
Fターム[5J070BC13]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 質間信号及び応答信号 (481) | →コ−ド化信号と←コ−ド化信号 (146)
Fターム[5J070BC13]に分類される特許
41 - 60 / 146
識別システム

【課題】呼掛け時に複数のトランスポンダを識別する。
【解決手段】呼掛け信号を複数のトランスポンダ1、2、3へ送出すると共に、トランスポンダ1、2、3から応答信号をリーダ10において受取る。各トランスポンダ1、2、3は、待ち期間中の任意の時点に応答信号を送出すると共に、呼掛けプロセス中に待ち期間の最大長を変更する。
(もっと読む)
列車位置検知システムおよび移動無線機

【課題】 列車に搭載された移動無線機と予め定められた位置に設置された固定無線機との間の無線通信を通じて列車の在線位置を検知する際に、マルチパスフェージングなどの影響を抑制し、列車の在線位置を高精度に検知できる列車位置検知システムを提供する。
【解決手段】 移動無線機1の在線位置と固定無線機10の設置位置との位置関係に基づき角度制御信号を生成し、該角度制御信号に基づき、振幅・位相調整部4において入力信号の振幅および位相を調整して、移動無線機1のアンテナ2のビーム方向が固定無線機10の設置方向に向くように制御する。
(もっと読む)
双方向測距のための方法および装置
本明細書で開示される主題は、第1のモバイルデバイスから第1のメッセージを無線で受信するためのシステムおよび方法に関する。処理遅延を測定することができる。第1のメッセージの受信を通知する送達確認メッセージを生成することができる。処理遅延の測定値は、例えば、ブロードキャストパケットに収めてブロードキャストすることができ、または処理遅延の測定値を求める要求を有する第2のメッセージの受信に応答して、処理遅延を含む後のメッセージを送信することによってブロードキャストすることができる。  (もっと読む)
(もっと読む)
距離測定装置
【課題】無線信号の送受信によって対象物までの距離を求める距離測定装置において、距離測定精度を向上させることを目的とする。
【解決手段】距離測定装置10は、距離測定対象の無線タグとの間の予備的な無線信号送受信により、その無線タグから送信される直接波信号およびマルチパス信号の各到来方向を推定する。そして、直接波信号の到来方向にアレイアンテナの指向性最大方向が向けられ、マルチパス信号の到来方向にアレイアンテナの指向性ヌル方向が向けられるようアレイアンテナの指向特性を制御する。距離測定装置10は、指向特性制御されたアレイアンテナを介して無線信号の送受信を行い、無線タグまでの距離を測定する。
(もっと読む)
無線タグセット、無線タグおよび距離測定装置
【課題】無線タグ距離測定システムにおいて、より多くの無線タグを識別するための手段を確保すること、および複数の無線タグからそれぞれ送信される応答信号の干渉を回避することを目的とする。
【解決手段】無線タグ距離測定装置10は、距離測定対象の無線タグの固有割り当てPN符号に基づいて拡散パルス変調信号を生成し送信する。拡散パルス変調信号の生成に用いられたPN符号と自らの固有割り当てPN符号とが一致する無線タグは、受信した拡散パルス変調信号に対して時間圧縮処理を施した圧縮パルス変調信号を送信する。各無線タグには、拡散パルス変調信号を受信してから、圧縮パルス変調信号を送信するまでの内部遅延時間が設定される。無線タグ距離測定システムでは、同一の固有割り当てPN符号を有する無線タググループに所属する無線タグに、互いに異なる内部遅延時間が設定される。
(もっと読む)
RFIDタグリーダライタシステム、RFIDタグリーダライタ装置、及び、RFIDタグ
【課題】 RFIDタグリーダライタ装置から所定距離にあるRFIDタグとのみ通信できるRFIDタグリーダライタシステムを提供することにある。
【解決手段】 RFIDタグリーダライタ装置10は、出力電力と応答対応距離とに関する情報を送信し(S12)、RFIDタグ80は、受信電力のレベルに基づき、応答距離の範囲内か否かを判断し(S26)、応答距離の範囲内のときに(S26:Yes)、RFIDタグリーダライタ装置に対して応答する(S28)。このため、RFIDタグリーダライタ装置から所定距離にあるRFIDタグとのみ通信できる。
(もっと読む)
ゲート管理システム
【課題】省電力と通信品質を確保したゲート管理システムを提供する。
【解決手段】社員が所持する無線携帯機50が認証されたときに内蔵するモーター等の駆
動装置によりゲート4を開放するゲート装置3と、ゲート4の近傍に配置され、社員1、
2がゲート4の近傍に進入したことを検知してトリガ信号を発生するマット(トリガ信号
発生手段)48と、トリガ信号により起動してゲート4の近傍に送信電波を放射すると共
に、送信電波により起動された無線携帯機50から発信される電波を受信して管理情報に
基づいた認証判定及びゲート4の開閉制御を行なうゲート無線局51と、を備えて構成さ
れている。
(もっと読む)
車両検索システム
【課題】車両の方向の情報と共に該情報の信頼性の情報が表示され、高い信頼性の下で車両の方向を検索できる車両検索システムを提供する。
