
乗客コンベア
【課題】 自動運転機能を付加した乗客コンベアにおいて、搬送能力の向上や安全面向上の観点から運転速度を変化させた場合や、初期状態における設定速度を変更した場合であっても、最適な運転時間が設定できる乗客コンベアを提供する。
【解決手段】 本発明の乗客コンベア1は、自動運転機能のために、乗降口近傍に設けられ利用者の接近を検出する利用者検出手段11、12と、移動手すり9の所定移動量ごとにパルス信号を発生させるパルス信号発生手段13と、運転制御手段14とを備えている。この運転制御手段14は、前記利用者検出手段11、12からの信号により踏段3の駆動を開始させるとともに前記パルス信号発生手段13からのパルス信号のカウントを開始して、前記パルス信号のカウントにより求められる移動手すり9の移動量が一方の乗降口から他方の乗降口までの移動手すり9の距離の値に達した後に前記踏段3の駆動を停止させるものである。
【解決手段】 本発明の乗客コンベア1は、自動運転機能のために、乗降口近傍に設けられ利用者の接近を検出する利用者検出手段11、12と、移動手すり9の所定移動量ごとにパルス信号を発生させるパルス信号発生手段13と、運転制御手段14とを備えている。この運転制御手段14は、前記利用者検出手段11、12からの信号により踏段3の駆動を開始させるとともに前記パルス信号発生手段13からのパルス信号のカウントを開始して、前記パルス信号のカウントにより求められる移動手すり9の移動量が一方の乗降口から他方の乗降口までの移動手すり9の距離の値に達した後に前記踏段3の駆動を停止させるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エスカレータや動く歩道等の乗客コンベアに係り、特に乗客コンベアの乗降口で利用者の有無を検出し、その利用者の有無に応じて乗客コンベアの運転、停止を制御する自動運転機能を付加した乗客コンベアに関するものである。
【背景技術】
【0002】
乗客コンベアの乗降口で利用者の有無を検出し、利用者がいないときには運転を停止して省エネルギー化を図る自動運転機能を付加した乗客コンベアは、利用客が時間帯により利用客が著しく減少するような場所、例えば、列車の発着に合わせて利用客が増減するような駅や、ショッピングセンター等における駐車場へ向かう場所等に設けられ、広く利用されてきている。これまでの自動運転機能を付加した乗客コンベアは、その大半が、利用者を検出して運転を開始してから停止するまでの運転時間の設定について、乗客コンベアの運転速度と階高とにより、利用者が乗口から降口まで到達するまでの時間を算出して、その時間に若干の余裕を付加した時間を設定時間として、時間単位で設定していた。
【0003】
このような自動運転機能を付加した乗客コンベアを含め、乗客コンベアの大半は、利用者を乗せ一方の乗降口から他方の乗降口まで移送する踏段の移動速度について、常に一定速度で運転するのが一般的である。したがって、このように運転速度が一定の乗客コンベアの場合には、前記自動運転機能の運転時間を、前述のように時間単位で設定して運転の制御をしても特に問題はなかった。
【0004】
しかし、近年、搬送能力の向上のため、あるいは安全面の向上のために、使用用途などに応じて変速可能な多段速切替式の乗客コンベアが開発され、その設置台数も増加傾向にある。かかる多段速切換え式乗客コンベアであっても、自動運転機能を付加した乗客コンベアは、利用者が乗口から降口まで移送される途中で乗客コンベアを自動停止させないように制御する必要がある。そのため、従来の多段速切換え式乗客コンベアにおいては、利用客が乗口から降口まで到達するまでの時間の設定を、多段速切替式の乗客コンベアで選択可能な運転速度のうち、最低速となる速度で運転する場合に要する時間を用いて設定する必要があった。
【0005】
ところが、このような設定で自動運転の制御を行った場合、乗客コンベアを最低速以外で高速運転をしたときには、利用者が降口に到達するまでの時間が、最低速度で運転した時よりも短くなるため、乗客コンベアを停止させるまでの運転時間が必要以上に長くなっていた。そのため、自動運転機能を付加した乗客コンベアの本来の使用目的である省エネルギー化の意図とは反する運転となっていた。
【0006】
また、乗客コンベアの搬入後に初期速度の設定を変更して、最低速度を変えることがあるが、この場合には、その変更の都度、運転時間の設定を見直す手間が必要であった。
【0007】
また、特許文献1のように、自動運転機能を付加した乗客コンベアに関して、運転時間の設定を、複数の踏段のうち特定の踏段が一回転する時間を検出し、この時間に基づいて時間単位又は距離により選定したものもあるが、この場合、多数ある踏段のうち、一つの踏段の通過を検出する検出器を負荷する必要があるため、従来の時間単位で設定する制御装置よりコスト高になっている。
【特許文献1】特開平7−277653号公報
【0008】
さらに、自動運転機能とは別に、乗客コンベアの複数の踏段を連結する踏段チェーンに給油をするために設けられている自動給油装置について、従来の乗客コンベアでは、無端状に循環移動している踏段チェーンの全長にわたり給油をする時間の設定を、前述した自動運転制御の場合と同様に、時間単位で設定していた。しかし、かような時間単位の設定で給油すると、運転速度が変化する多段速切換え式の乗客コンベアでは、給油時の速度が一定でないため、最適な時間で給油が行えなかった。この不具合は、多段速切換え式乗客コンベアであれば、自動運転機能を付加しないものでも同様の不具合が発生していた。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は、前記の不具合を解消するためになされたもので、自動運転機能を付加した乗客コンベアにおいて、運転速度が変化した場合や、設定速度を変更した場合であっても、最適な運転時間が設定でき、また、自動給油装置の給油時間も速度の変化にとらわれることなく、最適な給油時間を設定できる比較的安価な乗客コンベアを提供することにある。
【課題を解決するための手段】
【0010】
本発明は、一方の乗降口と他方の乗降口との間を循環移動する複数の踏段と、前記踏段と同期して前記踏段と同じ方向に循環移動する移動手すりと、前記乗降口近傍に設けられ利用者が前記乗降口に接近したことを検出する利用者検出手段と、前記移動手すりの所定移動量ごとにパルス信号を発生させるパルス信号発生手段と、前記利用者検出手段からの利用者検出信号が入力されたときに前記踏段の駆動を開始させるとともに前記パルス信号発生手段からのパルス信号のカウントを開始して、前記パルス信号のカウントにより求められる移動手すりの移動量が一方の乗降口から他方の乗降口までの移動手すりの距離の値に達した後に前記踏段の駆動を停止させる運転制御手段と、を備えることを特徴とする乗客コンベアである。
【発明の効果】
【0011】
本発明によれば、自動運転機能を付加した乗客コンベアであって、運転速度を変化させることができるものについて、操作者が運転速度を変更した場合や遠隔操作などで運転中に変速制御を行った場合、又は、保守員により運転速度の初期設定を変更した場合でも、運転時間の見直しを必要とせずに、常に最適な運転時間で乗客コンベアを運転することができるため、不必要な運転することや、運転時間の初期設定変更を行った場合の運転時間の再検討を必要とせず、省エネルギー効果の向上と検討手間や作業手間を軽減できる。
【発明を実施するための最良の形態】
【0012】
(実施例1)
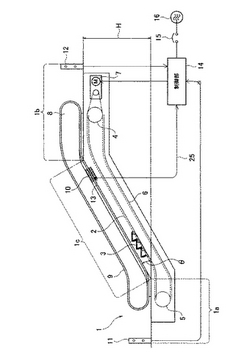
図1は、本発明の乗客コンベアの一実施例の構成図である。図示した乗客コンベアは、利用者を移送する速度を多段に速度切換えが可能で、かつ、上昇運転又は下降運転が可能なものを示している。なお、本発明に従う乗客コンベアは、多段変速の切換えを行うものに限られず、運転速度が一定速度の乗客コンベアであってもよいが、以下の説明では、多段速度への切換えが可能な乗客コンベアを用いて説明する。
【0013】
