
国際特許分類[B23P19/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498)
国際特許分類[B23P19/00]の下位に属する分類
プレスばめによる対象物結合用,またはプレスばめ取外し用 (303)
部品の組立て用,または分解用 (562)
結合する部品を整列させる
国際特許分類[B23P19/00]に分類される特許
611 - 620 / 633
部品組立装置
【課題】 積層不良の発生を防止可能とする部品組立装置を提供することである。
【解決手段】 本発明の部品組立装置は、順次挿入される複数の部品3を積層状態に保持する保持部2と、該保持部2に対し遠近自在に設けられる係止部材6とを備え、該係止部材6が保持部2に接近状態で部品3の落下を阻止することを特徴とする。
(もっと読む)
制御装置

【課題】溶接時に発生するスパッタにより誤作動することがなく、また制御の簡素化を図り得る制御装置を提供する。
【解決手段】溶接ロボット1の溶接トーチ3によりワークの姿勢変更装置5等の他の動作機器を制御し得る制御装置であって、ケーシング31の上部に形成された複数の穴部32内に溶接トーチが挿入されたことを検出し得る検出部材を設け、一端側が空気源に接続され電磁開閉弁を介して他端側に姿勢変更装置4や物品取付装置5などの動作機器に作動用空気を供給する空気供給管を複数本設け、上記各検出部材からの検出信号を入力して所定の電磁開閉弁に制御信号を出力する制御回路部を設ける。上記各検出部材を、溶接トーチの2箇所を検出し得る複数組の光センサにより構成するとともに、上記制御回路部を、各光センサからの検出信号が同時に得られた場合にだけ、所定の制御信号を出力するように構成する。
(もっと読む)
組立て工場
【課題】組立てる車両を1台づつ回転組立て台に載置し、ゆっくりこの組立て台を回転させながら車両組立てを実行する新しい工法を実施するために、この回転組立て台に周辺から部品およびモジュールを搬入するための合理的な運搬装置を提供する。
【解決手段】ホイストおよびこのホイストが走行するレールからなる装置について、回転組立て台の上空では、ホイストを懸垂するレールを回転組立て台に同期して回転できるように同期手段を設ける。
(もっと読む)
ホイール組付けロボット搬送システム
【課題】 (イ)従来搬送システムにおける、フィーダーまたはローラーコンベア搬送においてはワークに位置ずれが生じること、(ロ)各機の故障が生じたときに修理が困難であること、(ハ)各フィーダの予備品の数が多くなること、の何れか少なくとも1つを解決できるホイール組付けロボット搬送システムの提供。
【解決手段】 リム溶接部位置決めステーション11、リム溶接部ヘリウムリークテストステーション12、リムバルブ穴抜きステーション13、リムバルブ穴コインおよびリムのディスクへの仮嵌入ステーション14、リムのディスクへの本嵌入ステーション15の各ステーション間位置A、B、C、Dに汎用ロボット20を配置して、該汎用ロボット20によりステーション間のワーク30の搬送、位置決めを行うようにしたホイール組付けロボット搬送システム10。
(もっと読む)
ワーク組立装置及び組立方法
【課題】 多面に部品組付け面を有するワークに対して効率的に組付け作業を行うことができるようにし、しかも組付けスペースの省スペース化を図る。
【解決手段】 ワーク保持治具10により、部品組付け面を多面に備えたワークWを回転させて、各部品組付け面を順次上向き水平姿勢に変換させ、その上方から、部品把持装置12により組付け用部品Bを把持してボルトDを縦向きに締め付け、これを繰り返すことで、組付け作業が円滑に行われるようにし、また、組付けスペースの省スペース化を図る。  (もっと読む)
(もっと読む)
車両用フルフェイスホイールのリムディスク組付装置
