
国際特許分類[G01P21/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | このサブクラスの他のグループに包含される装置または器具の試験または較正 (327)
国際特許分類[G01P21/00]の下位に属する分類
速度計に関するもの (109)
国際特許分類[G01P21/00]に分類される特許
1 - 10 / 218
3軸センサの誤りを有する測定軸を特定するための方法
【課題】固定基準座標系の中の移動物体に固定されている3軸センサの、誤りを有する測定軸を特定するための方法を提供する。
【解決手段】センサCjによる第1の場の測定値の移動基準座標に対応する推定ベクトルbejを生成するステップは、第1の場および第2の場の方向を与えるセンサCj、Ciの固定基準座標系ベクトルriおよびrjのスカラー積およびベクトル積を取るステップと、移動物体に固定されている移動基準座標系において第2の場の方向を与えるベクトルbmiの測定値を求めるステップとを含んでいる。移動基準座標系においてセンサCiの測定ベクトルbmiに対するセンサCjの推定ベクトルbejの角度は、固定基準座標系のセンサCiのベクトルriに対するセンサCjのベクトルrjの角度と同一である性質を利用する。
(もっと読む)
加速度センサのゼロ点検出装置、ゼロ点検出方法、および、プログラム

【課題】加速度センサに作用する加速度がゼロとなった状態の感応軸毎の検出値を精度よく求めることを可能にする。
【解決手段】加速度検出装置は、車両が停止状態であると判定されたとき、加速度センサ111で検出された感応軸毎の検出値と、加速度センサ111の感応軸毎のゼロ点との、感応軸毎の差分から構成される合成ベクトルの大きさが、重力加速度と等しくなることを利用した方程式を最小二乗法、或いは、逐次最小二乗法を用いて解法することで、加速度センサ111の感応軸毎のゼロ点を求める。このため、求めた検出値に誤差が含まれる余地を低減することができる。よって、加速度センサ111の感応軸毎のゼロ点を精度よく求めることができる。これにより、加速度検出装置は、加速度センサ111に作用する加速度も精度よく求めることができる。
(もっと読む)
車両用の加速度センサの出力補正装置
【課題】経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行う。
【解決手段】ロングターム補正量とショートターム補正量とを合せて調停後補正量ΔGxを演算し、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxを差し引くことで0点補正後のGセンサ値Gxを演算する。ロングターム補正量については、ショートターム補正処理により、Gセンサ2の出力値に対してローパスフィルタを掛けることで長時間の0点の変化を抽出することで求める。また、ショートターム補正量については、ロングターム補正処理よりも短周期のフィルタを掛けるショートターム補正処理により求める。また、ショートターム補正量に不感帯を設け、その不感帯の範囲を超える部分を抽出し、それを最終的なショートターム補正量として、Gセンサ2の出力値の短時間の0点の変化を補正する。
(もっと読む)
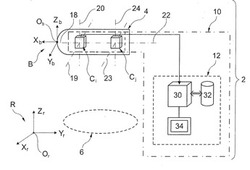
容量式物理量検出装置
【課題】検出範囲によらず、適切な自己診断を行うことのできる容量式物理量検出装置を提供する。
【解決手段】可動部20と、可動部20の変位方向に対向して配置され、可動部20と共に第1容量部16a、16bを構成する第1固定部30、40と、可動部20の変位方向と垂直方向に対向して配置され、可動部20と共に第2容量部17を構成する第2固定部17とを備える。そして、自己診断時に、第1容量部16a、16bに第1変位信号を印加して第1容量部16a、16bで発生する静電気力によって可動部20を当該可動部20の変位方向に変位させ、第2容量部17に第2変位信号を印加して第2容量部17で発生する静電気力によって可動部20を垂直方向に変位させる。
(もっと読む)
多軸センサ出力補正装置及び多軸センサ出力補正方法
【課題】物理量測定素子の感知方向と標準座標系の対応する標準軸とがずれても、標準軸の感度の直交性を有する物理量を求める多軸センサ出力補正装置及び方法を提供する。
【解決手段】本発明の多軸センサ出力補正装置は、一つの物理量における特定方向の成分を測定する軸センサを複数組み合わせて構成された多軸センサの軸センサ毎の軸センサ測定物理量を、標準座標系の標準軸に対する軸ずれを補正し、標準軸に対応する軸センサ対応物理量に補正する装置であり、軸センサ各々が測定する軸センサ測定物理量を、標準軸の軸センサ対応物理量に補正する補正係数が記憶された記憶部と、この記憶部の補正係数により、軸センサ測定物理量を軸センサ対応物理量に補正する測定値補正部を有し、標準座標系における方向と強さとが自明の物理量である印加物理量を、軸センサに与えて軸センサ出力値を得て、印加物理量と軸センサ出力値から補正係数が求められている。
