
Fターム[5J070AK14]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 特定物標の識別 (195)
Fターム[5J070AK14]に分類される特許
141 - 160 / 195
二次監視レーダ
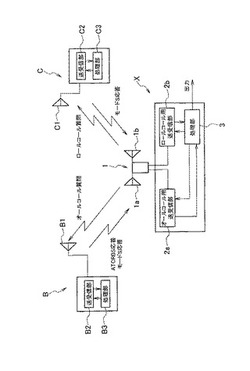
【課題】本発明は、監視対象航空機数を増加可能な二次監視レーダを提供する。
【解決手段】回転する空中線1をバックツーバック(Back to Back)方式のアンテナ1a,1bで構成し、一方のアンテナ1aには、一括質問応答を担うオールコール用送受信部2aを接続し、他方のアンテナ1bにはモードSの個別の質問応答を担うロールコール用送受信部2bを接続構成する。
上記構成により、同一ビームドエルタイムT内で互いに180度異なる方位に、オールコールの送受信及びロールコールの送受信を行うことができるので、監視対象の航空機数を大幅に増大できる。
(もっと読む)
RFIDタグ感知システム及び感知用発光タグ

【課題】選択されたRFIDタグを目視で感知することが可能なRFIDタグ感知システム及び感知用発光タグの提供。
【解決手段】RFIDタグ感知システムSは、RFIDタグ1とリーダ/ライタ2と感知用発光タグ3とから構成される。感知用発光タグ3の発光タグ用アンテナ30がRFIDタグ用アンテナ10との電磁結合で自タグの選択可の信号を受け取る。タグ選択感知手段が受け取った自タグの選択可の信号によりRFIDタグ1がリーダ/ライタ2により選択されたことを検知する。受光手段がリーダ/ライタ2から照射された光を受光する。光−電気変換手段が受光した光を電気エネルギーに変換する。RFIDタグ1が自タグの選択可の信号を送信したとき、発光手段を電気エネルギーを用いて発光させることができる。
(もっと読む)
レーダ受信パルス分離装置
【課題】 複数の目標の特定のPRI(パルス繰返し周期:Pulse Repetition Interval)を有するパルス列信号が重なって受信されたとしても、このパルス列信号の中から、所望のPRIを有するパルス列信号だけを選択抽出して、このパルス列信号に基づいてスピーカを鳴らすことが可能なレーダ受信パルス分離装置を提供する。
【解決手段】 複数の目標のレーダ装置から送信されたパルス列信号を受信回路1で受信し、A/D変換器2でデジタル化した後、デジタルPRI検知選択部3がデジタル化された第1のデジタルパルス列信号の中から所望の目標のPRIを有する第2のデジタルパルス列信号を選択出力し、スピーカ駆動回路4がスピーカ5を鳴らすためにパルス拡張を行うようにした。
(もっと読む)
マイクロ波撮像システム及びマイクロ波による撮像方法
【課題】
離れた領域内の、禁制品等の対象物を識別するのに十分な解像度で離れたところのマイクロ波撮像を実行することが可能なマイクロ波撮像システム及びマイクロ波による撮像方法を提供。
【解決手段】
複数のアンテナ素子を含むアンテナアレイが、離れた領域を含む容積部分内のターゲットにマイクロ波照射が向かうようにそれぞれの方向係数がプログラム可能にされ、ターゲットから反射された反射マイクロ波照射を受信するようにそれぞれの方向係数が更にプログラム可能にされている。プロセッサは、反射マイクロ波照射の強度を測定し、容積部分のマイクロ波画像内のボクセルの値を求める。そして、離れた領域内の対象物を識別するのに十分な解像度でマイクロ波画像を作成する。
(もっと読む)
地中レーダ画像処理法
【課題】 管路等の人工物を地中レーダなどにより探査した場合の画像を処理して測定現場で目的の人工物を容易に判定できる効率的な処理法を提供する。
【解決手段】 各測定位置における受信信号をデコンボリューション等により処理して反射信号の遅延時間を推定し、推定された遅延時間と測定位置の差が所定の範囲内にあるものを同じグループに帰属させることにより推定遅延時間をグループ化し、グループごとに同一グループの画素の中で最も遅延時間が短い位置の近傍に反射点があると仮定して、同グループの画素による反射点の推定を行い、推定された反射点に同グループに属する遅延時間の評価値と推定誤差によって決まる評価値を与え、近距離にある推定位置を統合することにより、同一対象物による可能性が高い推定位置を統合して、推定位置の確度を高める。
(もっと読む)
レーダ装置
【課題】広角2次元監視をおこなうモノパルス方式のレーダを用いて、物体の種別を精度よく判定しうる安価な監視レーダ装置を提供する。
【解決手段】角度計測にモノパルス方式を採用したレーダ装置を用いて、監視領域内を移動する物体上の複数の箇所における反射波を受信し、各反射波について反射箇所を計測する。そして、計測データに基づき、移動物体の位置と監視レーダ装置の測角方向における大きさを算出する。
(もっと読む)
通信機能を有する車載レーダー装置
【課題】UWBレーダーを車載に適用した場合、最適な制御方法,実装方法を検討する必要がある。
