
燃料圧力制御装置

【課題】燃料圧力制御における過渡期の制御性能を改善する。
【解決手段】各種センサからエンジン運転状態としての負荷,回転速度,水温及び実燃圧(検出燃圧)を読み込み(S1)、負荷,回転速度及び水温に応じた目標燃圧を演算すると共に(S2)、燃料供給配管における燃圧を目標燃圧とするためのフィードフォワード操作量を演算する(S3)。また、目標燃圧に対して燃料ポンプを所定の特性で応答させるための規範燃圧を演算し(S4)、規範燃圧と検出燃圧との偏差をなくすフィードバック操作量を演算する(S5,6)。そして、検出燃圧及び回転速度に応じた平滑化係数を演算し(S7)、この平滑化係数を利用してフィードバック操作量を平滑化する(S8)。その後、フィードフォワード操作量と平滑化されたフィードバック操作量から燃料ポンプの操作量を演算し(S9)、この操作量に応じて燃料ポンプを制御する(S10)。
【解決手段】各種センサからエンジン運転状態としての負荷,回転速度,水温及び実燃圧(検出燃圧)を読み込み(S1)、負荷,回転速度及び水温に応じた目標燃圧を演算すると共に(S2)、燃料供給配管における燃圧を目標燃圧とするためのフィードフォワード操作量を演算する(S3)。また、目標燃圧に対して燃料ポンプを所定の特性で応答させるための規範燃圧を演算し(S4)、規範燃圧と検出燃圧との偏差をなくすフィードバック操作量を演算する(S5,6)。そして、検出燃圧及び回転速度に応じた平滑化係数を演算し(S7)、この平滑化係数を利用してフィードバック操作量を平滑化する(S8)。その後、フィードフォワード操作量と平滑化されたフィードバック操作量から燃料ポンプの操作量を演算し(S9)、この操作量に応じて燃料ポンプを制御する(S10)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、燃料圧力を制御する燃料圧力制御装置に関する。
【背景技術】
【0002】
燃料噴射弁に供給される燃料圧力が目標燃料圧力に近づくように、目標燃料圧力とセンサにより検出した実際の燃料圧力との偏差に基づいて燃料ポンプをフィードバック制御する燃料圧力制御装置が知られている。かかる燃料圧力制御装置においては、燃料噴射弁からの燃料噴射などに伴って燃料圧力に脈動が生じる。そして、燃料圧力の脈動を抑制するためのフィードバック制御で過大な制御信号(操作量)が出力され、例えば、消費電力の増加による燃費低下、駆動回路及びモータの発熱などを来たしてしまう。
【0003】
このため、特開2000−282937号公報(特許文献1)に記載されるように、センサにより検出した実際の燃料圧力に対してフィルタを適用して平滑化し、この値と目標燃料圧力との偏差に基づいて燃料ポンプをフィードバックする燃料圧力制御装置が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−282937号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、フィルタにより平滑化された燃料圧力は、実際の燃料圧力に対して位相が遅れるため、この値を燃料ポンプのフィードバック制御に用いると、過渡期の応答性及び収束性などの制御性能が損なわれるおそれがあった。
そこで、本発明は、従来技術の問題点に鑑み、過渡期の制御性能を改善した燃料圧力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
燃料圧力制御装置は、燃料供給配管を介して燃料ポンプから燃料噴射弁に供給される燃料の圧力が機関運転状態に応じた目標燃圧となるように、燃料ポンプの駆動を制御する。また、燃料圧力制御装置は、燃料供給配管における実際の燃料圧力が目標燃料圧力に近づくようにするフィードバック操作量を演算し、このフィードバック操作量をフィルタで平滑化する。そして、燃料圧力制御装置は、平滑化されたフィードバック操作量に基づいて、燃料ポンプの駆動をフィードバック制御する。
【発明の効果】
【0007】
センサにより検出した実際の燃料圧力が平滑化されないため、過渡期の応答性及び収束性などの制御性能を改善することができる。また、フィードバック操作量が平滑化されるため、フィードバック操作量が過大となることも抑制できる。
【図面の簡単な説明】
【0008】
【図1】燃料供給システムの一例を示す概略図である。
【図2】燃料圧力制御に係る機能ブロック図である。
【図3】フィードバック操作量を演算するPI制御の説明図である。
【図4】フィードバック操作量を平滑化するデジタルフィルタの説明図である。
【図5】燃料圧力制御処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付された図面を参照し、本発明を実施するための実施形態について詳述する。
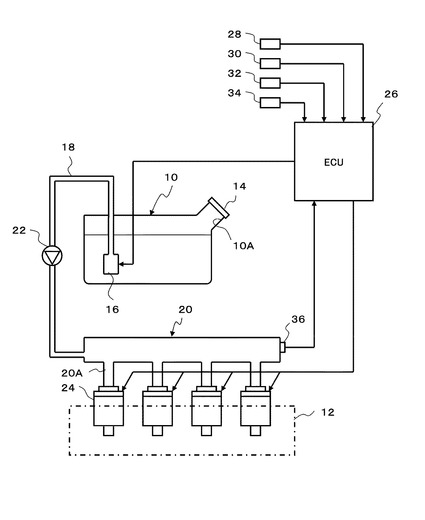
図1は、本実施形態を組み込んだ燃料供給システムの一例を示す。