図1において、乗客コンベア1は、利用者の移動行程において下階側の床面と同一高さの平面を有する部分である下階乗降部1aと、上階側の床面と同一高さの平面を有する部分である上階乗降部1bと、前記下階乗降部1aと上階乗降部1bとの間の部分である傾斜部1cとに大別されるエスカレータである。
【0014】
乗客コンベア1は、前記下階乗降部1aと、前記上階乗降部1bとの間を踏段チェーン2により連結されて無端状に循環移動する多数の踏段3を備えている。
【0015】
また、上階乗降部1b側の折り返し部には、前記踏段チェーン2を駆動する駆動スプロケット4が設けられ、一方、下階乗降部1a側の折り返し部に前記踏段チェーン2と係合し回転する従動スプロケット5が設けられ、前記駆動スプロケット4と従動スプロケット5との間に前記踏段3の移動を案内するガイドレール6が設けられている。前記上階乗降部1b側の折り返し部には、前記駆動スプロケット4を駆動するモータ7が設けられ、このモータ7を駆動させることにより、前記踏段3を、前記駆動スプロケット4と前記従動スプロケット5との間で前記ガイドレール6に案内されつつ無端状に移動させるようになっている。
【0016】
また、前記踏段の両側端にそれぞれ近接して欄干8が立設され、前記欄干8には前記踏段3と同じ方向に同期して循環移動する無端状の移動手すり9が取り付けられ、また、前記移動手すり9を駆動する移動手すり駆動装置10とが設けられている。
【0017】
下階乗降部1aには、下階部近傍における利用者の接近を検知する利用者検出手段としての下階部利用者検出装置11が設けられ、上階乗降部1bには、上階部近傍における利用者の接近を検知する利用者検出手段としての上階部利用者検出装置12が設けられている。また、前記移動手すり駆装置10には、前記移動手すり9の駆動に合わせて、前記移動手すりの所定移動量ごとにパルス信号を発生させる手段としてのパルス信号発生装置13が設けられている。このパルス信号発生装置13は、前記下階部利用者検出装置11及び前記上階部利用者検出装置12とともに、運転制御手段としての制御部14に接続されている。
【0018】
前記制御部14は、前記下階部利用者検出装置11又は前記上階部利用者検出装置12により検出された利用者の接近により乗客コンベア1の運転を開始させ、また利用者がいない場合に乗客コンベア1の運転を停止させる制御を行うために前記モータ7に接続されている。また、前記制御部14は、主要回路用遮断器15を介して三相交流電源16に接続されている。
【0019】
図2は、前記移動手すり駆動装置10に取り付けられた、パルス信号発生装置13の一例を示した図である。移動手すり駆動装置10は、駆動ローラー10aと押圧ローラー10bとの組み合わせを一対として複数対のローラーが移動手すり9を挟圧駆動する構成になる。
【0020】
パルス信号発生装置13は、移動手すり駆動装置10の押圧ローラー10bに取り付け固定されて前記押圧ローラー10bの回転により前記押圧ローラー10bと同軸に回転する検出片13aを有している。検出片13aは、その周部に径方向に突出する突出部を有していて、図2の検出片13aでは、一例として突出部が6個、すなわち、検出片が6片のものを示している。
【0021】
また、前記押圧ローラー10bの回転支軸にはセンサ支え13bが取り付けられ、このセンサ支え13bに前記検出片13aの回転を検出するセンサ13cが取り付けられている。このセンサ13cは、前記検出片の回転により前記突出部が近傍を通過するのを検出してパルス信号を出力する近接センサにより構成されていて、前記押圧ローラー10bが回転した際、検出片13aの突出部の近接をセンサ13cが検出することにより、移動手すり9の移動に合わせて、移動手すり9の所定移動量ごとにパルス信号を発生する構成となる。
【0022】
図1、図2に示した乗客コンベア1の一実施例において、利用者が下階乗降部1aから乗客コンベア1の踏段3上に乗り、上階乗降部1bまで移動することを考える。下階乗降部1aは乗口となり、上階乗降部1bは降口となる。本実施例では、従来、利用者が乗口から降口に到達する時間により運転制御していたのに対して、利用者が乗口から降口まで踏段3の移動とともに移動する距離に置き換えて運転制御する。
【0023】
踏段3が乗口から降口まで移動する距離は、乗客コンベア1の傾斜部1cの距離となり、この傾斜部1cの距離は、階高Hと傾斜角θにより求められる。踏段3と移動手すり9とは、ほぼ同期して駆動するため、踏段3の移動距離と移動手すり9の移動距離は、等しくなると考えることができる。
【0024】
移動手すり9の移動距離は、パルス信号発生装置13によりパルスを発生させることにより求めることができる。すなわち、押圧ローラー10bが一回転する際の移動手すり9の移動距離は、押圧ローラー10bの円周長と同じであり、また、押圧ローラー10bが一回転したときにパルス信号発生装置13のセンサ13cから発生するパルス数は、本実施例では検出片13aを6片のものとしているため、センサ13cは検出片13aを6回検出し、発生パルス数は6回である。このことから、移動手すり9が押圧ローラー10bの円周分移動する際、パルスが6回発生することになるため、移動手すり9が傾斜部1cの距離だけ移動する際に発生するパルス数を求めることができる。
【0025】
移動手すり9が傾斜部1cの距離だけ移動する際に発生するパルス数を運転パルス数として、その値を設計段階又は工場出荷前に予め制御部14の記憶手段に設定し記憶させておき、運転時には前記パルス信号のカウント数と前記運転パルス数とを比べることにより移動手すり9の移動量が、傾斜部1cの距離だけ移動したことを判断することができる。
【0026】
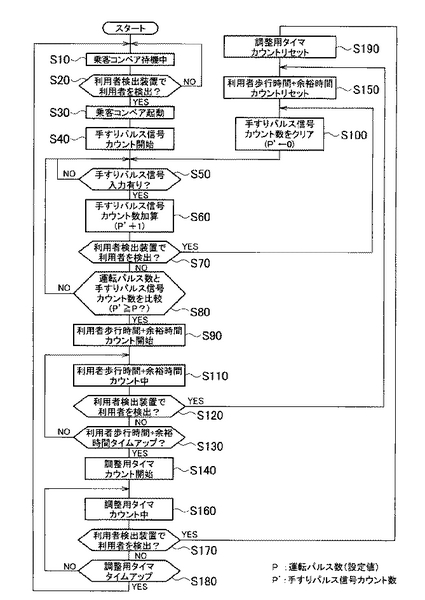
図3は、本実施例における乗客コンベアの制御内容処理を示すフローチャートである。図3を用いて、本実施例の乗客コンベアの動作を以下説明する。
【0027】
図3において、乗客コンベア1が上昇運転の場合で説明すると、まず、乗客コンベア1の利用者がいない場合には、乗客コンベア1の運転を停止し、待機させておく(ステップS10)。次に、下階部利用者検出装置11が利用者を検出すると、制御部14はモータ7を起動させる信号を出力し、乗客コンベア1の運転を開始する(ステップS20、ステップS30)。下階部利用者検出装置11が利用者を検出しない場合には、乗客コンベア1の運転を待機させておく(ステップS10)。
【0028】
前記モータ7を起動させ、乗客コンベア1の運転を開始すると(ステップS30)、移動手すり9の移動も開始される。そこで、パルス信号発生装置13からの手すりパルス信号のカウントを開始する(ステップS40)。この手すりパルス信号のカウントにおいては、まず、制御部14は、パルス信号発生装置13からの信号の入力があるか否かを判定し(ステップS50)、手すりパルス信号の入力がある場合には、手すりパルス信号のカウント数を加算する(ステップS60)。一方、手すりパルス信号の入力がない場合には、手すりパルス信号の入力を待つ(ステップS50)。
【0029】
前記手すりパルス信号のカウント数を加算している間も(ステップS60)、下階部利用者検出装置11により別の利用者が乗口に接近している否かを検出する(ステップS70)。これは、別の利用者が乗口に接近している場合には、その接近している別の利用者を基準に乗客コンベア1の自動運転を制御するためである。
【0030】
下階部利用者検出装置11により別の利用者が検出されない場合には、予め制御部14に設定記憶された前記運転パルス数と、ステップS60で加算された手すりパルス信号のカウント数とを比較する(ステップS80)。そして、手すりパルス信号のカウント数P’が運転パルス数P以上である場合には、利用者が下階乗降部1aと上階乗降部1bを歩行する時間及び余裕時間のカウントを開始する(ステップS90)。一方、手すりパルス信号のカウント数P’が運転パルス数P未満である場合には、手すりパルス信号の入力を待ち(ステップS50)、手すりパルス信号のカウントを繰り返す。