【解決手段】車両検索システム1は、携帯機2から観た絶対方位を検出する電子コンパス22と、車両3から観た携帯機の相対方向を検出すると共に当該車両に到来する到来電波の電波強度を測定するアレーアンテナ33a,33dと、車両3から観た絶対方位を検出する電子コンパス32と、携帯機2の相対方向の情報と車両3から観た絶対方位の情報とに基づき、車両から観た携帯機の絶対方向を演算する車両側制御部31と、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向を演算する携帯機側制御部21と、車両3の相対方向の情報を表示すると共に、電波強度の情報を所定の表現手段で表示する表示部25とを備える。
(もっと読む)
個別認識装置及び個別認識システム
【課題】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置と個別認識システムを提供する。
【解決手段】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置であって、センシング中央にセットしてセンサ周囲の環境形状を測定するレーザーレンジファインダと、各物体に貼付されたICタグに記録された情報を蓄積したデータベースと、システム中心から各物体の距離を読み取れるICタグリーダと、レーザーレンジファインダで得た環境形状変化と、ICタグリーダで得たICタグ情報と、システム中心から前記各物体までの距離変化から、データベースに蓄積した情報を元に、各ICタグが添付された対象物情報、位置、移動ベクトルを算出し、各対象物の移動予測を行ない各対象物を認識する判別器から構成した個別認識装置及び個別認識システムである。
(もっと読む)
位置検知システム及び位置管理サーバ
【課題】サファリパーク内の動物の位置情報を自動車に乗った見学者にリアルタイムに提供する。
【解決手段】位置検知システム1は、携帯端末2、基地局3、管理サーバ4及び携帯電話5を備える。携帯端末2は、サファリパーク内の動物や自動車に着設され、携帯端末2に固有の端末IDを発信する。基地局3は、サファリパーク内の各箇所に設置され、通信可能範囲の携帯端末2から端末IDを受信し、端末ID及び自らの基地局IDを管理サーバ4に送信する。管理サーバ4は、サファリパークの管理事務所に設置され、各基地局3から端末ID及び基地局IDを収集し、サファリパーク内の動物及び自動車の位置を示す地図情報を作成し、外部から閲覧可能とする。携帯電話5は、見学者が動物や自車の位置を確認するためのものであり、管理サーバ4から地図情報を受信、表示し、見学者のアイコン選択を受けて、管理サーバ4から動物の属性データを受信、表示する。
(もっと読む)
モードSシミュレータ
【課題】信号の輻輳や重畳、フルーツ妨害が発生した場合のモードS二次監視レーダの性能を検査するための信号を生成する。
【解決手段】検査対象として想定される状況に存在する航空機の識別子、航空機の位置及び航空機の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部D2と、モードS二次監視レーダ2が航空機に送信した質問信号を入力すると、機体データから、質問信号の送信対象の位置に存在する航空機の送信信号の情報を抽出し、又は質問信号が含む識別子の航空機の送信信号の情報を抽出する応答機検索器136と、抽出した複数の送信信号の情報に基づいて生成された信号を合成して、模擬信号として生成する応答発生器137とを備える。
(もっと読む)
距離測定装置用受信機および距離測定装置
【課題】無線信号の送受信によって距離測定目標までの距離を測定する距離測定装置において、距離測定精度を高めることを目的とする。
【解決手段】アンテナで受信された信号に対しローカル信号によって直交検波処理を施す直交検波部と、マルチパス環境下を伝播し受信された無線信号から所望の信号を分離する処理を直交検波信号に対して施す分離処理部とを備え、距離測定目標までの距離を測定する装置に搭載され、分離処理部によって分離された信号に基づいて距離測定用信号を生成する距離測定装置用受信機において、ローカル信号に対し、その位相変化の極性を反転する処理を施し、逆回転ローカル信号を生成する逆回転処理部と、分離処理によって分離された信号に対し、逆回転ローカル信号によって直交変調処理を施し、距離測定用信号として出力する逆回転直交変調部と、を備えることを特徴とする。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
DME地上装置とその応答効率モニタ方法
【課題】応答効率を継続的にモニタすることの可能なDME地上装置とその応答効率モニタ方法を提供すること。
【解決手段】監視制御部30により生成された擬似質問パルスのトランスポンダ部20への転送経路途中に可変利得増幅器40を設ける。そしてこの可変利得増幅器40の利得を制御して、応答パルスレート制御の実施の如何によらず、擬似質問パルスのレベルを、質問パルスの受信レベル閾値よりも高いレベルに、常時保つようにする。
(もっと読む)