燃料タンク10は、エンジン(内燃機関)12に供給されるガソリンなどの燃料を貯蔵するタンクであって、例えば、車両の後部座席の下などに配置される。燃料タンク10には、着脱可能な給油キャップ14により閉塞される給油口10Aが形成されており、給油キャップ14を取り外して給油口10Aから燃料が補給される。
【0010】
燃料タンク10の内部には、図示省略するブラケットを介して、電動式の燃料ポンプ16が取り付けられている。燃料ポンプ16は、燃料タンク10に貯蔵された燃料を吸込口から吸い込んで吐出口から吐き出す、例えば、タービン式のポンプであって、その吐出口に燃料パイプ18の一端が接続されている。
燃料パイプ18の他端は、燃料ギャラリーパイプ20に接続されている。燃料パイプ18には、燃料ポンプ16から燃料ギャラリーパイプ20へと向かう燃料の流れを通過させる一方、燃料ギャラリーパイプ20から燃料ポンプ16へと向かう燃料の流れ(逆流)を阻止する逆止弁22が配設されている。燃料ギャラリーパイプ20には、その延設方向に沿って気筒数(図示する燃料供給システムでは4気筒)と同数の噴射弁接続部20Aが形成されており、各噴射弁接続部20Aに燃料噴射弁24の燃料取入口が接続されている。
【0011】
燃料噴射弁24は、電磁コイルへの通電によって磁気吸引力が発生すると、スプリングによって閉弁方向に付勢されている弁体がリフトして開弁し、燃料を噴射する、電磁式の噴射弁である。燃料噴射弁24は、例えば、エンジン12の各気筒の吸気ポートに夫々設置され、各吸気ポート内に燃料を夫々噴射供給する。
ここで、燃料パイプ18及び燃料ギャラリーパイプ20は、燃料ポンプ16から燃料噴射弁24に燃料を供給する燃料供給配管の一例として挙げられる。
【0012】
マイクロコンピュータを内蔵した電子制御ユニット(ECU)26には、エンジン12の運転状態を検出する各種センサからの検出信号が入力される。各種センサとしては、負荷を検出する負荷センサ28,回転速度を検出する回転速度センサ30,冷却水温度(水温)を検出する水温センサ32,排気中の空燃比を検出する空燃比センサ34,燃料ギャラリーパイプ20における燃料圧力(燃圧)を検出する燃圧センサ36などが設けられている。ここで、エンジン12の負荷としては、例えば、吸気流量,吸気負圧,スロットル開度,過給圧力など、エンジン12のトルクと密接に関連する状態量を用いることができる。
【0013】
電子制御ユニット26は、燃圧センサ36により検出される実際の燃圧(検出燃圧)が目標燃圧に近づくように、燃料ポンプ16の通電制御デューティ(操作量)をフィードフォワード制御及びフィードバック制御することで、燃料ギャラリーパイプ20における燃圧を可変制御する。
また、電子制御ユニット26は、負荷センサ28,回転速度センサ30,水温センサ32,空燃比センサ34及び燃圧センサ36からの各出力信号に基づいて、目標空燃比の混合気を形成する燃料に見合った噴射パルス幅を演算する。そして、電子制御ユニット26は、各燃料噴射弁24に対して個別に、噴射パルス幅に相当する開弁制御パルスを適宜出力することで、燃料噴射弁24による燃料噴射量及び燃料噴射時期を制御する。このとき、電子制御ユニット26は、燃圧センサ36の検出燃圧において要求燃料量が噴射されるように、噴射パルス幅(噴射時間)を演算する。
【0014】
次に、電子制御ユニット26が実行する、燃料圧力制御について説明する。
電子制御ユニット26は、燃圧センサ36の検出燃圧を平滑化する代わりに、目標燃圧と検出燃圧との偏差に応じたフィードバック操作量を平滑化する。そして、電子制御ユニット26は、平滑化されたフィードバック操作量に基づいて、燃料ポンプ16の駆動をフィードバック制御する。
【0015】
このようにすれば、燃圧センサ36の検出燃圧が平滑化されないため、その位相が遅れることがなく、過渡期の応答性及び収束性などの制御性能を改善することができる。また、フィードバック制御量が平滑化されるため、フィードバック制御量が過大となることが抑制され、例えば、消費電力の増加による燃費低下、駆動回路及び燃料ポンプ16の発熱などを抑制することもできる。
【0016】
ところで、燃圧の脈動因子は、燃料ポンプ16の駆動によるものと、燃料噴射弁24の駆動によるものと、に大別できる。燃料ポンプ16の駆動による脈動因子は、ポンプ回転速度によるものと、PWM(Pulse Width Modulation)周波数によるものと、に更に細分化できる。また、燃料噴射弁24の駆動による脈動因子は、噴射パルス幅によるものと、実燃圧によるものと、噴射気筒によるものと、噴射間隔によるものと、に更に細分化できる。
【0017】
各脈動因子について、燃圧脈動の振幅及び周波数の感度解析を行うと、実燃圧が燃圧脈動の振幅に影響が大きく、また、噴射間隔が燃圧脈動の周波数に影響が大きいことが解析できた。即ち、燃料ポンプ16のポンプ回転速度及びPWM周波数による脈動因子は、燃料パイプ18により減衰するため、燃圧脈動には影響が小さい。また、燃料噴射弁24の噴射パルス幅及び噴射気筒による脈動要因は、低感度であるため、燃圧脈動には影響が小さい。