【0031】
一方、前記ステップS70で下階部利用者検出装置11により別の利用者が検出された場合には、制御部14における手すりパルス信号カウント数をクリアし(ステップS100)、カウントを0からあらためて開始するようにして手すりパルス信号の入力を待つ(ステップS50)。
【0032】
利用者歩行時間と余裕時間のカウント(ステップ110)においては、利用者歩行時間と余裕時間として必要な合計時間は、設定値として制御部14内の記憶手段に記憶させておく。
【0033】
前記利用者歩行時間と余裕時間のカウントをしている間においても(ステップS110)、下階部利用者検出装置11により別の利用者が乗口に接近している否かを検出する(ステップS120)。下階部利用者検出装置11により別の利用者が検出されない場合には、利用者歩行時間と余裕時間のカウント時間が、あらかじめ制御部14に設定記憶させておいた必要な合計時間に達したか否かを判定する(ステップS130)。そして、この利用者歩行時間と余裕時間のカウント時間が必要な合計時間に達している場合には、調整用タイマのカウントを開始する(ステップS140)。一方、前記ステップ130で、利用者歩行時間と余裕時間のカウント時間が必要な合計時間に達していない場合には、ステップS110に戻り、利用者歩行時間と余裕時間のカウントを繰り返す。
【0034】
前記ステップS120で下階部利用者検出装置11により別の利用者が検出された場合には、歩行者利用時間と余裕時間のカウントをリセットし(ステップS150)、次いで制御部14における手すりパルス信号カウント数をクリアし(ステップS100)、手すりパルス信号のカウントを0からあらためて開始する(ステップS50)。
【0035】
ステップS140において調整用タイマのカウントを開始し、次いで調整用タイマのカウントしている間にも(ステップS160)、下階部利用者検出装置11により別の利用者が乗口に接近している否かを検出する(ステップS170)。ステップS170で下階部利用者検出装置11により別の利用者が検出されない場合には、調整用タイマのカウント時間が、あらかじめ制御部14に設定記憶させておいた設定時間に達したか否かを判定する(ステップS180)。そして、前記調整用タイマのカウント時間が前記設定時間に達している場合には、ステップS10に戻り、乗客コンベア1の運転を停止させて、乗客コンベア1を待機状態にする。
【0036】
一方、前記ステップS180で前記調整用タイマのカウント時間が前記設定時間に達していない場合には、ステップS160に戻り、調整用タイマのカウントを繰り返す。
【0037】
前記ステップS170で下階部利用者検出装置11により別の利用者が検出された場合には、調整用タイマのカウントをリセットし(ステップS190)、次いで利用者利用時間と余裕時間のカウントをリセットし(ステップS150)、次いで制御部14における手すりパルス信号カウント数をクリアし(ステップS100)、手すりパルス信号のカウントを0からあらためて開始するようにしてステップS50に戻る。
【0038】
以上述べた本実施例の制御部14による制御では、運転時間の設定における利用者が乗客コンベア1の傾斜部1cを移動する時間に関する設定を、移動手すり9の移動距離により設定する。乗客コンベア1の運転速度を変化させた場合でも、移動手すり9が乗口から降口まで移動する距離には変化がないため、利用者が乗客コンベア1の傾斜部1cを移動するときの移動手すりパルス信号のパルス回数は常に一定となる。また、下階乗降部1aと上階乗降部1bにおける利用者歩行時間と余裕時間も一定である。したがって、操作者が乗客コンベア1の運転速度を変更した場合や遠隔操作などで運転中に変速制御を行った場合、又は保守員により運転速度の初期設定を変更した場合でも、パルス信号発生装置13からのパルス信号のカウント数と運転パルス数とを比較して、前記パルス信号のカウントにより求められる移動手すりの移動量が一方の乗降口から他方の乗降口までの移動手すりの距離の値に達した後に乗客コンベア1の運転を停止させることにより、運転時間の見直しを必要とせず、常に最適な運転時間で、乗客コンベアの自動運転制御を行うことができる。
【0039】
このことにより、乗客コンベア1を必要な時間以上に長時間運転することを回避でき、また、運転速度の初期設定変更を行った場合の運転時間の再検討を必要とせず、省エネルギー効果の向上と検討手間の軽減、作業手間の軽減をすることができる。
【0040】
次に、図1及び図2に示した本実施例の乗客コンベア1においては、パルス信号発生装置13は、移動手すり9の速度検出装置に用いられているパルス発生手段と兼用させることができる。すなわち、特開2000−198658号公報、特開平10−36052号公報、特開平8−337382号公報、特開平10−17259号公報に示されるような、移動手すりの停止を検出する装置または移動手すりと踏段との不同期を検出する装置に使用される移動手すりの速度検出装置と兼用することができる。なお、図2のパルス信号発生装置13も、移動手すりの速度検出装置と兼用させたものを示している。
【0041】
このように、本実施例に従い、パルス信号発生装置13を、乗客コンベア1に既設されている移動手すり9の停止を検出する装置、又は移動手すり9と踏段3との不同期を検出する装置に使用される移動手すりの速度検出装置と兼用させることにより、本発明の制御を行ううえで装置要素を特別に追加する必要がなく、ソフトウェアのみで対応できるので、比較的安価な制御装置を提供することができる。
【0042】
(実施例2)
本発明の乗客コンベアの第二実施例について、以下説明する。本実施例においては、乗客コンベア1の階高Hの値を設定値として運転制御装置としての制御部14に設定し、その階高Hの値によって一方の乗降口から他方の乗降口までの移動手すりの距離の値を算出する。
【0043】
第二実施例の乗客コンベア1において、制御部14に設定する運転パルス数の設定方法について説明する。図4は、制御部14内部で処理する演算の内容を示す数式を示している。なお、主要回路及び装置の構成は、図1に示したものと同じである。
【0044】
制御部14に設定する運転パルス数の設定は、現場に設置される乗客コンベア1の一台ごとに傾斜部1cの距離におけるパルス数を計算し、そのパルス数をそのまま制御部14に設定し、記憶させてもよいが、以下に説明する方法でも設定することができる。
【0045】
運転パルス数を階高Hの数値に置き換えて、制御部14に設定する。傾斜角をθ、階高をHとすると、傾斜部1cの距離は、H・cosecθで算出できる。傾斜部1cの距離が、パルス信号発生装置13の検出片13aが取り付けられている押圧ローラー10bの何回転分に相当するかを算出すると、運転パルス数を求めることができる。
【0046】
この運転パルス数をPとすると、運転パルス数Pは、図4に示す階高設定時演算処理に記載の式となり、この演算処理を制御部14で行うことにより、運転パルス数Pを階高17の数値に置き換えて設定することができる。図4に示す階高設定時演算処理に用いられる値のうち、傾斜角θ、押圧ローラー10bの一回転におけるパルス発生数A及び押圧ローラー10bの半径rは、乗客コンベア1の一台ごとに変化する数値ではないため、確定要素としてシステム設計時にプログラムに登録して制御部14に記憶させておく。そうすると、実操業において不確定要素は階高Hのみとなり、乗客コンベア1の一台ごとに階高Hを設定すると、制御部14の内部で前述した階高設定時演算処理が行われ、運転パルス数Pを求めることができる。
【0047】
また、図4に示した階高設定時演算処理の代わりに、運転パルス数Pを移動手すり9の全長(周長)に置き換えて、制御部14に設定することもできる。
【0048】
すなわち、傾斜部1cの距離は、詳細にまで算出する必要はないので、無端状の移動手すり9の全長をLhとすると、傾斜部1cに相当する距離は、移動手すり9の全長の約半分弱の長さであるとすることができる。
【0049】