【解決手段】本発明は、通信機能、及び、レーダー機能を有するUWBを用いる。前方の障害物車両をレーダー機能で車間距離を測定し、その距離に応じてドライバーに危険警告を発する、もしくは、プリクラッシュ動作を行う。また、通信機能を用いて、車両間で互いに自車位置を通知することにより、外乱に依らず自車に近接する車両との距離を測定し、その距離に応じてドライバーに危険警告を発する、もしくは、プリクラッシュ動作を行うことにより達成される。また、自車位置情報によりレーダーの使用周波数、及び送信電力を変化させて、他の無線システムとの影響を低減する。
(もっと読む)
タグを使用する物品追跡の方法およびシステム
【課題】本発明は、上述した背景からなされたものであって、本発明は、タグを使用して物品を追跡する改良された方法およびシステムを提供する。
【解決手段】本発明の態様は、物品を追跡する方法を記載する。物品は、タグ(302)に関連付けられ、タグリーダとタグとの組み合わせ(304)からの問い合わせに応答することができる。タグリーダとタグとの組み合わせは、タグリーダ(304)を使用してタグに関連付けられる物品を識別することができる。動作時、タグリーダ(312)は、タグ(300)に関連付けれられる物品の識別情報について、少なくとも1つのタグリーダとタグとの組み合わせ(308/310)に対して要求を行う。タグリーダとタグとの組み合わせ(304)は、タグに関連付けられる物品を識別し、物品およびタグ(302)の識別情報をタグリーダに提供する。
(もっと読む)
電波誘導装置
【課題】移動していない目標に対しても誘導精度を劣化させないで誘導弾を誘導できる電波誘導装置。
【解決手段】目標検出部5は、間欠的に出現する目標用の目標ゲート信号で受信機4からの信号をゲートして周波数分析する第1周波数分析器101−1と、この出力から目標を検出する第1目標検出器102−1と、常に出現する代理目標用の代理目標ゲート信号で受信機からの信号をゲートして周波数分析する第2周波数分析器101−2と、この出力から代理目標を検出する第2目標検出器102−2を備え、追随制御部6は、第1目標検出器によって目標が検出されなかった場合に、目標と代理目標との相対位置関係を計算する相対位置計算器104と、計算された相対位置関係と代理目標の位置情報とに基づき目標の位置を推定し、目標位置の推定値として出力する位置計算器105とを備える。
(もっと読む)
画像鮮明化装置、画像鮮明化方法、画像鮮明化プログラム、速度測定装置、速度測定方法、速度測定プログラム、画像鮮明度判定装置、画像鮮明度判定方法および画像鮮明度判定プログラム
【課題】 周囲に電波散乱体がある場合や、動揺(移動する)目標物の輝度が弱い場合などにおいても、SAR(Synthetic Aperture Radar、合成開口レーダ)により観測された目標物を鮮明に再生することを目的とする。
【解決手段】 SARの移動情報と目標物の予測移動情報とに基づいたSARと目標物との距離関係情報に基づき参照関数を生成する参照関数生成部142と、参照関数生成部142が生成した参照関数に基づき、レンジ圧縮後データをアジマス圧縮しアジマス圧縮後データを生成するアジマス圧縮処理部138とを備える。
(もっと読む)
位置検出無線システム
【課題】簡単な回路構成で、催事場やテーマパーク等で広範囲の中から個人を特定し、位置を検出することができる位置検出無線システムを提供する。
【解決手段】互いに無線通信可能な子機12と親機14A,15Bとを有し、子機12及び親機14A,15Bは複数台設ける。各親機14A,15Bは所定の処理を行う処理装置20に接続している。子機12は特定小電力無線回路部16と微弱電波無線回路部18の双方を備える。親機14Aは、子機12からの微弱電波信号により子機12の存在を確認する微弱電波無線回路部24を備える。親機15Bは、特定小電力無線回路部30を備え、子機12からの特定小電力無線信号を受信して子機12の位置を検知可能にする。
(もっと読む)
インプラント、体内のインプラントの位置を求める装置および方法
【課題】体内におけるインプラントの位置の特に簡単かつ正確な検出を可能にする。
【解決手段】第1の座標系に割り付けられた画像データセットであって、少なくともインプラントを含んでいる体部分の第1の画像を作成するための画像データセットを取得する撮影装置(C)と、トランスポンダへ電磁的な一次放射を送出する送信器(A1)と、一次放射によりトランスポンダから放出された二次放射を受信する受信器(A1,A2)と、二次放射に基づいて第2の座標系におけるトランスポンダの位置を求める位置検出装置(A)と、第1の座標系と第2の座標系とを相関させる相関手段(F1)と、第1の画像およびトランスポンダの位置を再現する第2の画像を作成する画像作成手段(F3)とが設けられている。
(もっと読む)
合成開口レーダ画像表示装置
【課題】 本発明は、SAR画像中における移動目標の視認性を向上させる。