【0018】
従って、実燃圧又は噴射間隔に応じて、後述するように、フィルタによる平滑化のゲイン特性又はカットオフ周波数特性を切り換えることで、過渡期の制御性能を改善する効果の実効を図ることができる。
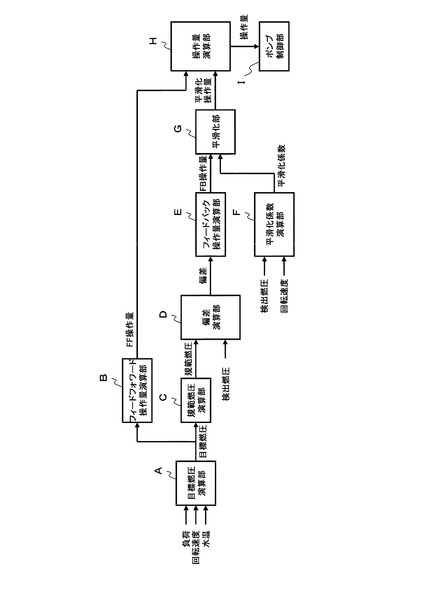
電子制御ユニット26は、ROM(Read Only Memory)などのフラッシュメモリに記録された制御プログラムを実行することで、図2に示すように、目標燃圧演算部A,フィードフォワード操作量演算部B,規範燃圧演算部C,偏差演算部D,フィードバック操作量演算部E,平滑化係数演算部F,平滑化部G,操作量演算部H及びポンプ制御部Iを夫々具現化する。
【0019】
ここで、規範燃圧演算部Cが規範燃料圧力演算手段の一例、偏差演算部D及びフィードバック操作量演算部Eが操作量演算手段の一例、平滑化係数演算部F及び平滑化部Gが平滑化手段の一例、ポンプ制御部Iが制御手段の一例として挙げられる。
目標燃圧演算部Aは、エンジン運転状態としての負荷,回転速度及び水温などに基づいて、目標燃圧を演算する。
【0020】
フィードフォワード操作量演算部Bは、目標燃圧に対してデジタルフィルタ、例えば、IIR(Infinite Impulse Response)フィルタを適用することで、高応答性を発揮するフィードフォワード操作量を演算する。
規範燃圧演算部Cは、目標燃圧に対してデジタルフィルタを適用することで、燃料ポンプ16を所定の特性で応答させるための規範燃圧を演算する。規範燃圧を演算する理由としては、規範燃圧によって燃圧速度変化を規定することが可能となり、燃圧変化による空燃比の変化が抑制されることから、排気エミッションの低下を抑制することができるためである。
【0021】
偏差演算部Dは、規範燃圧と検出燃圧との偏差(規範燃圧―検出燃圧)を演算する。
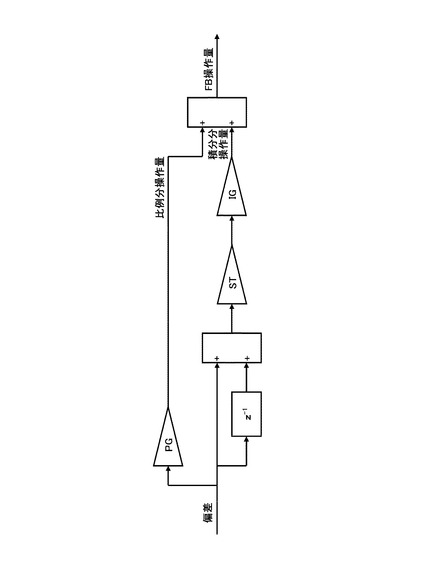
フィードバック操作量演算部Eは、偏差に対して、図3に示すようなPI制御を施すことで、その偏差がなくなるようにするためのフィードバック操作量を演算する。ここで、図3において、「PG」は比例ゲイン、「z-1」は1サンプル時前の偏差、「ST」は制御周期、「IG」は積分ゲインを示す。
【0022】
平滑化係数演算部Fは、検出燃圧及び回転速度に基づいて、フィードバック操作量をフィルタで平滑化するための平滑化係数、具体的には、デジタルフィルタの分母係数及び分子係数を演算する。ここで、回転速度は、燃料噴射弁24の噴射間隔と密接に関連する状態量であって、この状態量に応じて噴射間隔を把握することができる。なお、平滑化係数の詳細については後述する。
【0023】
平滑化部Gは、平滑化係数を適用したデジタルフィルタにより、フィードバック操作量を平滑化した平滑化操作量を演算する。
操作量演算部Hは、フィードフォワード操作量及び平滑化操作量に基づいて、燃料ポンプ16を制御するための操作量を演算する。具体的には、操作量演算部Hは、フィードフォワード操作量と平滑化操作量とを加算し、その加算値を操作量とする。
【0024】
ポンプ制御部Iは、燃料ポンプ16の操作量に基づいて、燃料ポンプ16を制御する。なお、ポンプ制御部Iは、フィードフォワード制御とフィードバック制御とを明確に区別して、燃料ポンプ16を制御してもよい。
ここで、フィードバック操作量を平滑化するデジタルフィルタの平滑化係数及びその演算方法の一例について説明する。
【0025】
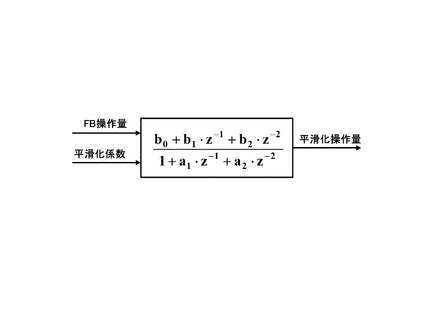
フィードバック操作量を平滑化するデジタルフィルタは、図4に示すように、分母係数a1及びa2、分子係数b0,b1及びb2により定義される。デジタルフィルタにおける変数zは、遅延演算子(遅延要素)を示し、その上付き添え字n(−1又は−2)は、nサンプル時前の信号値を示している。また、分子係数b0は、定数である。
平滑化係数である分母係数及び分子係数は、前述したように、検出燃圧(実燃圧)又は回転速度(噴射間隔)に応じて、次のように演算される。
[実燃圧に応じた平滑化係数]
実燃圧が所定圧力以上の高圧領域では、燃圧の脈動振幅が大きく、かつ、その後の燃圧変化が降圧である可能性が高いため、フィルタのゲイン特性を強めることで、過大な操作量によるフィードバック制御が行われることを抑制する。一方、実燃圧が所定圧力未満の低圧領域では、燃圧の脈動振幅が小さく、かつ、その後の燃圧変化が昇圧である可能性が高いため、フィルタのゲイン特性を弱めることで、過渡期の制御性能を改善する。要するに、実燃圧が高くなるほど、フィルタのゲイン特性を強くする。
【0026】
フィルタのゲイン特性は、具体的には、次のいずれかの方法で変化させる。
(1)フィルタを有効又は無効に切り換える