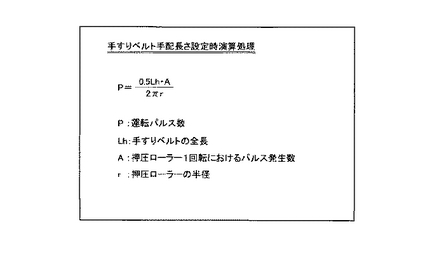
そのことから、傾斜部1cの距離は、一例として0.5・Lhとして、前記同様に傾斜部1cの距離が押圧ローラー10bの何回転分に相当するかを算出すると、運転パルス数Pが求められる。運転パルス数をPとすると、運転パルス数Pは、図5に示す手すりベルト長さ設定時演算処理に記載の式となり、この延在処理を制御部14で行うことにより、運転パルス数Pを移動手すり9の全長に置き換えて設定することができる。前述した階高設定時演算処理の場合と同様に、手すりベルト長さ設定時演算処理における不確定要素は移動手すりの全長Lhのみとなり、乗客コンベアの一台ごとに前記移動手すり9の全長Lhを設定すると、制御部14の内部で前述した移動手すり長さ設定時演算処理が行われ、運転パルス数Pを求めることができる。
【0050】
このように、階高Hの数値や移動手すり9の全長に置き換えて、運転パルス数Pを設定することにより、制御装置の設計手配時にその都度、運転パルス数を計算する必要がなくなる。また、簡単で分かりやすい設定になるため、設計手間の軽減や、誤設定の防止につながる。
【0051】
(実施例3)
次に本発明の乗客コンベアの第三実施例について説明する。乗客コンベア1は、現地搬入後に運転時間を調整することがある。この運転時間の調整をする場合の制御部14の制御について、本実施例では、利用者が一方の乗降口から他方の乗降口まで到達するのに必要な最低限の時間よりも増加させる設定にのみ変更可能とし、前記最低限の時間よりも減少させる設定には変更不能とする。なお、主要回路及び装置の構成は、図1に示したものと同じである。また、図3に示したフローチャートのうち、主としてステップS140〜ステップS180が本実施例に相当する。
【0052】
乗客コンベア1の運転時間について、運転パルス数のカウントに要する時間に利用者の歩行時間と余裕時間とを加えた時間を、その乗客コンベア1に対する最小設定値とし、現地搬入後に前記最小設定値は、運転時間を調整する上で変更できないような処理とする。
【0053】
かような現地搬入後の運転時間の調整は、図3のフローチャートのステップS140〜ステップS180に示す調整用タイマを設定することによって行う。調整用タイマは、運転時間の運転パルス数のカウントと、利用者の歩行時間及び余裕時間のカウントが終了するステップS130の後に、カウントを開始する(ステップS140)。調整用タイマのカウントが終了するステップS180で乗客コンベア1は待機状態となるように制御する。調整用タイマの初期値は0とし、設定値の増加のみ変更可能として、調整用タイマの操作では、前記最小設定値より運転時間を短くする調整はできないようにしている。
【0054】
かくして、現地で運転時間の調整を行う際に、誤って運転時間を前記最小設定値よりも短いほど極端に短く設定して、利用者が乗客コンベア1を利用中に乗客コンベアの運転が運転時間のタイムアップによって停止するおそれを未然に防ぐことができる。そのため、安全面をいっそう向上させた乗客コンベアを提供できる。
【0055】
(実施例4)
次に本発明の乗客コンベアの第四実施例について説明する。本実施例は、複数の踏段3を連結する踏段チェーン2に給油を行う自動給油装置の給油時間を移動手すり9の移動距離に基づいて制御するものである。なお、主要回路及び装置の構成は、図1に示したものと同様である。
【0056】
実施例1と同様のパルス信号発生装置13を備えた乗客コンベア1において、自動給油装置の給油1回に必要な給油時間を、踏段3が約1周回する時間とする。この場合、踏段3が1周回する距離を、移動手すり9の移動距離によって求め、踏段3が1周回する時間を判断する。
【0057】
踏段3の1周回する距離は、ガイドレール6の全長と駆動スプロケット4の半周分の長さと従動スプロケット5の半周分の長さとの和であるため、これらのガイドレール6の全長と駆動スプロケット4の半周分の長さと従動スプロケット5の半周分の長さと和の距離分、移動手すり9が移動する際に発生するパルス数を、給油パルス数P”として、あらかじめ制御部14に設定し、記憶させておく。
【0058】
本実施例の自動給油装置の制御処理の具体的内容を、図6に示すフローチャートに従って以下説明する。
【0059】
踏段チェーン2に給油を行うに当たっては、まず、自動給油装置を起動させ(ステップS210)、給油を開始すると、で移動手すり駆動装置10の押圧ローラー10bに取り付けられたパルス信号発生装置13からの手すりパルス信号のカウントを開始する(ステップS220)。この手すりパルス信号のカウントにおいては、まず、制御部14は、パルス信号発生装置13からの信号の入力があるか否かを判定し(ステップS230)、手すりパルス信号の入力がある場合には、手すりパルス信号のカウント数を加算し(ステップS240)、ステップS250に進む。一方、ステップS230で手すりパルス信号の入力がない場合には、手すりパルス信号の入力を待つ。
【0060】
前記ステップS250では、予め制御部14に設定記憶された前記給油パルス数P”と、ステップS240で加算された手すりパルス信号のカウント数とを比較する。そして、手すりパルス信号のカウント数P’が給油パルス数P”以上である場合には、自動給油装置による給油を停止させ(ステップS260)、終了する。
【0061】
このような制御を行うと、給油が開始される際の運転速度に関係なく、踏段3が1周回する分だけ給油をすることができるため、給油時間の設定を最低速運転で踏段が1周回する時間として設定した場合の過給油や、最高速運転で踏段が1周回する時間として設定した場合の給油不足を防ぐことができ、常に最適な給油時間で給油することができる。
【図面の簡単な説明】
【0062】
【図1】本発明の乗客コンベアの一実施例の構成図である。
【図2】パルス信号発生装置の一例を示す図である。
【図3】実施例における乗客コンベアの制御内容処理を示すフローチャートである。
【図4】制御部14内部で処理する階高設定時演算処理の内容を示す図である。
【図5】制御部14内部で処理する手すりベルト長さ設定時演算処理の内容を示す図である。
【図6】実施例における自動給油装置の制御処理の具体的内容を示すフローチャートである。
【符号の説明】
【0063】
1 乗客コンベア
3 踏段
9 移動手すり
10 移動手すり駆動装置
11 下階部利用者検出装置(利用者検出手段)
12 上階部利用者検出装置(利用者検出手段)
13 パルス信号発生装置(パルス信号発生手段)
14 制御部(運転制御手段)
H…階高
【技術分野】
【0001】
本発明は、エスカレータや動く歩道等の乗客コンベアに係り、特に乗客コンベアの乗降口で利用者の有無を検出し、その利用者の有無に応じて乗客コンベアの運転、停止を制御する自動運転機能を付加した乗客コンベアに関するものである。
【背景技術】
【0002】
乗客コンベアの乗降口で利用者の有無を検出し、利用者がいないときには運転を停止して省エネルギー化を図る自動運転機能を付加した乗客コンベアは、利用客が時間帯により利用客が著しく減少するような場所、例えば、列車の発着に合わせて利用客が増減するような駅や、ショッピングセンター等における駐車場へ向かう場所等に設けられ、広く利用されてきている。これまでの自動運転機能を付加した乗客コンベアは、その大半が、利用者を検出して運転を開始してから停止するまでの運転時間の設定について、乗客コンベアの運転速度と階高とにより、利用者が乗口から降口まで到達するまでの時間を算出して、その時間に若干の余裕を付加した時間を設定時間として、時間単位で設定していた。
【0003】
このような自動運転機能を付加した乗客コンベアを含め、乗客コンベアの大半は、利用者を乗せ一方の乗降口から他方の乗降口まで移送する踏段の移動速度について、常に一定速度で運転するのが一般的である。したがって、このように運転速度が一定の乗客コンベアの場合には、前記自動運転機能の運転時間を、前述のように時間単位で設定して運転の制御をしても特に問題はなかった。
【0004】
