
国際特許分類[G01C21/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361)
国際特許分類[G01C21/00]の下位に属する分類
天文学的手段によるもの (5)
地球上の手段によるもの (23)
速度または加速度の測定を使用するもの (157)
航行の計算を行う機器 (19)
宇宙航行に特に適合するもの (15)
道路網における航行に特に適合したもの (3,173)
国際特許分類[G01C21/00]に分類される特許
1,101 - 1,110 / 10,969
経路探索装置、経路探索システムおよび経路探索プログラム
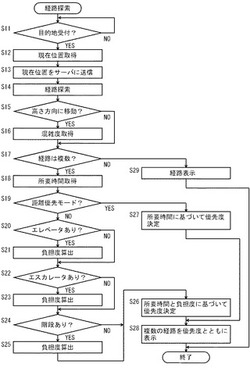
【課題】 混雑の度合いに基づいて複数の経路を評価すること。
【解決手段】 携帯情報端末は、現在位置を取得する現在位置取得部(S12)と、現在位置をサーバに送信する現在位置送信部(S13)と、現在位置から目的地までの経路を探索する経路探索部(S14)と、複数種類に分類され、種類が異なれば混雑度に対する負担度の増加割合が異なる複数の特定経路を記憶するEEPROMと、混雑度をサーバから取得する混雑度取得部61と、複数の特定経路のうち探索された経路に含まれる特定経路について、混雑度に対応する負担度を算出する負担度算出部(S21,S23,S25)と、複数の経路が探索される場合、負担度に基づいて複数の経路それぞれに対する優先度を決定する優先度決定部(S26)と、優先度に基づいて複数の経路を表示する経路表示部(S28)と、を備える。
(もっと読む)
携帯型電子機器、および携帯型電子機器の動作方法

【課題】位置情報を有する画像データを地図に関連付けて用いることが可能な技術を提供する。
【解決手段】携帯電話機1Aは、第1表示部15を有する第1筐体と、第2表示部16を有する第2筐体と、画像データと当該画像データに関連付けられた位置情報とを記憶する記憶部107と、現在位置に関する現在位置情報を取得する位置情報取得部115と、現在位置情報に基づいて現在位置を含む地図を取得する地図取得部116と、画像データの中から、現在位置を含む所定領域内の位置情報を関連付けられた画像データを検索する画像検索部117と、第1表示部および第2表示部における表示内容を制御する表示制御部113とを備え、表示制御部113は、現在位置を含む地図を第1表示部15に表示させ、画像検索部117で検索された画像データに基づく画像を第2表示部16に表示させる。
(もっと読む)
携帯型電子機器、および携帯型電子機器の動作方法
【課題】画像、および当該画像に関連する地図の視認性を向上させることが可能な技術を提供する。
【解決手段】携帯電話機1Aは、第1表示部15を有する第1筐体と、第2表示部16を有する第2筐体と、画像データと当該画像データに関連付けられた位置情報とを取得する取得手段と、現在位置に関する現在位置情報を取得する位置情報取得部115と、画像データに関連付けられた位置情報と現在位置情報とに基づいて、現在位置から画像データに関連付けられた位置情報によって示される地点までの経路を表した案内地図を生成する案内情報取得部116と、第1表示部15および第2表示部16における表示内容を制御する表示制御部113とを備え、表示制御部113は、案内地図を第1表示部に表示させ、画像データに基づく画像を第2表示部に表示させる。
(もっと読む)
経路探索方法、及びナビゲーション装置
【課題】有料道路の利用により一般道路走行に対して発生する料金と短縮できる時間による費用対効果の上でお得感の高い経路を提供する経路探索方法、及びナビゲーション装置を提供する。
【解決手段】有料道路の期待平均速度と一般道路の期待平均速度から有料道路の時間に対する料金単価を算出する有料道路対時間単価算出手段と、料金算出ルールまたは有料道路料金テーブルの少なくとも一方に基づき有料道路のリンク費用コストを算出し、リンク旅行時間からリンク時給換算コストと、燃料費を算出し、リンク費用コストとリンク時給換算コストとリンク燃料費を合成してリンク料金コストを算出する複数料金コスト加算手段とを備えて、料金コストを考慮した経路探索手段を構成する。
(もっと読む)
多点対間最短経路探索方法およびシステム
【課題】複数始点から複数終点までの最短経路問題を高速に解くための方法およびシステムを提供することである。