実燃圧が高圧領域にあるときには、デジタルフィルタが有効になるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、実燃圧が低圧領域にあるときには、デジタルフィルタが無効になるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に0(ゼロ)を夫々設定する。
(2)フィルタの次数を変化させる
実燃圧が高圧領域にあるときには、デジタルフィルタの次数が2次になるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、実燃圧が低圧領域にあるときには、デジタルフィルタの次数が1次になるように、その分母係数a1及びa2、並びに、分子係数b2に0(ゼロ)を夫々設定する。
(3)フィルタの減衰係数を変化させる
実燃圧が高圧領域にあるときには、デジタルフィルタの減衰係数が大きくなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、実燃圧が低圧領域にあるときには、デジタルフィルタの減衰係数が小さくなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。
[噴射間隔に応じた平滑化係数]
噴射間隔が所定間隔より短いときには、燃圧の脈動周波数が大きいため、フィルタのカットオフ周波数特性を高くすることで、過大なフィードバック制御が行われることを抑制する。一方、噴射間隔が所定間隔より長いときには、燃圧の脈動周波数が小さいため、フィルタのカットオフ周波数特性を低くすることで、過渡期の制御性能を改善する。要するに、噴射間隔が短くなるほど、フィルタのカットオフ周波数特性を高くする。
【0027】
具体的には、噴射間隔に関連する回転速度が所定速度以上のとき(噴射間隔:短い)ときには、デジタルフィルタのカットオフ周波数特性が高くなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、噴射間隔に関連する回転速度が所定速度未満のとき(噴射間隔:長い)ときには、デジタルフィルタのカットオフ周波数特性が低くなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。
【0028】
なお、フィルタのゲイン特性及びカットオフ周波数特性は、燃圧が高圧領域若しくは低圧領域、又は、噴射間隔が短い若しくは長いかの2段階に限らず、線形又は非線形で連続的に変化する特性、3段階以上の圧力領域又は噴射間隔でステップ的に変化させるようにしてもよい。また、デジタルフィルタは、IIRフィルタに限らず、他の公知のフィルタを適用してもよい。さらに、規範燃圧演算部Cを設けず、偏差演算部Dは、目標燃圧演算部Aが演算した目標演算部と検出燃圧との偏差を演算するようにしてもよい。
【0029】
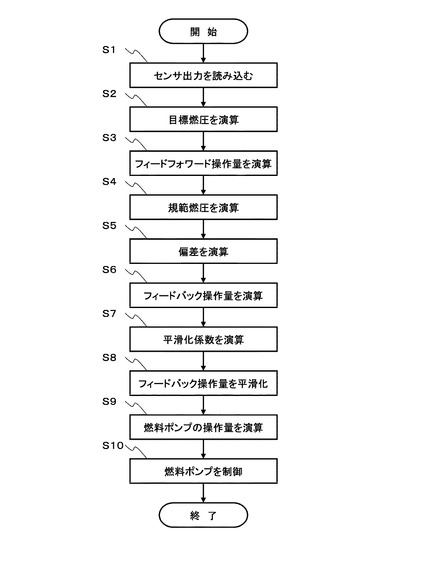
図5は、イグニッションスイッチがオンになったことを契機として、電子制御ユニット26の目標燃圧演算部A,フィードフォワード操作量演算部B,規範燃圧演算部C,偏差演算部D,フィードバック操作量演算部E,平滑化係数演算部F,平滑化部G,操作量演算部H及びポンプ制御部Iが所定時間ごとに繰り返し実行する燃料圧力制御処理の一例を示す。なお、所定時間としては、エンジン運転状態を検出する各種センサのサンプリング時間とすればよい。
【0030】
ステップ1(図では「S1」と略記する。以下同様。)では、目標燃圧演算部A,偏差演算部D及び平滑化係数演算部Fが各種センサからの出力信号を読み込む。即ち、目標燃圧演算部Aは、負荷センサ28,回転速度センサ30及び水温センサ32から、エンジン運転状態としての負荷,回転速度及び水温を夫々読み込む。偏差演算部Dは、燃圧センサ36の検出燃圧を読み込む。平滑化係数演算部Fは、回転速度センサ30から回転速度を読み込むと共に、燃圧センサ36の検出燃圧を読み込む。
【0031】
ステップ2では、目標燃圧演算部Aが、エンジン運転状態としての負荷,回転速度及び水温に基づいて、機関運転状態に応じた目標燃圧を演算する。ここで、目標燃圧は、例えば、エンジン12の負荷,回転速度及び水温に対応した目標燃圧が設定されたマップを参照して演算すればよい。
ステップ3では、フィードフォワード演算部Bが、目標燃圧に対して、例えば、所定特性を有するデジタルフィルタを適用することで、燃料ギャラリーパイプ20における燃圧を目標燃圧とするためのフィードフォワード操作量を演算する。
【0032】
ステップ4では、規範燃圧演算部Cが、目標燃圧に対して、例えば、所定特性を有するデジタルフィルタを適用することで、燃料ポンプ16を所定の特性で応答させるための規範燃圧を演算する。
ステップ5では、偏差演算部Dが、規範燃圧から検出燃圧を減算することで、規範燃圧と検出燃圧との偏差を演算する。
【0033】
ステップ6では、フィードバック操作量演算部Eが、偏差に対して、例えば、所定特性を有するデジタルフィルタを適用することで、その偏差がなくなるようにするフィードバック操作量を演算する。