しかし、近年、搬送能力の向上のため、あるいは安全面の向上のために、使用用途などに応じて変速可能な多段速切替式の乗客コンベアが開発され、その設置台数も増加傾向にある。かかる多段速切換え式乗客コンベアであっても、自動運転機能を付加した乗客コンベアは、利用者が乗口から降口まで移送される途中で乗客コンベアを自動停止させないように制御する必要がある。そのため、従来の多段速切換え式乗客コンベアにおいては、利用客が乗口から降口まで到達するまでの時間の設定を、多段速切替式の乗客コンベアで選択可能な運転速度のうち、最低速となる速度で運転する場合に要する時間を用いて設定する必要があった。
【0005】
ところが、このような設定で自動運転の制御を行った場合、乗客コンベアを最低速以外で高速運転をしたときには、利用者が降口に到達するまでの時間が、最低速度で運転した時よりも短くなるため、乗客コンベアを停止させるまでの運転時間が必要以上に長くなっていた。そのため、自動運転機能を付加した乗客コンベアの本来の使用目的である省エネルギー化の意図とは反する運転となっていた。
【0006】
また、乗客コンベアの搬入後に初期速度の設定を変更して、最低速度を変えることがあるが、この場合には、その変更の都度、運転時間の設定を見直す手間が必要であった。
【0007】
また、特許文献1のように、自動運転機能を付加した乗客コンベアに関して、運転時間の設定を、複数の踏段のうち特定の踏段が一回転する時間を検出し、この時間に基づいて時間単位又は距離により選定したものもあるが、この場合、多数ある踏段のうち、一つの踏段の通過を検出する検出器を負荷する必要があるため、従来の時間単位で設定する制御装置よりコスト高になっている。
【特許文献1】特開平7−277653号公報
【0008】
さらに、自動運転機能とは別に、乗客コンベアの複数の踏段を連結する踏段チェーンに給油をするために設けられている自動給油装置について、従来の乗客コンベアでは、無端状に循環移動している踏段チェーンの全長にわたり給油をする時間の設定を、前述した自動運転制御の場合と同様に、時間単位で設定していた。しかし、かような時間単位の設定で給油すると、運転速度が変化する多段速切換え式の乗客コンベアでは、給油時の速度が一定でないため、最適な時間で給油が行えなかった。この不具合は、多段速切換え式乗客コンベアであれば、自動運転機能を付加しないものでも同様の不具合が発生していた。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は、前記の不具合を解消するためになされたもので、自動運転機能を付加した乗客コンベアにおいて、運転速度が変化した場合や、設定速度を変更した場合であっても、最適な運転時間が設定でき、また、自動給油装置の給油時間も速度の変化にとらわれることなく、最適な給油時間を設定できる比較的安価な乗客コンベアを提供することにある。
【課題を解決するための手段】
【0010】
本発明は、一方の乗降口と他方の乗降口との間を循環移動する複数の踏段と、前記踏段と同期して前記踏段と同じ方向に循環移動する移動手すりと、前記乗降口近傍に設けられ利用者が前記乗降口に接近したことを検出する利用者検出手段と、前記移動手すりの所定移動量ごとにパルス信号を発生させるパルス信号発生手段と、前記利用者検出手段からの利用者検出信号が入力されたときに前記踏段の駆動を開始させるとともに前記パルス信号発生手段からのパルス信号のカウントを開始して、前記パルス信号のカウントにより求められる移動手すりの移動量が一方の乗降口から他方の乗降口までの移動手すりの距離の値に達した後に前記踏段の駆動を停止させる運転制御手段と、を備えることを特徴とする乗客コンベアである。
【発明の効果】
【0011】
本発明によれば、自動運転機能を付加した乗客コンベアであって、運転速度を変化させることができるものについて、操作者が運転速度を変更した場合や遠隔操作などで運転中に変速制御を行った場合、又は、保守員により運転速度の初期設定を変更した場合でも、運転時間の見直しを必要とせずに、常に最適な運転時間で乗客コンベアを運転することができるため、不必要な運転することや、運転時間の初期設定変更を行った場合の運転時間の再検討を必要とせず、省エネルギー効果の向上と検討手間や作業手間を軽減できる。
【発明を実施するための最良の形態】
【0012】
(実施例1)
図1は、本発明の乗客コンベアの一実施例の構成図である。図示した乗客コンベアは、利用者を移送する速度を多段に速度切換えが可能で、かつ、上昇運転又は下降運転が可能なものを示している。なお、本発明に従う乗客コンベアは、多段変速の切換えを行うものに限られず、運転速度が一定速度の乗客コンベアであってもよいが、以下の説明では、多段速度への切換えが可能な乗客コンベアを用いて説明する。
【0013】
図1において、乗客コンベア1は、利用者の移動行程において下階側の床面と同一高さの平面を有する部分である下階乗降部1aと、上階側の床面と同一高さの平面を有する部分である上階乗降部1bと、前記下階乗降部1aと上階乗降部1bとの間の部分である傾斜部1cとに大別されるエスカレータである。
【0014】
乗客コンベア1は、前記下階乗降部1aと、前記上階乗降部1bとの間を踏段チェーン2により連結されて無端状に循環移動する多数の踏段3を備えている。
【0015】
また、上階乗降部1b側の折り返し部には、前記踏段チェーン2を駆動する駆動スプロケット4が設けられ、一方、下階乗降部1a側の折り返し部に前記踏段チェーン2と係合し回転する従動スプロケット5が設けられ、前記駆動スプロケット4と従動スプロケット5との間に前記踏段3の移動を案内するガイドレール6が設けられている。前記上階乗降部1b側の折り返し部には、前記駆動スプロケット4を駆動するモータ7が設けられ、このモータ7を駆動させることにより、前記踏段3を、前記駆動スプロケット4と前記従動スプロケット5との間で前記ガイドレール6に案内されつつ無端状に移動させるようになっている。
【0016】
また、前記踏段の両側端にそれぞれ近接して欄干8が立設され、前記欄干8には前記踏段3と同じ方向に同期して循環移動する無端状の移動手すり9が取り付けられ、また、前記移動手すり9を駆動する移動手すり駆動装置10とが設けられている。
【0017】
下階乗降部1aには、下階部近傍における利用者の接近を検知する利用者検出手段としての下階部利用者検出装置11が設けられ、上階乗降部1bには、上階部近傍における利用者の接近を検知する利用者検出手段としての上階部利用者検出装置12が設けられている。また、前記移動手すり駆装置10には、前記移動手すり9の駆動に合わせて、前記移動手すりの所定移動量ごとにパルス信号を発生させる手段としてのパルス信号発生装置13が設けられている。このパルス信号発生装置13は、前記下階部利用者検出装置11及び前記上階部利用者検出装置12とともに、運転制御手段としての制御部14に接続されている。
【0018】
前記制御部14は、前記下階部利用者検出装置11又は前記上階部利用者検出装置12により検出された利用者の接近により乗客コンベア1の運転を開始させ、また利用者がいない場合に乗客コンベア1の運転を停止させる制御を行うために前記モータ7に接続されている。また、前記制御部14は、主要回路用遮断器15を介して三相交流電源16に接続されている。
【0019】
図2は、前記移動手すり駆動装置10に取り付けられた、パルス信号発生装置13の一例を示した図である。移動手すり駆動装置10は、駆動ローラー10aと押圧ローラー10bとの組み合わせを一対として複数対のローラーが移動手すり9を挟圧駆動する構成になる。
【0020】
パルス信号発生装置13は、移動手すり駆動装置10の押圧ローラー10bに取り付け固定されて前記押圧ローラー10bの回転により前記押圧ローラー10bと同軸に回転する検出片13aを有している。検出片13aは、その周部に径方向に突出する突出部を有していて、図2の検出片13aでは、一例として突出部が6個、すなわち、検出片が6片のものを示している。
【0021】
