
Fターム[5J070AK14]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 特定物標の識別 (195)
Fターム[5J070AK14]に分類される特許
41 - 60 / 195
移動体認証システム
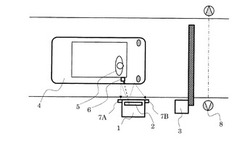
【課題】簡単な構成で信頼性の高い移動体認証システムを得る。
【解決手段】RFIDタグを認証対象とする認証装置を備えた移動体認証システムにおいて、認証装置1は、車両4の通過時に、認証装置1が車両4に向けて放射する電波で、車両4に取り付けられたRFIDタグ6を認証し、また、前記電波の移動体4での反射波で、認証装置1の近傍の非移動部に取り付けられたRFIDタグ7A及びBを認証することにより、移動体4が進入したことと、その種類を認証することができ、必要に応じて進入路のゲート3を操作する。
(もっと読む)
障害物検出装置

【課題】低コストで障害物の存在方向を検出可能な障害物検出装置を提供する。
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離、当該物体と車両との相対速度、および当該反射波の位相を検出するレーダー装置と、異なる第1の時点、および第2の時点においてレーダーによって検出された障害物が同一であるか否かを、当該第1の時点および第2の時点各々において検出された距離および相対速度に基づいて判定する同一性判定手段と、第1の時点および第2の時点において検出された障害物の存在方向を、当該第1の時点および第2の時点各々において検出された位相に基づいて算出する方向算出手段とを備える、障害物検出装置である。
(もっと読む)
目標類別装置
【課題】 類別するクラス(トラック、戦車、小型機 等)が増えるに従って類別処理が複雑化するため類別確率(類別結果が正しい確率)が低下する。
【解決手段】 目標が存在する地形の種類毎に当該地形に存在する目標の目標データを予め格納した参照データベースとを備える。目標の存在する地形に応じて、この参照データベース内の目標データを変更することで類別を行う。これにより、クラス(戦車、トラック、小型船 等)が増えても類別処理が複雑化することを避け、類別確率の低下を防ぐことができる。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
送受信装置およびイメージング装置
【課題】高精度なイメージ検出を可能にする送受信装置およびそれを使用するイメージング装置の実現。
【解決手段】周波数可変の発振信号を発生する発振器21と、発振信号から高調波を生成する高調波発生器23と、高調波から第1高周波信号を取り出す第1フィルタ24と、高調波から第2高周波信号を取り出す第2フィルタ25と、受信信号を第2高周波信号でダウンコンバートするダウンコンバート用ミキサ26と、発振信号から互いに直交する第1および第2中間周波数信号を生成するハイブリッドカプラ27と、ダウンコンバート用ミキサ26の出力と第1中間周波数信号をミキシングして第1ベースバンド信号を取り出す第1ミキサ28と、ダウンコンバート用ミキサ26の出力と第2中間周波数信号をミキシングして第2ベースバンド信号を取り出す第2ミキサ29と、を備える送受信装置。
(もっと読む)
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
(もっと読む)
位置検出装置
【課題】無線タグと位置情報との関連付けを容易化するとともに、導入時や保守時にかかる負担を軽減することが可能な位置検出装置を提供する。
【解決手段】移動経路に沿って配置され、基準位置からの配置位置の変化量に応じて順次割り当てられた番号をタグIDとして記憶する複数の無線タグと、各区間の先頭に位置する無線タグのタグIDと、当該無線タグの前記基準位置からの距離と、各区間に配置された無線タグの総数とを関連付けたテーブル情報を記憶する記憶手段と、前記移動経路を移動する移動体に設けられ、当該移動体が存在する位置に配置された前記無線タグから当該無線タグのタグIDを読み取る読取手段と、前記テーブル情報に基づいて、前記読取手段が読み取ったタグIDが所属する区間での前記無線タグの配置間隔を算出する算出手段と、前記テーブル情報と前記配置間隔とに基づいて、前記移動体の現在位置を検出する位置検出手段と、を備える。
(もっと読む)
電波到来方向推定装置および電波到来方向推定方法
【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
水稲作付け状況把握システム、水稲作付け状況把握方法、及び水稲作付け状況把握プログラム
【課題】SARにより撮影された画像に基づいて水稲作付け状況を把握する際に、湛水された圃場を決定する閾値の客観性の確保が難しい。
【解決手段】クラスター分析部60は、圃場に入水し苗を移植する田植え期と、入水前である圃場準備期及び移植した水稲が苗より生長した状態となる水稲生長期の少なくとも一方とを含む2時期又は3時期についての観測対象領域のSAR画像を取得し、観測対象領域の各点での画素値の組をサンプルとしてクラスター分析を行い5クラス以上に分類する。圃場判定部70は、観測対象領域に存在する注目圃場内のサンプルのクラス毎の個数がクラス間での大小関係に関する所定の判別式を満たすか否かに基づいて、当該注目圃場が水稲圃場であるか否かを判定する。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】失探した目標物と、新たに探知された目標物を関連付け同一目標物であることを明確にし、目標物を継続して探知できる目標物探知装置および目標物探知方法を提供する。