ステップ7では、平滑化係数演算部Fが、前述した方法で、検出燃圧又は回転速度(噴射間隔)に基づいて、フィルタのゲイン特性又はカットオフ周波数特性を変化させるための平滑化係数、要するに、デジタルフィルタの分母係数及び分子係数を演算する。
【0034】
ステップ8では、平滑化部Gが、デジタルフィルタに平滑化係数を代入して、フィードバック操作量を平滑化した平滑化操作量を演算する。
ステップ9では、操作量演算部Hが、フィードフォーワード操作量と平滑化操作量とを加算した、燃料ポンプ16の操作量を演算する。
ステップ10では、ポンプ制御部Iが、燃料ポンプ16の操作量に基づいて、燃料ポンプ16を制御する。
【0035】
このような燃料供給システムによれば、エンジン運転状態としての負荷,回転速度及び水温に応じた目標燃圧が演算され、燃料ギャラリーパイプ20における燃圧を目標燃圧とするためのフィードフォワード操作量が演算される。また、エンジン運転状態に応じた目標燃圧に対して、燃料ポンプ16を所定の特性で応答させるための規範燃圧が演算され、規範燃圧と検出燃圧との偏差をなくすようにするフィードバック操作量が演算される。
【0036】
そして、検出燃圧又は回転速度に応じた平滑化係数を代入したデジタルフィルタにより、フィードバック操作量を平滑化した平滑化操作量を演算し、フィードバック操作量と平滑化操作量との加算値に応じて燃料ポンプ16が制御される。このとき、平滑化係数は、過大なフィードバック制御を抑制、又は、過渡期の制御性能を改善するように、フィルタのゲイン特性又はカットオフ周波数特性を演算する。
【0037】
従って、燃圧脈動の振幅及び周波数と密接に関連する実燃圧又は噴射間隔に応じて、フィルタのゲイン特性又はカットオフ周波数特性が動的に変化することから、過大なフィードバック制御の抑制と過渡期の制御性能を両立させることができる。
ここで、前記実施形態から把握し得る請求項以外の技術的思想について、以下に効果と共に記載する。
【0038】
(イ)前記平滑化手段は、前記フィルタを有効又は無効に切り換えることで、前記フィルタのゲイン特性を変化させることを特徴とする請求項2に記載の燃料圧力制御装置。
この発明によれば、フィルタを有効又は無効に切り換えることで、フィルタのゲイン特性を変化させることができる。
(ロ)前記平滑化手段は、前記フィルタの次数を変化させることで、前記フィルタのゲイン特性を変化させることを特徴とする請求項2に記載の燃料圧力制御装置。
この発明によれば、フィルタの次数を変化させることで、フィルタのゲイン特性を変化させることができる。
(ハ)前記平滑化手段は、前記フィルタの減衰係数を変化させることで、前記フィルタのゲイン特性を変化させることを特徴とする請求項2に記載の燃料圧力制御装置。
この発明によれば、フィルタの減衰係数を変化させることで、フィルタのゲイン特性を変化させることができる。
(ニ)前記目標燃料圧力に対して、前記燃料ポンプを所定の特性で応答させるための規範燃料圧力を演算する規範燃料圧力演算手段を更に有し、前記操作量演算手段は、前記燃料配管における実際の燃料圧力が前記規範燃料圧力に近づくようにするフィードバック操作量を演算することを特徴とする請求項1〜請求項3、(イ)〜(ハ)のいずれか1つに記載の燃料圧力制御装置。
【0039】
この発明によれば、燃料ポンプを所定の特性で応答させることができる。また、排気エミッションの低下を抑制することもできる。
【符号の説明】
【0040】
12 エンジン
16 燃料ポンプ
18 燃料パイプ
20 燃料ギャラリーパイプ
24 燃料噴射弁
26 電子制御ユニット
30 回転速度センサ
36 燃圧センサ
A 目標燃圧演算部
B フィードフォワード操作量演算部
C 規範燃圧演算部
D 偏差演算部
E フィードバック操作量演算部
F 平滑化係数演算部
G 平滑化部
H 操作量演算部
I ポンプ制御部
【技術分野】
【0001】
本発明は、燃料圧力を制御する燃料圧力制御装置に関する。
【背景技術】
【0002】
燃料噴射弁に供給される燃料圧力が目標燃料圧力に近づくように、目標燃料圧力とセンサにより検出した実際の燃料圧力との偏差に基づいて燃料ポンプをフィードバック制御する燃料圧力制御装置が知られている。かかる燃料圧力制御装置においては、燃料噴射弁からの燃料噴射などに伴って燃料圧力に脈動が生じる。そして、燃料圧力の脈動を抑制するためのフィードバック制御で過大な制御信号(操作量)が出力され、例えば、消費電力の増加による燃費低下、駆動回路及びモータの発熱などを来たしてしまう。
【0003】
このため、特開2000−282937号公報(特許文献1)に記載されるように、センサにより検出した実際の燃料圧力に対してフィルタを適用して平滑化し、この値と目標燃料圧力との偏差に基づいて燃料ポンプをフィードバックする燃料圧力制御装置が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−282937号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、フィルタにより平滑化された燃料圧力は、実際の燃料圧力に対して位相が遅れるため、この値を燃料ポンプのフィードバック制御に用いると、過渡期の応答性及び収束性などの制御性能が損なわれるおそれがあった。