【解決手段】上記課題を解決するために第1の態様として、記憶手段を有するコンピュータの処理により、多点対間最短経路問題を解く方法であって、(A)前記コンピュータの記憶領域から、複数の探索開始頂点のグラフ・データSを読み込むステップと、(B)前記コンピュータの記憶領域から、複数の探索終点頂点のグラフ・データTを読み込むステップと、(C)前記グラフ・データSから k 個の頂点 s1, s2, ...skを選択するステップと、(D)前記グラフ・データSから前記 k 個の頂点を除去するステップと、(E)前記選択した k 個の頂点の各々について、前記グラフ・データTまでの最短経路長を探索し、前記記憶領域に記憶するステップと、(F)前記グラフ・データSが空になるまで、前記(C)から(E)までのステップを繰り返すステップを有する方法を提供する。
(もっと読む)
道路情報特定方法、道路情報特定装置、ナビゲーションシステム、道路情報を特定するためのコンピュータプログラム及びそのコンピュータプログラムを記録した記録媒体
【課題】一時停止の中でも、警告が真に必要な一時停止が付された交差点進入道路を特定し、当該進入道路ついての道路情報を自動的に作成する方法及びその装置を提供する。
【解決手段】一時停止情報の付された交差点への進入道路を抽出し、
交差点ごとに当該各進入道路につき、退出道路以外の道路に車輌不在のとき、他の道路(退出道路を含む)から進入する他の車輌の全進路と当該進入道路の車輌の退出進路との交差点における交差の有無を評価し、当該他の車輌の進路と当該進入道路の車輌の進路との交差が認められないとき、該進入道路を特定する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
ナビゲーション装置、経路探索サーバ、および経路探索システム
【課題】経路探索システムにおいて、経路探索サーバ(サーバ装置)から得た誘導経路を逸脱した場合に、サーバ装置から新たな誘導経路の提供を受けることなく、最新の地図データが反映された新たな誘導経路を生成する。
【解決手段】経路探索システム7のサーバ装置1は、出発地から目的地までの誘導経路を探索する誘導経路探索部130と、予め経路逸脱を想定した予備経路を探索する予備経路探索部140とを備え、誘導経路および予備経路に関する情報をナビゲーション装置2に送信する。ナビゲーション装置2は、経路逸脱を検出すると、予備経路の中から現在位置に最も近いノードで構成される予備経路を選択する。そして、ナビゲーション装置2は、現在位置から当該ノードをつなぐ補足経路を探索し、予備経路と補足経路とを合成した経路を新たな誘導経路として経路案内を継続する。
(もっと読む)
ナビゲーション装置およびナビゲーション方法
【課題】情報量の少ない2次元地図から、簡易な処理で、鳥瞰図に表示可能な3次元の歩道橋を形成する。
【解決手段】ナビゲーション装置100は、2次元平面補間点168の座標情報と連結情報とを取得する情報取得部130と、座標情報と予め設定された歩道橋厚みを示す情報および歩道橋高さを示す情報とに基づいて3次元平面補間点174を生成する3次元平面生成部132と、連結情報と予め設定された階段長さとに基づいて任意の2次元平面補間点から階段長さだけ延長した端点を2次元階段補間点182とする2次元階段生成部134と、3次元平面補間点と2次元階段補間点と歩道橋厚みを示す情報および歩道橋高さを示す情報とに基づいて3次元階段補間点186を生成する3次元階段生成部136と、3次元平面補間点および3次元階段補間点を射影変換して鳥瞰図を生成する鳥瞰図生成部140と、を備える。
(もっと読む)
情報提示装置及び情報提示方法
【課題】施設などの対象の位置を特定できる情報を提供する。
【解決手段】所定の方向を示す情報を表示する車載のロボット100と、ロボット100の情報表示を制御するロボット制御装置200とを備え、ロボット制御装置200は、車両の現在位置と基準方向を取得する機能と、車両の現在位置と基準方向と対象の位置とに基づいてその車両の乗員に提示する情報の対象を特定する機能と、特定された対象の位置を取得する機能と、対象の位置と車両の現在位置及び基準方向とに基づいて車両の基準方向に対する対象の存在方向を示す目標角度を算出する機能と、特定された対象に関連する情報を提示する際に、算出された目標角度に基づいて、対象の存在する方向を示す情報をロボット100に表示させる表示命令を生成する機能を備える。
(もっと読む)
1,101 - 1,110 / 10,969
[ Back to top ]