車両用フルフェイスホイールのリムディスク組付装置(1)にあっては、回動装置により中心軸(X)に沿って回動する回転テーブル(20)上に配置された、ハブ孔嵌合片(28)により径方向位置を定められたディスク(72)と、該ディスク(72)上に配され、リム位置拘束手段によりリムドロップ部(78)を拘束して径方向位置が定められたリム(71)とを、リム支持片(15)によりリムフランジ部(73)を下方へ押圧しつつ、ロッド連結手段により回転テーブル(20)と連結した芯出ロッド(11)をフルフェイスホイールの中心軸(X)に沿って上方へ引張することによって、ディスク支持片(23)とリム支持片(15)とにより挟
圧して圧着状態とするものである。このリムディスク組付装置(1)により、径方向位置を高精度で定めたディスク(72)とリム(71)とを、強い挟圧力により圧着状態とすることができ、かつ、両者を安定的に回転させることができるため、熱歪みを抑制し、均一かつ正確な溶接を行うことができる。
(もっと読む)
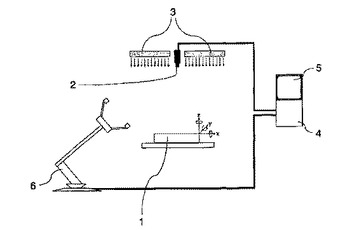
物体の3D位置の非接触式光学的測定方法及び測定装置
この発明は物体の3D位置、すなわち、ある幾何学的特性が公知の物体の3D位置及び3D配向の非接触式光学的決定のための方法及び装置に関する。前記発明の目的は単純な手段で、高測定速度、精度で、調査物体に関する完全な3D情報を調査することである。この目的のため、物体画像がカメラによって生成され、その生成画像に基づく物体の3D位置が、検出幾何学的特性に関する画像情報によって計算される。
 (もっと読む)
(もっと読む)
物品の製造装置及び物品の製造方法
【課題】物品の製造コスト及びランニングコストを低減することができる物品の製造装置を提供する。
【解決手段】物品の製造装置は、各ワーク11と対応した情報データに応じて該ワーク11を加工する。物品の製造装置は、各ワーク11を搬送するパレット1に設けられる不変の識別データを記憶したIDキャリア2から識別データを読み取るIDヘッド3と、各識別データに対応する情報データが随時記憶される記憶部5aと、IDヘッド3にて読み取られた識別データに対応した記憶部5a内の情報データに基づいてワーク11を加工するように加工アーム6を制御するPLC5とを備える。このようにすると、IDキャリア2には、不変の識別データが記憶されるのみであり、情報データを随時記憶させる必要がなくなる。
(もっと読む)
回転治具機構
【課題】 回転部材の治具取付面に対するワーク受渡しを常に円滑に行え、同種のワークが連続してもサイクルタイムを短くできるようにすること。
【解決手段】 水平な中心軸12を中心に回転する回転部材11の複数の治具取付面13a…の各々に3種類のワーク5に対応させた3種類の位置決め治具14a…を設け、回転部材11をサーボモータ21で正逆両方向に任意の回転角度で回転駆動させ、回転部材11の回転角をエンコーダ22で検出してサーボモータ21に駆動制御信号を出力し、回転部材11をブレーキ手段23を使って任意の回転位置で回転停止させる。3面の治具取付面13a…のいずれか1面をワーク受渡し位置に戻すときに最短距離で戻るように、回転部材11の回転方向を選択してサイクルタイムを短縮し、ワーク取付直後にブレーキ手段23で回転部材11の回転を拘束する。
(もっと読む)
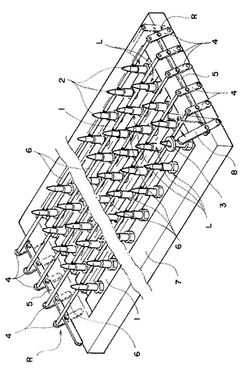
シールリングの分離装置および分離方法
【課題】 セットした多数のシールリングを1個ずつ確実に分離して供給する。
【解決手段】 周囲にコイルスプリング43を備えたメインシャフト35およびアイドルシャフト47に多数セットされたシールリング41を、メインシャフト35の回転により、コイルスプリング43に沿って移動させて、メインシャフト35と同期回転する分離ローラ59により1個ずつ分離する。このとき、シールリング41が、分離ローラ59の傾斜面71に達することで、上方にはみ出したシールリング41aを右方向に押して第1の分離作用を行い、さらに分離ローラ59の五角形部67の頂点で1個のシールリング41を下方に押して後続のシールリング41との密着をはがす第2の分離作用を行い、さらにローラ本体部65と五角形部67との境界部分で、シールリング41を傷付けることなく、1個ずつ確実に、ローラ本体部65の下に入り込ませる第3の分離作用を行う。
(もっと読む)
611 - 620 / 633
[ Back to top ]