そこで、本発明は、従来技術の問題点に鑑み、過渡期の制御性能を改善した燃料圧力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
燃料圧力制御装置は、燃料供給配管を介して燃料ポンプから燃料噴射弁に供給される燃料の圧力が機関運転状態に応じた目標燃圧となるように、燃料ポンプの駆動を制御する。また、燃料圧力制御装置は、燃料供給配管における実際の燃料圧力が目標燃料圧力に近づくようにするフィードバック操作量を演算し、このフィードバック操作量をフィルタで平滑化する。そして、燃料圧力制御装置は、平滑化されたフィードバック操作量に基づいて、燃料ポンプの駆動をフィードバック制御する。
【発明の効果】
【0007】
センサにより検出した実際の燃料圧力が平滑化されないため、過渡期の応答性及び収束性などの制御性能を改善することができる。また、フィードバック操作量が平滑化されるため、フィードバック操作量が過大となることも抑制できる。
【図面の簡単な説明】
【0008】
【図1】燃料供給システムの一例を示す概略図である。
【図2】燃料圧力制御に係る機能ブロック図である。
【図3】フィードバック操作量を演算するPI制御の説明図である。
【図4】フィードバック操作量を平滑化するデジタルフィルタの説明図である。
【図5】燃料圧力制御処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付された図面を参照し、本発明を実施するための実施形態について詳述する。
図1は、本実施形態を組み込んだ燃料供給システムの一例を示す。
燃料タンク10は、エンジン(内燃機関)12に供給されるガソリンなどの燃料を貯蔵するタンクであって、例えば、車両の後部座席の下などに配置される。燃料タンク10には、着脱可能な給油キャップ14により閉塞される給油口10Aが形成されており、給油キャップ14を取り外して給油口10Aから燃料が補給される。
【0010】
燃料タンク10の内部には、図示省略するブラケットを介して、電動式の燃料ポンプ16が取り付けられている。燃料ポンプ16は、燃料タンク10に貯蔵された燃料を吸込口から吸い込んで吐出口から吐き出す、例えば、タービン式のポンプであって、その吐出口に燃料パイプ18の一端が接続されている。
燃料パイプ18の他端は、燃料ギャラリーパイプ20に接続されている。燃料パイプ18には、燃料ポンプ16から燃料ギャラリーパイプ20へと向かう燃料の流れを通過させる一方、燃料ギャラリーパイプ20から燃料ポンプ16へと向かう燃料の流れ(逆流)を阻止する逆止弁22が配設されている。燃料ギャラリーパイプ20には、その延設方向に沿って気筒数(図示する燃料供給システムでは4気筒)と同数の噴射弁接続部20Aが形成されており、各噴射弁接続部20Aに燃料噴射弁24の燃料取入口が接続されている。
【0011】
燃料噴射弁24は、電磁コイルへの通電によって磁気吸引力が発生すると、スプリングによって閉弁方向に付勢されている弁体がリフトして開弁し、燃料を噴射する、電磁式の噴射弁である。燃料噴射弁24は、例えば、エンジン12の各気筒の吸気ポートに夫々設置され、各吸気ポート内に燃料を夫々噴射供給する。
ここで、燃料パイプ18及び燃料ギャラリーパイプ20は、燃料ポンプ16から燃料噴射弁24に燃料を供給する燃料供給配管の一例として挙げられる。
【0012】
マイクロコンピュータを内蔵した電子制御ユニット(ECU)26には、エンジン12の運転状態を検出する各種センサからの検出信号が入力される。各種センサとしては、負荷を検出する負荷センサ28,回転速度を検出する回転速度センサ30,冷却水温度(水温)を検出する水温センサ32,排気中の空燃比を検出する空燃比センサ34,燃料ギャラリーパイプ20における燃料圧力(燃圧)を検出する燃圧センサ36などが設けられている。ここで、エンジン12の負荷としては、例えば、吸気流量,吸気負圧,スロットル開度,過給圧力など、エンジン12のトルクと密接に関連する状態量を用いることができる。
【0013】
電子制御ユニット26は、燃圧センサ36により検出される実際の燃圧(検出燃圧)が目標燃圧に近づくように、燃料ポンプ16の通電制御デューティ(操作量)をフィードフォワード制御及びフィードバック制御することで、燃料ギャラリーパイプ20における燃圧を可変制御する。
また、電子制御ユニット26は、負荷センサ28,回転速度センサ30,水温センサ32,空燃比センサ34及び燃圧センサ36からの各出力信号に基づいて、目標空燃比の混合気を形成する燃料に見合った噴射パルス幅を演算する。そして、電子制御ユニット26は、各燃料噴射弁24に対して個別に、噴射パルス幅に相当する開弁制御パルスを適宜出力することで、燃料噴射弁24による燃料噴射量及び燃料噴射時期を制御する。このとき、電子制御ユニット26は、燃圧センサ36の検出燃圧において要求燃料量が噴射されるように、噴射パルス幅(噴射時間)を演算する。