(もっと読む)
加速度センサ特性評価方法及びプログラム
【課題】センサ主軸の方向を回転行列及びその逆行列を用いて演算し、コスト、測定時間及び測定精度の向上を図る。
【解決手段】加速度センサパッケージ1を固定する正三角状のテーブル2の各頂点に、同一長さrたとえば50mmのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して等速円運動が可能となる。この等速円運動の角度θはテーブル2上に設けられたロータリエンコーダ2aによって検出される。加速度センサパッケージ1は同時にx方向、y方向に正弦波振動を受け、これにより、加速度センサパッケージ1の2軸同時測定が可能となる。また、加速度センサパッケージ1の既知の変位がリンク3−1、3−2、3−3の長さrを半径とする真円で保証されるので、加速度センサパッケージ1の測定値の補正も可能となる。
(もっと読む)
加速度補正装置と加速度補正方法、および加速度補正プログラム
【課題】 本発明は、ドライブレコーダに記録された加速度データに含まれる重力起因の加速度誤差を除いて車両起因による加速度を算出する加速度補正装置と加速度補正方法、および加速度補正プログラムに関するものである。
【解決手段】 本発明の加速度補正装置は、車両走行中に計測された加速度データとGPS測位データとを含む走行データを複数取得するとともに、走行データの計測に関する時間情報を取得するデータ取得部と、複数取得した走行データに含まれる加速度データと、取得した時間情報とに基づいて、車両の推定位置を算出するとともに、GPS測位データに基づく測位位置と推定位置との差分に基づいて、車両に働く重力加速度のうち車両の進行方向に作用する重力加速度である重力起因加速度を導出する重力起因加速度導出部と、取得した加速度データから重力起因加速度を減算する補正部と、を有するよう構成する。
(もっと読む)
車両制御装置
【課題】路面勾配ごとの加速度推定値を記したマップを必要とせず、かつ、車両への積載重量の影響を受けることなく、Gセンサの0点補正が行えるようにする。
【解決手段】制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態を判定し、自由降下状態の際のGセンサ値をオフセットとしてGセンサ3の0点補正を行う。自由降下状態の際には、車両への積載重量などの影響を受けることなくGセンサ3の検出信号から求められるGセンサ値は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ値をオフセットとしてGセンサ3の0点補正を行うことで、車両への積載重量の影響を受けることなく、Gセンサ3の0点補正を行うことが可能となる。また、Gセンサ3の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
(もっと読む)
加速度検出装置
【課題】加速度センサ及びAD変換器に印加される電圧が一致しない場合であっても、誤差を低減又は無くして検出精度を向上させた加速度検出装置を提供する。
【解決手段】加速度に対応する検出電圧Vdatを出力する加速度センサ1と、加速度センサ1の出力する検出電圧Vdatをアナログ/デジタル変換して変換した値を出力するAD変換部32と、加速度センサ1に電圧印加するセンサ電源30の電圧VSOを検出し、検出した電源電圧VSOに基づき加速度センサ1に印加されるセンサ電圧VSEを推定するセンサ電圧推定手段5と、予め設定された加速度センサ若しくはAD変換器における電圧とゲインとの相関情報6aを保持し、センサ電圧推定手段5の推定したセンサ電圧VSEに応じたゲインで変換された値になるように、AD変換部32から出力される値を相関情報6aを用いて補正する補正部6とを有する。
(もっと読む)
サンプリング周期設定方法および電子機器
【課題】電子機器の加速度を監視する際の適切なサンプリング周期を設定するサンプリング周期設定方法を提供することである。
【解決手段】本発明に係るサンプリング周期設定方法は、第1のサンプリング周期で加速度センサ120の出力値を所定時間測定するステップと、測定するステップにより測定した加速度センサ120の出力値から、当該加速度センサ120の出力値の極値を抽出するステップと、抽出するステップにより抽出した極値間の時間間隔の平均値を計算するステップと、平均値に基づいて、当該電子機器100の設置後に加速度センサ120の出力値を監視する際の、第1のサンプリング周期より長い第2のサンプリング周期を決定するステップと、第2のサンプリング周期を電子機器100が加速度センサ120の出力値を監視する際のサンプリング周期に設定するステップとを含むことを特徴とする。
(もっと読む)
1 - 10 / 218
[ Back to top ]