画像処理装置及び画像処理システム及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射するRFIDタグなどを利用して、合成開口レーダの再生画像から特定の位置を容易に検出し、その位置に合わせて再生画像を補正する装置を提供することを目的とする。
【解決手段】画像処理装置510は、合成開口レーダ200からのパルス波に応じてRFIDタグ300aから送信された電波と地表からの当該パルス波の反射波とを反射波データとして反射波データベース501から取得する。そして、RFIDタグ300aから電波により送信された識別子データを反射波データから取得する。また、RFIDタグ300aの識別子データに対応する設置データを位置データベース502から取得し、その設置データにより示された電子基準点400aから位置データを取得する。画像処理装置510は、反射波データに基づいて地表の画像を生成し、位置データに基づいて当該画像を補正する。
(もっと読む)
物体位置認識システムおよび方法
【課題】 リーダアンテナ51などの構成を簡単にすることができるとともに、電子タグ23の物体情報を正確に素早く読み取ることができる物体位置認識システムを提供する。
【解決手段】 アンテナ形成対象部材14に配置されることができかつ複数個の電子タグ付き位置認識対象物体11が行列状に配されることができる物体配置用ラック12を備え、アンテナ形成対称部材14に配設されているリーダアンテナ51が行方向にほぼ沿って配されている複数個の位置認識対象物体11の物体情報を各行ごとに読み取ることができる行方向読み取り用のアンテナ状態と、リーダアンテナ51が列方向にほぼ沿って配されている複数個の位置認識対象物体11の物体情報を各列ごとに読み取ることができる列方向読み取り用のアンテナ状態とが得られるように、アンテナ形成対象部材14に対する物体配置用ラック12の相対的な配置を変更し得るように構成されている。
(もっと読む)
測距通信装置
【課題】呼出機1と応答機2間を伝播する電波の伝播時間から呼出機1と応答機2間の距離を計測する測距通信装置において、無線回路の制御クロックの周期未満の精度で伝播時間を計測し高精度な距離測定を可能にする。
【解決手段】呼出機1と応答機2間を伝播する電波の伝播時間から呼出機1と応答機2間の距離を計測する測距通信装置において、応答機2は呼出機1からの呼出信号から距離測定に必要な符号信号を制御クロックの周期未満の精度で検出し再生して返信することで高精度に距離測定を行う。
(もっと読む)
変調後方散乱を用いてのタグ付き資産の所在地推定方法および所在地推定システム
資産タグと1または複数のマーカータグとから変調後方散乱を用いて、資産の所在地を決定する方法とシステム。システムは、読取機と、所在地決定モジュールと、1または複数のマーカータグとを有する。資産タグのための所在地推定は、マーカータグそれぞれの所在地の事前情報に部分的に基づき決定される。所在地決定モジュールは、1または複数のマーカータグと、資産タグとから受信した変調後方散乱信号の推定されたパラメータを用いて、資産タグの所在地推定を決定する。マーカータグの既知の所在地を用いて、資産タグの所在地推定は決定されうる。所在地推定は、相対的所在地や絶対的所在地でありえ、および/または資産タグの所在地推定は、マーカータグを有するゾーンでありうる。マーカータグを用いる可動式読取機は、広い範囲に亘って資産タグ所在地を決定でき、たとえば広い範囲に亘って資産を在庫調査しうる。 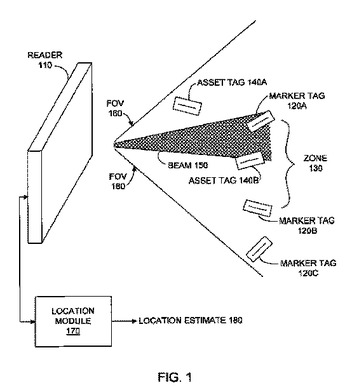 (もっと読む)
(もっと読む)
位置情報生成システム、位置情報生成装置、コンピュータプログラム及び位置情報生成方法
【課題】車両などの移動体の位置を精度よく特定することができる位置情報生成システム、該位置情報生成システムを構成する位置情報生成装置、該位置情報生成装置を実現するためのコンピュータプログラム及び位置情報生成方法を提供する。
【解決手段】車載機100は、第1の信号を路側機の第1通信部及び第2通信部へ送信し、路側機の第1通信部及び第2通信部が送信した第2の信号を受信することにより、車載機100の第1通信部からの距離L1を算出するとともに、車載機100の第2通信部からの距離L2を算出する。車載機100は、第1通信部及び第2通信部の位置を中心とした円又は球の交点を自身の位置として特定して位置情報を生成する。
(もっと読む)
受動式測距装置
【課題】地球局から静止軌道上の通信衛星に至る測距精度を得ることと、通信リソースの消費を抑えることが互いに背反して、両立が不可能である、という従来の技術での問題を解決し、通信リソースの消費なしに高精度測距を行なう。
【解決手段】通信信号を地球局から衛星に向けて送信し、その通信信号は衛星で中継された後に同じ地球局にて受信する。送信された通信信号の中間周波信号と、受信された通信信号の中間周波信号とをそれぞれサンプリングし、それぞれのデータ間に相互相関処理を施して相関関数を得、相関関数から送信信号と受信信号間の遅延時間を測る。さらに、相互相関処理では、上記データに位相回転操作を行なって相互相関関数のピークレベルを改善した後遅延時間を測る。地上の基地局と中継局間でもよい。
(もっと読む)
41 - 60 / 146
[ Back to top ]