【0014】
次に、電子制御ユニット26が実行する、燃料圧力制御について説明する。
電子制御ユニット26は、燃圧センサ36の検出燃圧を平滑化する代わりに、目標燃圧と検出燃圧との偏差に応じたフィードバック操作量を平滑化する。そして、電子制御ユニット26は、平滑化されたフィードバック操作量に基づいて、燃料ポンプ16の駆動をフィードバック制御する。
【0015】
このようにすれば、燃圧センサ36の検出燃圧が平滑化されないため、その位相が遅れることがなく、過渡期の応答性及び収束性などの制御性能を改善することができる。また、フィードバック制御量が平滑化されるため、フィードバック制御量が過大となることが抑制され、例えば、消費電力の増加による燃費低下、駆動回路及び燃料ポンプ16の発熱などを抑制することもできる。
【0016】
ところで、燃圧の脈動因子は、燃料ポンプ16の駆動によるものと、燃料噴射弁24の駆動によるものと、に大別できる。燃料ポンプ16の駆動による脈動因子は、ポンプ回転速度によるものと、PWM(Pulse Width Modulation)周波数によるものと、に更に細分化できる。また、燃料噴射弁24の駆動による脈動因子は、噴射パルス幅によるものと、実燃圧によるものと、噴射気筒によるものと、噴射間隔によるものと、に更に細分化できる。
【0017】
各脈動因子について、燃圧脈動の振幅及び周波数の感度解析を行うと、実燃圧が燃圧脈動の振幅に影響が大きく、また、噴射間隔が燃圧脈動の周波数に影響が大きいことが解析できた。即ち、燃料ポンプ16のポンプ回転速度及びPWM周波数による脈動因子は、燃料パイプ18により減衰するため、燃圧脈動には影響が小さい。また、燃料噴射弁24の噴射パルス幅及び噴射気筒による脈動要因は、低感度であるため、燃圧脈動には影響が小さい。
【0018】
従って、実燃圧又は噴射間隔に応じて、後述するように、フィルタによる平滑化のゲイン特性又はカットオフ周波数特性を切り換えることで、過渡期の制御性能を改善する効果の実効を図ることができる。
電子制御ユニット26は、ROM(Read Only Memory)などのフラッシュメモリに記録された制御プログラムを実行することで、図2に示すように、目標燃圧演算部A,フィードフォワード操作量演算部B,規範燃圧演算部C,偏差演算部D,フィードバック操作量演算部E,平滑化係数演算部F,平滑化部G,操作量演算部H及びポンプ制御部Iを夫々具現化する。
【0019】
ここで、規範燃圧演算部Cが規範燃料圧力演算手段の一例、偏差演算部D及びフィードバック操作量演算部Eが操作量演算手段の一例、平滑化係数演算部F及び平滑化部Gが平滑化手段の一例、ポンプ制御部Iが制御手段の一例として挙げられる。
目標燃圧演算部Aは、エンジン運転状態としての負荷,回転速度及び水温などに基づいて、目標燃圧を演算する。
【0020】
フィードフォワード操作量演算部Bは、目標燃圧に対してデジタルフィルタ、例えば、IIR(Infinite Impulse Response)フィルタを適用することで、高応答性を発揮するフィードフォワード操作量を演算する。
規範燃圧演算部Cは、目標燃圧に対してデジタルフィルタを適用することで、燃料ポンプ16を所定の特性で応答させるための規範燃圧を演算する。規範燃圧を演算する理由としては、規範燃圧によって燃圧速度変化を規定することが可能となり、燃圧変化による空燃比の変化が抑制されることから、排気エミッションの低下を抑制することができるためである。
【0021】
偏差演算部Dは、規範燃圧と検出燃圧との偏差(規範燃圧―検出燃圧)を演算する。
フィードバック操作量演算部Eは、偏差に対して、図3に示すようなPI制御を施すことで、その偏差がなくなるようにするためのフィードバック操作量を演算する。ここで、図3において、「PG」は比例ゲイン、「z-1」は1サンプル時前の偏差、「ST」は制御周期、「IG」は積分ゲインを示す。
【0022】
平滑化係数演算部Fは、検出燃圧及び回転速度に基づいて、フィードバック操作量をフィルタで平滑化するための平滑化係数、具体的には、デジタルフィルタの分母係数及び分子係数を演算する。ここで、回転速度は、燃料噴射弁24の噴射間隔と密接に関連する状態量であって、この状態量に応じて噴射間隔を把握することができる。なお、平滑化係数の詳細については後述する。
【0023】
平滑化部Gは、平滑化係数を適用したデジタルフィルタにより、フィードバック操作量を平滑化した平滑化操作量を演算する。
操作量演算部Hは、フィードフォワード操作量及び平滑化操作量に基づいて、燃料ポンプ16を制御するための操作量を演算する。具体的には、操作量演算部Hは、フィードフォワード操作量と平滑化操作量とを加算し、その加算値を操作量とする。
【0024】
ポンプ制御部Iは、燃料ポンプ16の操作量に基づいて、燃料ポンプ16を制御する。なお、ポンプ制御部Iは、フィードフォワード制御とフィードバック制御とを明確に区別して、燃料ポンプ16を制御してもよい。