また、前記押圧ローラー10bの回転支軸にはセンサ支え13bが取り付けられ、このセンサ支え13bに前記検出片13aの回転を検出するセンサ13cが取り付けられている。このセンサ13cは、前記検出片の回転により前記突出部が近傍を通過するのを検出してパルス信号を出力する近接センサにより構成されていて、前記押圧ローラー10bが回転した際、検出片13aの突出部の近接をセンサ13cが検出することにより、移動手すり9の移動に合わせて、移動手すり9の所定移動量ごとにパルス信号を発生する構成となる。
【0022】
図1、図2に示した乗客コンベア1の一実施例において、利用者が下階乗降部1aから乗客コンベア1の踏段3上に乗り、上階乗降部1bまで移動することを考える。下階乗降部1aは乗口となり、上階乗降部1bは降口となる。本実施例では、従来、利用者が乗口から降口に到達する時間により運転制御していたのに対して、利用者が乗口から降口まで踏段3の移動とともに移動する距離に置き換えて運転制御する。
【0023】
踏段3が乗口から降口まで移動する距離は、乗客コンベア1の傾斜部1cの距離となり、この傾斜部1cの距離は、階高Hと傾斜角θにより求められる。踏段3と移動手すり9とは、ほぼ同期して駆動するため、踏段3の移動距離と移動手すり9の移動距離は、等しくなると考えることができる。
【0024】
移動手すり9の移動距離は、パルス信号発生装置13によりパルスを発生させることにより求めることができる。すなわち、押圧ローラー10bが一回転する際の移動手すり9の移動距離は、押圧ローラー10bの円周長と同じであり、また、押圧ローラー10bが一回転したときにパルス信号発生装置13のセンサ13cから発生するパルス数は、本実施例では検出片13aを6片のものとしているため、センサ13cは検出片13aを6回検出し、発生パルス数は6回である。このことから、移動手すり9が押圧ローラー10bの円周分移動する際、パルスが6回発生することになるため、移動手すり9が傾斜部1cの距離だけ移動する際に発生するパルス数を求めることができる。
【0025】
移動手すり9が傾斜部1cの距離だけ移動する際に発生するパルス数を運転パルス数として、その値を設計段階又は工場出荷前に予め制御部14の記憶手段に設定し記憶させておき、運転時には前記パルス信号のカウント数と前記運転パルス数とを比べることにより移動手すり9の移動量が、傾斜部1cの距離だけ移動したことを判断することができる。
【0026】
図3は、本実施例における乗客コンベアの制御内容処理を示すフローチャートである。図3を用いて、本実施例の乗客コンベアの動作を以下説明する。
【0027】
図3において、乗客コンベア1が上昇運転の場合で説明すると、まず、乗客コンベア1の利用者がいない場合には、乗客コンベア1の運転を停止し、待機させておく(ステップS10)。次に、下階部利用者検出装置11が利用者を検出すると、制御部14はモータ7を起動させる信号を出力し、乗客コンベア1の運転を開始する(ステップS20、ステップS30)。下階部利用者検出装置11が利用者を検出しない場合には、乗客コンベア1の運転を待機させておく(ステップS10)。
【0028】
前記モータ7を起動させ、乗客コンベア1の運転を開始すると(ステップS30)、移動手すり9の移動も開始される。そこで、パルス信号発生装置13からの手すりパルス信号のカウントを開始する(ステップS40)。この手すりパルス信号のカウントにおいては、まず、制御部14は、パルス信号発生装置13からの信号の入力があるか否かを判定し(ステップS50)、手すりパルス信号の入力がある場合には、手すりパルス信号のカウント数を加算する(ステップS60)。一方、手すりパルス信号の入力がない場合には、手すりパルス信号の入力を待つ(ステップS50)。
【0029】
前記手すりパルス信号のカウント数を加算している間も(ステップS60)、下階部利用者検出装置11により別の利用者が乗口に接近している否かを検出する(ステップS70)。これは、別の利用者が乗口に接近している場合には、その接近している別の利用者を基準に乗客コンベア1の自動運転を制御するためである。
【0030】
下階部利用者検出装置11により別の利用者が検出されない場合には、予め制御部14に設定記憶された前記運転パルス数と、ステップS60で加算された手すりパルス信号のカウント数とを比較する(ステップS80)。そして、手すりパルス信号のカウント数P’が運転パルス数P以上である場合には、利用者が下階乗降部1aと上階乗降部1bを歩行する時間及び余裕時間のカウントを開始する(ステップS90)。一方、手すりパルス信号のカウント数P’が運転パルス数P未満である場合には、手すりパルス信号の入力を待ち(ステップS50)、手すりパルス信号のカウントを繰り返す。
【0031】
一方、前記ステップS70で下階部利用者検出装置11により別の利用者が検出された場合には、制御部14における手すりパルス信号カウント数をクリアし(ステップS100)、カウントを0からあらためて開始するようにして手すりパルス信号の入力を待つ(ステップS50)。
【0032】
利用者歩行時間と余裕時間のカウント(ステップ110)においては、利用者歩行時間と余裕時間として必要な合計時間は、設定値として制御部14内の記憶手段に記憶させておく。
【0033】
前記利用者歩行時間と余裕時間のカウントをしている間においても(ステップS110)、下階部利用者検出装置11により別の利用者が乗口に接近している否かを検出する(ステップS120)。下階部利用者検出装置11により別の利用者が検出されない場合には、利用者歩行時間と余裕時間のカウント時間が、あらかじめ制御部14に設定記憶させておいた必要な合計時間に達したか否かを判定する(ステップS130)。そして、この利用者歩行時間と余裕時間のカウント時間が必要な合計時間に達している場合には、調整用タイマのカウントを開始する(ステップS140)。一方、前記ステップ130で、利用者歩行時間と余裕時間のカウント時間が必要な合計時間に達していない場合には、ステップS110に戻り、利用者歩行時間と余裕時間のカウントを繰り返す。
【0034】
前記ステップS120で下階部利用者検出装置11により別の利用者が検出された場合には、歩行者利用時間と余裕時間のカウントをリセットし(ステップS150)、次いで制御部14における手すりパルス信号カウント数をクリアし(ステップS100)、手すりパルス信号のカウントを0からあらためて開始する(ステップS50)。
【0035】
ステップS140において調整用タイマのカウントを開始し、次いで調整用タイマのカウントしている間にも(ステップS160)、下階部利用者検出装置11により別の利用者が乗口に接近している否かを検出する(ステップS170)。ステップS170で下階部利用者検出装置11により別の利用者が検出されない場合には、調整用タイマのカウント時間が、あらかじめ制御部14に設定記憶させておいた設定時間に達したか否かを判定する(ステップS180)。そして、前記調整用タイマのカウント時間が前記設定時間に達している場合には、ステップS10に戻り、乗客コンベア1の運転を停止させて、乗客コンベア1を待機状態にする。
【0036】
一方、前記ステップS180で前記調整用タイマのカウント時間が前記設定時間に達していない場合には、ステップS160に戻り、調整用タイマのカウントを繰り返す。
【0037】
前記ステップS170で下階部利用者検出装置11により別の利用者が検出された場合には、調整用タイマのカウントをリセットし(ステップS190)、次いで利用者利用時間と余裕時間のカウントをリセットし(ステップS150)、次いで制御部14における手すりパルス信号カウント数をクリアし(ステップS100)、手すりパルス信号のカウントを0からあらためて開始するようにしてステップS50に戻る。
【0038】
