を処理し、実質的に同じ目標による重複した反射に起因して識別される複数の目標を一本化する疑似目標除去装置と、搭載された移動体の識別情報に併せて上記一本化の拠り所となる情報を無線伝送路を介して外部に通知する移動体自動識別装置とに関し、ハードウェアの構成が大幅に変更されることなく、目標の識別精度を高め、かつ安定に維持することを目的とする。
【解決手段】目標が位置する領域を識別する領域識別手段と、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段とを備える。
(もっと読む)
物体認識装置
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
鳥または飛行物体の検知方法
本発明は、少なくとも1つのレーダ(5)の形式の、少なくとも1羽の鳥または別の飛行物体の電波を検出する手段を使用し、各レーダ(5)からのアナログ画像をデジタル画像に変換し、外側安全領域(7)と内側安全領域(8)を前記画像に適用してレーダ(5)毎に安全空間を生成し、次に、安全領域(7、8)内で検出があった場合に措置をとることにより、単一の風力タービン(1)に対する鳥または物体の飛行レベルを検出する方法に関する。 (もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
障害物検出および警告のためのシステムおよび方法
【課題】すべての潜在的に危険な障害物を適切に検出できる障害物検出システムを提供する。
【解決手段】障害物検出システム100は、無線周波数(RF)信号を放射するように動作可能な送信アンテナ112と、そのアンテナからのRF信号の送信を制御するように動作可能な送信器102とを備える。この障害物検出システムはまた、RF信号の反射を受信するように動作可能な受信アンテナ110と、障害物、およびその障害物の1つまたは複数の物理的属性を識別するために、受信された反射のレーダ断面積RCSの複数の特性を解析するように動作可能な処理回路106とを備える。送信器は、前記送信アンテナを介した周波数変調連続波(FMCW)無線周波数信号の送信を制御するように動作可能である。送信アンテナは、非ポラリメトリックRF信号を送信するように動作可能である。
(もっと読む)
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
(もっと読む)
物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラム
【課題】レーダから放射される電波に対する反射率が著しく小さいステルス性を有する飛行物体などを検出する物体検出システムを提供する。
【解決手段】レーダ(たとえば、合成開口レーダ11)により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回(たとえば、2回)ずつ逐次観測される。そして、物体検出手段(たとえば、電子計算機12)で、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体(たとえば、飛行物体P1,P2)が空中に存在することが検出される。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部22で車両判定を行った場合に、当該車両の周囲において、カメラ1の処理部12で白線認識を行い、認識した白線の画像特徴量(彩度、色相)を抽出する。さらに、処理部12は、画像全体において、車両周囲で抽出した白線の画像特徴量に一致する画像特徴量を有する位置を検出することにより、画像内のどの位置に白線が有るかを検出する。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部12は、処理部22で白線を検出した場合に、当該白線の画像特徴量(彩度、色相)を算出する。さらに、処理部12は、画像全体において、算出した白線の画像特徴量に一致する画像特徴量を有する位置を検出する。そして、レーザレーダ装置2の処理部22で検出した白線の位置における画像とカメラで抽出した遠方の白線の画像とを合成する。
(もっと読む)
車両探索装置および車両探索方法
【課題】装置構成を簡略化し、かつ、発信源の方向の検知精度を向上させる。
【解決手段】車両探索装置10は、トリガー信号を発信可能な携帯端末11と、トリガー信号に対する応答信号を所定時間に亘って所定パターンで発信する車載装置12とを備え、携帯端末11は、応答信号の所定反射体(操作者の人体)での反射波を所定相対位置(操作者の所定正面位置)で受信するアンテナ21aと、反射波の受信強度および受信パターンを検出する受信強度検出部23と、応答信号の車両側識別情報と所定の端末側識別情報とを比較する識別情報比較部25と、車両側識別情報が端末側識別情報と一致した場合に、所定反射体の異なる配置方向毎での受信強度を操作者に報知する報知制御部28とを備える。
(もっと読む)
物体検出装置
【課題】路面かあるいは路面上の物体かを高精度に判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、検出対象の物体の候補までの距離を検出する距離検出手段10,21と、自車両の移動量を取得する移動量取得手段11,21と、距離検出手段10,21によって複数の時刻でそれぞれ検出された物体の候補までの各距離と移動量取得手段11,21によって複数の時刻でそれぞれ取得された自車両の各移動量に基づいて、当該物体の候補が路面か又は路面上の物体かを判定する判定手段21とを備えることを特徴とする。
(もっと読む)
車両周辺監視装置
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
物体検出装置
【課題】停止車両を、路面標示や路面に埋め込まれた反射物等の路面設置物と、区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、水平方向、および垂直方向にレーザ光を走査し、自車両前方に存在する物体を検出する。また、制御部2は、検出物体について、(a)停止物体である、(b)自車両からの距離が予め定めた路面設置物判定距離D1よりも短い、(c)前回の下走査で得られた反射波の強度が、前回の上走査で得られた反射波の強度の路面設置物判定係数倍(×α1)よりも大きい、および、(d)前回の下走査で得られた反射波の強度が、今回の基準走査で得られた反射波の強度よりも大きい、という、4つの条件が全て成立したときに、その検出物体を自車両の走行を妨げない路面設置物であると判定する。
(もっと読む)
画像処理装置
【課題】地表面に生じた物理的な変化をより高精度に抽出する画像処理装置を提供する。
【解決手段】取得時間の異なる同一領域を観測した複数枚のレーダ画像を格納するデータ格納手段(1)と、複数枚のレーダ画像からそれぞれ2枚のレーダ画像を選択して複素相関を算出し複素相関の分布を示すコヒーレンスマップを算出するコヒーレント算出処理手段(2)と、得られたコヒーレンスマップから各コヒーレンスマップ上の注目画素に関する閾値を算出する閾値算出処理手段(110a)と、算出されたコヒーレンスマップと閾値をもとにコヒーレンスの変化領域を抽出する閾値処理手段(200a)と、を備えた。
(もっと読む)
航空機および海上乗物用の地上衝突計器
【課題】レーダエコー処理システムおよび方法を提供すること。
【解決手段】装備乗物(122)が対象となる表面領域の近傍で動作中であるときに、レーダエコー処理システムおよび方法がレーダ情報を処理するように動作可能である。典型的な実施形態が、レーダシステム(410)から放射される出力パルスのエネルギーを低減し、レーダシステム(410)から放射される低減されたエネルギー出力パルスを反射する複数の物体からの複数のレーダエコーを受信し、装備乗物(122)の少なくとも現在の位置に基づいて対象となる表面領域を求め、かつ対象となる表面領域の外側に位置する物体によって生成されたレーダエコーをフィルタで除去する。随意選択的に、幾つかのシステムおよび方法は、低減されたエネルギー出力パルスが放射されるアンテナの掃引範囲を狭めることができる。
(もっと読む)
レーダー装置
【課題】後段に接続されるシステムにとって不要な対象物と必要な対象物とを確実に判断することのできるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物毎の相対速度、相対距離及び上下角度を測定し、相対距離が予め定めた距離閾値以下、且つ、相対速度が予め定めた速度閾値以下である対象物の上下角度を目標上下角度として設定する。そして、設定した目標上下角度と測定範囲内に存在する対象物の上下角度との相関値が基準値以下である対象物を必要対象物と判断し、当該相関値が基準値を越える対象物を不要対象物として判断する。
(もっと読む)
61 - 80 / 195
[ Back to top ]