【解決手段】レーダ装置ごとの覆域領域と、予め決められた領域から覆域領域を除いた領域を区分した覆域外領域との隣接に関する情報と、覆域外領域間の隣接に関する情報と、レーダ装置の覆域外へ移動した目標物を最後に探知した位置と日時と覆域領域と該目標物の速度、種別を、目標物の識別子に対応付けた失探情報と、レーダ装置が新たに探知した目標物の情報と、に基づいて、該失探した目標物と新たな目標物を関連付ける目標物探知装置である。
(もっと読む)
ミリ波撮像装置およびプログラム
【課題】複数のミリ波センサを用いて被写体を撮像するミリ波撮像装置において、ミリ波センサ毎の特性のばらつきによって撮像画像が不鮮明になるのを防止する。
【解決手段】ラインセンサに被写体像を撮像させるのに先立ち、基準となるミリ波を放射するミリ波放射部からのミリ波を受信する準備段階を経て(s110〜s150)、実際に被写体像を撮像する撮像段階へと移行する(s170〜)。準備段階では、ミリ波放射部からのミリ波に基づいてミリ波センサそれぞれの検出値に対する補正値を設定しておき(s150)、撮像段階で被写体像の撮像を開始した以降は、撮像に際してミリ波センサそれぞれに検出される検出値が設定済み補正値で補正される(s190)。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
マイクロ波検出システム
【課題】 コンテンツとしての車両速度計測装置位置情報等の不正な利用を防止することができるマイクロ波検出器用ダウンロードアダプタを提供すること
【解決手段】
所定目標物または所定誤動作源からのマイクロ波を受信して警報を発生するマイクロ波検出器との間で通信を行なうとともに無線通信端末mtとの間で通信を行なう通信制御部21と、無線通信端末mtにより、サーバ30からダウンロードした所定目標物や所定誤動作源の位置情報とを一時記憶する一時記憶部23と、一時記憶部23に記憶した前記位置情報のダウンロードを制御するとともに、当該ダウンロードが終了した後に、当該ダウンロードした前記各位置情報を前記マイクロ波検出器に転送するデータ制御部22とを備える。
(もっと読む)
非接触入力処理システム、その制御方法及び制御プログラム
【課題】マウスによる動作入力を、マウスを用いずに簡易に実現可能な非接触入力処理システム、その制御方法及び制御プログラムを提供する。
【解決手段】データ処理装置130のICタグ識別情報取得手段131が、ICタグ110の識別情報を取得する。電界強度取得手段133は、ICタグ110の電界強度を識別情報に対応付けて取得する。適正座標演算手段137は、ICタグ110の識別情報と各ICタグ110の電界強度と、から3次元座標エリア上におけるICタグ110の適正座標を演算する。マウス動作識別手段138は、ICタグ110の識別情報と電界強度とその状態の維持時間と、の関係を、マウス情報登録手段135により登録された各種マウス動作情報と照合することで、マウス動作を識別する。
(もっと読む)
飛行中の航空機に使用する気象情報を補正するためのシステムおよび方法
【課題】気象を検出しそして飛行中の航空機に使用する検出された気象情報を記憶するシステムおよび方法を提供する。
【解決手段】気象情報記録システムおよび方法は、飛行中の航空機104によって検出された情報を記録するために動作可能である。関心の気象108、110の存在に対応するトリガイベントを発生し、トリガイベントの発生に応答して航空電子システム302により収集された気象情報をメモリに記憶し、記憶された気象情報を遠隔メモリにダウンロードする。トリガイベントを発生は、気象の少なくともひとつの次元を決定し、気象の少なくともひとつの次元を対応する次元の閾値と比較して、気象次元閾値を超える気象の少なくともひとつの次元に応答して気象情報を記憶しても良い。気象情報は乱気流閾値を超える検知された乱気流に次元に応答して記憶されても良い。
(もっと読む)
レーダ装置、目標同化判定処理方法およびプログラム
【課題】非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を容易に行うこと。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
(もっと読む)
物体識別装置
【課題】本発明は、物体の一部でセンサにより検出できない未検出領域を検出することで、物体の識別精度の向上を図ることができる物体識別装置を提供する。
【解決手段】本発明は、撮像カメラ2及びLRF3により検出された物体Aの特徴量に基づいて物体が識別対象物体であるか否かを判定する物体識別装置1において、物体Aの一部で撮像カメラ2及びLRF3によりにより検出できない未検出領域T4,T6を検出する未検出領域検出部15と、未検出領域検出部15の検出結果に基づいて、物体Aが識別対象物体であるか否かを判定する物体識別部16と、を備える。この物体識別装置1によれば、未検出領域が存在する場合に、この未検出領域を検出して区別することで、未検出領域において検出される特徴量すなわち遮蔽物等の特徴量を該物体の特徴量と誤認識することを回避し、これによって物体の識別精度を向上させることが可能となる。
(もっと読む)
41 - 60 / 195
[ Back to top ]