以上述べた本実施例の制御部14による制御では、運転時間の設定における利用者が乗客コンベア1の傾斜部1cを移動する時間に関する設定を、移動手すり9の移動距離により設定する。乗客コンベア1の運転速度を変化させた場合でも、移動手すり9が乗口から降口まで移動する距離には変化がないため、利用者が乗客コンベア1の傾斜部1cを移動するときの移動手すりパルス信号のパルス回数は常に一定となる。また、下階乗降部1aと上階乗降部1bにおける利用者歩行時間と余裕時間も一定である。したがって、操作者が乗客コンベア1の運転速度を変更した場合や遠隔操作などで運転中に変速制御を行った場合、又は保守員により運転速度の初期設定を変更した場合でも、パルス信号発生装置13からのパルス信号のカウント数と運転パルス数とを比較して、前記パルス信号のカウントにより求められる移動手すりの移動量が一方の乗降口から他方の乗降口までの移動手すりの距離の値に達した後に乗客コンベア1の運転を停止させることにより、運転時間の見直しを必要とせず、常に最適な運転時間で、乗客コンベアの自動運転制御を行うことができる。
【0039】
このことにより、乗客コンベア1を必要な時間以上に長時間運転することを回避でき、また、運転速度の初期設定変更を行った場合の運転時間の再検討を必要とせず、省エネルギー効果の向上と検討手間の軽減、作業手間の軽減をすることができる。
【0040】
次に、図1及び図2に示した本実施例の乗客コンベア1においては、パルス信号発生装置13は、移動手すり9の速度検出装置に用いられているパルス発生手段と兼用させることができる。すなわち、特開2000−198658号公報、特開平10−36052号公報、特開平8−337382号公報、特開平10−17259号公報に示されるような、移動手すりの停止を検出する装置または移動手すりと踏段との不同期を検出する装置に使用される移動手すりの速度検出装置と兼用することができる。なお、図2のパルス信号発生装置13も、移動手すりの速度検出装置と兼用させたものを示している。
【0041】
このように、本実施例に従い、パルス信号発生装置13を、乗客コンベア1に既設されている移動手すり9の停止を検出する装置、又は移動手すり9と踏段3との不同期を検出する装置に使用される移動手すりの速度検出装置と兼用させることにより、本発明の制御を行ううえで装置要素を特別に追加する必要がなく、ソフトウェアのみで対応できるので、比較的安価な制御装置を提供することができる。
【0042】
(実施例2)
本発明の乗客コンベアの第二実施例について、以下説明する。本実施例においては、乗客コンベア1の階高Hの値を設定値として運転制御装置としての制御部14に設定し、その階高Hの値によって一方の乗降口から他方の乗降口までの移動手すりの距離の値を算出する。
【0043】
第二実施例の乗客コンベア1において、制御部14に設定する運転パルス数の設定方法について説明する。図4は、制御部14内部で処理する演算の内容を示す数式を示している。なお、主要回路及び装置の構成は、図1に示したものと同じである。
【0044】
制御部14に設定する運転パルス数の設定は、現場に設置される乗客コンベア1の一台ごとに傾斜部1cの距離におけるパルス数を計算し、そのパルス数をそのまま制御部14に設定し、記憶させてもよいが、以下に説明する方法でも設定することができる。
【0045】
運転パルス数を階高Hの数値に置き換えて、制御部14に設定する。傾斜角をθ、階高をHとすると、傾斜部1cの距離は、H・cosecθで算出できる。傾斜部1cの距離が、パルス信号発生装置13の検出片13aが取り付けられている押圧ローラー10bの何回転分に相当するかを算出すると、運転パルス数を求めることができる。
【0046】
この運転パルス数をPとすると、運転パルス数Pは、図4に示す階高設定時演算処理に記載の式となり、この演算処理を制御部14で行うことにより、運転パルス数Pを階高17の数値に置き換えて設定することができる。図4に示す階高設定時演算処理に用いられる値のうち、傾斜角θ、押圧ローラー10bの一回転におけるパルス発生数A及び押圧ローラー10bの半径rは、乗客コンベア1の一台ごとに変化する数値ではないため、確定要素としてシステム設計時にプログラムに登録して制御部14に記憶させておく。そうすると、実操業において不確定要素は階高Hのみとなり、乗客コンベア1の一台ごとに階高Hを設定すると、制御部14の内部で前述した階高設定時演算処理が行われ、運転パルス数Pを求めることができる。
【0047】
また、図4に示した階高設定時演算処理の代わりに、運転パルス数Pを移動手すり9の全長(周長)に置き換えて、制御部14に設定することもできる。
【0048】
すなわち、傾斜部1cの距離は、詳細にまで算出する必要はないので、無端状の移動手すり9の全長をLhとすると、傾斜部1cに相当する距離は、移動手すり9の全長の約半分弱の長さであるとすることができる。
【0049】
そのことから、傾斜部1cの距離は、一例として0.5・Lhとして、前記同様に傾斜部1cの距離が押圧ローラー10bの何回転分に相当するかを算出すると、運転パルス数Pが求められる。運転パルス数をPとすると、運転パルス数Pは、図5に示す手すりベルト長さ設定時演算処理に記載の式となり、この延在処理を制御部14で行うことにより、運転パルス数Pを移動手すり9の全長に置き換えて設定することができる。前述した階高設定時演算処理の場合と同様に、手すりベルト長さ設定時演算処理における不確定要素は移動手すりの全長Lhのみとなり、乗客コンベアの一台ごとに前記移動手すり9の全長Lhを設定すると、制御部14の内部で前述した移動手すり長さ設定時演算処理が行われ、運転パルス数Pを求めることができる。
【0050】
このように、階高Hの数値や移動手すり9の全長に置き換えて、運転パルス数Pを設定することにより、制御装置の設計手配時にその都度、運転パルス数を計算する必要がなくなる。また、簡単で分かりやすい設定になるため、設計手間の軽減や、誤設定の防止につながる。
【0051】
(実施例3)
次に本発明の乗客コンベアの第三実施例について説明する。乗客コンベア1は、現地搬入後に運転時間を調整することがある。この運転時間の調整をする場合の制御部14の制御について、本実施例では、利用者が一方の乗降口から他方の乗降口まで到達するのに必要な最低限の時間よりも増加させる設定にのみ変更可能とし、前記最低限の時間よりも減少させる設定には変更不能とする。なお、主要回路及び装置の構成は、図1に示したものと同じである。また、図3に示したフローチャートのうち、主としてステップS140〜ステップS180が本実施例に相当する。
【0052】
乗客コンベア1の運転時間について、運転パルス数のカウントに要する時間に利用者の歩行時間と余裕時間とを加えた時間を、その乗客コンベア1に対する最小設定値とし、現地搬入後に前記最小設定値は、運転時間を調整する上で変更できないような処理とする。
【0053】
かような現地搬入後の運転時間の調整は、図3のフローチャートのステップS140〜ステップS180に示す調整用タイマを設定することによって行う。調整用タイマは、運転時間の運転パルス数のカウントと、利用者の歩行時間及び余裕時間のカウントが終了するステップS130の後に、カウントを開始する(ステップS140)。調整用タイマのカウントが終了するステップS180で乗客コンベア1は待機状態となるように制御する。調整用タイマの初期値は0とし、設定値の増加のみ変更可能として、調整用タイマの操作では、前記最小設定値より運転時間を短くする調整はできないようにしている。
【0054】
かくして、現地で運転時間の調整を行う際に、誤って運転時間を前記最小設定値よりも短いほど極端に短く設定して、利用者が乗客コンベア1を利用中に乗客コンベアの運転が運転時間のタイムアップによって停止するおそれを未然に防ぐことができる。そのため、安全面をいっそう向上させた乗客コンベアを提供できる。
【0055】
(実施例4)
次に本発明の乗客コンベアの第四実施例について説明する。本実施例は、複数の踏段3を連結する踏段チェーン2に給油を行う自動給油装置の給油時間を移動手すり9の移動距離に基づいて制御するものである。なお、主要回路及び装置の構成は、図1に示したものと同様である。
【0056】