【解決手段】 移動目標信号を抽出して出力するMTI帯域制限部4で抽出された移動目標信号を予め設定された閾値レベルLを超えた信号成分を出力する検出部10を有する。
検出部10は、閾値レベルLとの比較により、クラッタ等の雑音成分や固定目標の消え残りを除去して移動目標信号を検出するとともに、検出した移動目標を必要に応じて増幅出力するように構成したので、固定目標とは明瞭に区別して表示された表示器上で、移動目標の位置や形状等を正確に把握することができる。
(もっと読む)
飛翔体誘導システム
【課題】 飛翔体誘導システムが、飛来する敵機をキャッチしてこれを迎撃すべくミサイル等の飛翔体を発射させるとき、飛翔体が種別の異なる敵機に対しても容易かつ適切に対応できるようにする。
【解決手段】 捜索レーダ1が空間を捜索して目標Aを検出し、判定器2がその検出した目標Aの種別を判定する。
捜索レーダ1がキャッチした目標Aに向けて飛翔体6が発射され、飛翔体6が目標Aを検知して追尾するとき、予め判定器2によって判定された目標Aの種別に対応した目標検出プログラム(A1,A2,・・・An)が選択されて飛翔体6に送信供給される。
従って、飛翔体6は、異なる種別の目標Aに対応した操舵翼66a,66bに対する目標位置情報を、その送信供給された目標検出プログラムに基づき生成できるので、格別複雑な構成を採用することなく、異なる複数種別の目標Aに対応することができる。
(もっと読む)
車両用物標判定装置
【課題】 人体露出物標の検出精度を向上させる。
【解決手段】 レーダ装置は、車両の前方に存在し反射強度が閾値th2以下かつ閾値th3以上で距離が所定値Ds以内の弱反射物標を最大m個検出することを周期T2で繰り返すと共に、車両の前方に存在し反射強度が車両検出閾値th1より大きい強反射物標を最大n個検出することを周期T1(T2≪T1)で繰り返し、画像処理装置は、車両の前方を撮像することで得られた画像から路面エッジを除外したエッジを抽出することを繰り返す。レーダ装置から物標情報を受信すると共に画像処理装置からエッジ情報を受信し(110,112)、受信した物標情報が表す個々の弱反射物標の画像上での写像位置にエッジが存在しているか否かに基づいて、個々の弱反射物標の実体の有無を判定し、実体有りと判定する。
(もっと読む)
距離検出装置、飛翔体妨害装置
【課題】 同時に飛来する敵飛翔体までの距離を迅速に検出し、脅威度に応じた飛翔体妨害を行う。
【解決手段】 飛翔体M1,M2の探知方位情報に基づき、2台の撮像機器121,122が順次飛翔体M1,M2を共通して撮像画像の中央に捉える。各撮像機器121,122の飛翔体M1,M2を捉えた視軸の角度θ,φと、2台の撮像機器121,122間の距離Lとから、三角法により飛翔体M1,M2までの距離D1,D2 を算出する。
この距離算出は、撮像機器121,122が飛翔体M1,M2を画面中央に捉え、そのときの視軸の角度θ,φから瞬時に行うことができるので、同時飛来の複数飛翔体M1,M2に対し、レーザ光照射による脅威度に則した飛翔体妨害により、航空機の被弾を的確に回避できる。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体
【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
物体検出装置及び物体検出方法
【課題】FM−CWレーダ方式の物体検出装置において、静止物体を検出する。
【解決手段】送信手段1と、受信手段2と、移動体の速度を検出する速度検出手段10と、速度情報に基づく周波数のオフセット量を算出する周波数オフセット量算出手段5と、送信信号の周波数上昇部分における受信IF信号の周波数スペクトルに周波数オフセット量を加えて上昇オフセット周波数スペクトルを求めるとともに、送信信号の周波数下降部分における受信IF信号の周波数スペクトルから周波数オフセット量を差し引いて下降オフセット周波数スペクトルを求める周波数オフセット手段5と、上昇オフセット周波数スペクトルと下降オフセット周波数スペクトルとを加算して加算周波数スペクトルを求める加算手段6と、加算周波数スペクトルに基づいて静止物体の検出を行う静止物体検出手段7とを備える。
(もっと読む)
チャープレーダ装置
【課題】 本発明は、多くの車両から同時にチャープ波形のレーダ電波が発射されるような状況で目標物の誤検出を防止できるチャープレーダ装置を提供することを目的とする。
【解決手段】 チャープ波形のレーダ電波を発射し目標物で反射された電波を受信して前記目標物を検出するチャープレーダ装置において、チャープ波形を出力するチャープ波形成形手段10と、装置固有のコードデータのデジタル波形を出力するデジタル波形成形手段20,80と、前記チャープ波形を前記デジタル波形で変調した合成波を出力する合成波成形手段30を有し、前記合成波成形手段の出力する合成波の電波を発射する。
(もっと読む)
141 - 160 / 195
[ Back to top ]