実施例1と同様のパルス信号発生装置13を備えた乗客コンベア1において、自動給油装置の給油1回に必要な給油時間を、踏段3が約1周回する時間とする。この場合、踏段3が1周回する距離を、移動手すり9の移動距離によって求め、踏段3が1周回する時間を判断する。
【0057】
踏段3の1周回する距離は、ガイドレール6の全長と駆動スプロケット4の半周分の長さと従動スプロケット5の半周分の長さとの和であるため、これらのガイドレール6の全長と駆動スプロケット4の半周分の長さと従動スプロケット5の半周分の長さと和の距離分、移動手すり9が移動する際に発生するパルス数を、給油パルス数P”として、あらかじめ制御部14に設定し、記憶させておく。
【0058】
本実施例の自動給油装置の制御処理の具体的内容を、図6に示すフローチャートに従って以下説明する。
【0059】
踏段チェーン2に給油を行うに当たっては、まず、自動給油装置を起動させ(ステップS210)、給油を開始すると、で移動手すり駆動装置10の押圧ローラー10bに取り付けられたパルス信号発生装置13からの手すりパルス信号のカウントを開始する(ステップS220)。この手すりパルス信号のカウントにおいては、まず、制御部14は、パルス信号発生装置13からの信号の入力があるか否かを判定し(ステップS230)、手すりパルス信号の入力がある場合には、手すりパルス信号のカウント数を加算し(ステップS240)、ステップS250に進む。一方、ステップS230で手すりパルス信号の入力がない場合には、手すりパルス信号の入力を待つ。
【0060】
前記ステップS250では、予め制御部14に設定記憶された前記給油パルス数P”と、ステップS240で加算された手すりパルス信号のカウント数とを比較する。そして、手すりパルス信号のカウント数P’が給油パルス数P”以上である場合には、自動給油装置による給油を停止させ(ステップS260)、終了する。
【0061】
このような制御を行うと、給油が開始される際の運転速度に関係なく、踏段3が1周回する分だけ給油をすることができるため、給油時間の設定を最低速運転で踏段が1周回する時間として設定した場合の過給油や、最高速運転で踏段が1周回する時間として設定した場合の給油不足を防ぐことができ、常に最適な給油時間で給油することができる。
【図面の簡単な説明】
【0062】
【図1】本発明の乗客コンベアの一実施例の構成図である。
【図2】パルス信号発生装置の一例を示す図である。
【図3】実施例における乗客コンベアの制御内容処理を示すフローチャートである。
【図4】制御部14内部で処理する階高設定時演算処理の内容を示す図である。
【図5】制御部14内部で処理する手すりベルト長さ設定時演算処理の内容を示す図である。
【図6】実施例における自動給油装置の制御処理の具体的内容を示すフローチャートである。
【符号の説明】
【0063】
1 乗客コンベア
3 踏段
9 移動手すり
10 移動手すり駆動装置
11 下階部利用者検出装置(利用者検出手段)
12 上階部利用者検出装置(利用者検出手段)
13 パルス信号発生装置(パルス信号発生手段)
14 制御部(運転制御手段)
H…階高
【特許請求の範囲】
【請求項1】
一方の乗降口と他方の乗降口との間を循環移動する複数の踏段と、
前記踏段と同期して前記踏段と同じ方向に循環移動する移動手すりと、
前記乗降口近傍に設けられ利用者が前記乗降口に接近したことを検出する利用者検出手段と、
前記移動手すりの所定移動量ごとにパルス信号を発生させるパルス信号発生手段と、
前記利用者検出手段からの利用者検出信号が入力されたときに前記踏段の駆動を開始させるとともに前記パルス信号発生手段からのパルス信号のカウントを開始して、前記パルス信号のカウントにより求められる移動手すりの移動量が一方の乗降口から他方の乗降口までの移動手すりの距離の値に達した後に前記踏段の駆動を停止させる運転制御手段と、
を備えることを特徴とする乗客コンベア。
【請求項2】
前記パルス発生手段が、移動手すりの速度検出装置に用いられているパルス発生手段であることを特徴とする請求項1記載の乗客コンベア。
【請求項3】
乗客コンベアの階高値を設定値として前記運転制御装置に設定し、その階高値によって一方の乗降口から他方の乗降口までの移動手すりの距離の値を算出することを特徴とする請求項1記載の乗客コンベア。
【請求項4】
乗客コンベアの移動手すりの全長を設定値として前記運転制御装置に設定し、その移動手すりの全長の値によって一方の乗降口から他方の乗降口までの移動手すりの距離の値を算出することを特徴とする請求項1記載の乗客コンベア。
【請求項5】
前記運転制御手段が、前記踏段の駆動を開始させてから停止させるまでの運転時間を調整可能であり、この運転時間の調整は、利用者が一方の乗降口から他方の乗降口まで到達するのに必要な最低限の時間よりも増加させる設定にのみ変更可能とし、前記最低限の時間よりも減少させる設定には変更不能としたものであることを特徴とする請求項1記載の乗客コンベア。
【請求項6】
パルス信号発生手段により発生されるパルス信号のカウントにより求められる移動手すりの移動量に基づいて、複数の踏段を連結する踏段チェーンに給油を行う自動給油装置を備えることを特徴とする請求項1記載の乗客コンベア。
【請求項1】
一方の乗降口と他方の乗降口との間を循環移動する複数の踏段と、
前記踏段と同期して前記踏段と同じ方向に循環移動する移動手すりと、
前記乗降口近傍に設けられ利用者が前記乗降口に接近したことを検出する利用者検出手段と、
前記移動手すりの所定移動量ごとにパルス信号を発生させるパルス信号発生手段と、
前記利用者検出手段からの利用者検出信号が入力されたときに前記踏段の駆動を開始させるとともに前記パルス信号発生手段からのパルス信号のカウントを開始して、前記パルス信号のカウントにより求められる移動手すりの移動量が一方の乗降口から他方の乗降口までの移動手すりの距離の値に達した後に前記踏段の駆動を停止させる運転制御手段と、
を備えることを特徴とする乗客コンベア。
【請求項2】
前記パルス発生手段が、移動手すりの速度検出装置に用いられているパルス発生手段であることを特徴とする請求項1記載の乗客コンベア。
【請求項3】
乗客コンベアの階高値を設定値として前記運転制御装置に設定し、その階高値によって一方の乗降口から他方の乗降口までの移動手すりの距離の値を算出することを特徴とする請求項1記載の乗客コンベア。
【請求項4】
乗客コンベアの移動手すりの全長を設定値として前記運転制御装置に設定し、その移動手すりの全長の値によって一方の乗降口から他方の乗降口までの移動手すりの距離の値を算出することを特徴とする請求項1記載の乗客コンベア。
【請求項5】
前記運転制御手段が、前記踏段の駆動を開始させてから停止させるまでの運転時間を調整可能であり、この運転時間の調整は、利用者が一方の乗降口から他方の乗降口まで到達するのに必要な最低限の時間よりも増加させる設定にのみ変更可能とし、前記最低限の時間よりも減少させる設定には変更不能としたものであることを特徴とする請求項1記載の乗客コンベア。
【請求項6】
パルス信号発生手段により発生されるパルス信号のカウントにより求められる移動手すりの移動量に基づいて、複数の踏段を連結する踏段チェーンに給油を行う自動給油装置を備えることを特徴とする請求項1記載の乗客コンベア。
【図1】



【図2】

【図3】
【図4】

【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−62767(P2006−62767A)
【公開日】平成18年3月9日(2006.3.9)
【国際特許分類】
【出願番号】特願2004−244039(P2004−244039)
【出願日】平成16年8月24日(2004.8.24)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成18年3月9日(2006.3.9)
【国際特許分類】
【出願日】平成16年8月24日(2004.8.24)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]