ここで、フィードバック操作量を平滑化するデジタルフィルタの平滑化係数及びその演算方法の一例について説明する。
【0025】
フィードバック操作量を平滑化するデジタルフィルタは、図4に示すように、分母係数a1及びa2、分子係数b0,b1及びb2により定義される。デジタルフィルタにおける変数zは、遅延演算子(遅延要素)を示し、その上付き添え字n(−1又は−2)は、nサンプル時前の信号値を示している。また、分子係数b0は、定数である。
平滑化係数である分母係数及び分子係数は、前述したように、検出燃圧(実燃圧)又は回転速度(噴射間隔)に応じて、次のように演算される。
[実燃圧に応じた平滑化係数]
実燃圧が所定圧力以上の高圧領域では、燃圧の脈動振幅が大きく、かつ、その後の燃圧変化が降圧である可能性が高いため、フィルタのゲイン特性を強めることで、過大な操作量によるフィードバック制御が行われることを抑制する。一方、実燃圧が所定圧力未満の低圧領域では、燃圧の脈動振幅が小さく、かつ、その後の燃圧変化が昇圧である可能性が高いため、フィルタのゲイン特性を弱めることで、過渡期の制御性能を改善する。要するに、実燃圧が高くなるほど、フィルタのゲイン特性を強くする。
【0026】
フィルタのゲイン特性は、具体的には、次のいずれかの方法で変化させる。
(1)フィルタを有効又は無効に切り換える
実燃圧が高圧領域にあるときには、デジタルフィルタが有効になるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、実燃圧が低圧領域にあるときには、デジタルフィルタが無効になるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に0(ゼロ)を夫々設定する。
(2)フィルタの次数を変化させる
実燃圧が高圧領域にあるときには、デジタルフィルタの次数が2次になるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、実燃圧が低圧領域にあるときには、デジタルフィルタの次数が1次になるように、その分母係数a1及びa2、並びに、分子係数b2に0(ゼロ)を夫々設定する。
(3)フィルタの減衰係数を変化させる
実燃圧が高圧領域にあるときには、デジタルフィルタの減衰係数が大きくなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、実燃圧が低圧領域にあるときには、デジタルフィルタの減衰係数が小さくなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。
[噴射間隔に応じた平滑化係数]
噴射間隔が所定間隔より短いときには、燃圧の脈動周波数が大きいため、フィルタのカットオフ周波数特性を高くすることで、過大なフィードバック制御が行われることを抑制する。一方、噴射間隔が所定間隔より長いときには、燃圧の脈動周波数が小さいため、フィルタのカットオフ周波数特性を低くすることで、過渡期の制御性能を改善する。要するに、噴射間隔が短くなるほど、フィルタのカットオフ周波数特性を高くする。
【0027】
具体的には、噴射間隔に関連する回転速度が所定速度以上のとき(噴射間隔:短い)ときには、デジタルフィルタのカットオフ周波数特性が高くなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。一方、噴射間隔に関連する回転速度が所定速度未満のとき(噴射間隔:長い)ときには、デジタルフィルタのカットオフ周波数特性が低くなるように、その分母係数a1及びa2、並びに、分子係数b1及びb2に所定値を夫々設定する。
【0028】
なお、フィルタのゲイン特性及びカットオフ周波数特性は、燃圧が高圧領域若しくは低圧領域、又は、噴射間隔が短い若しくは長いかの2段階に限らず、線形又は非線形で連続的に変化する特性、3段階以上の圧力領域又は噴射間隔でステップ的に変化させるようにしてもよい。また、デジタルフィルタは、IIRフィルタに限らず、他の公知のフィルタを適用してもよい。さらに、規範燃圧演算部Cを設けず、偏差演算部Dは、目標燃圧演算部Aが演算した目標演算部と検出燃圧との偏差を演算するようにしてもよい。
【0029】
図5は、イグニッションスイッチがオンになったことを契機として、電子制御ユニット26の目標燃圧演算部A,フィードフォワード操作量演算部B,規範燃圧演算部C,偏差演算部D,フィードバック操作量演算部E,平滑化係数演算部F,平滑化部G,操作量演算部H及びポンプ制御部Iが所定時間ごとに繰り返し実行する燃料圧力制御処理の一例を示す。なお、所定時間としては、エンジン運転状態を検出する各種センサのサンプリング時間とすればよい。
【0030】
ステップ1(図では「S1」と略記する。以下同様。)では、目標燃圧演算部A,偏差演算部D及び平滑化係数演算部Fが各種センサからの出力信号を読み込む。即ち、目標燃圧演算部Aは、負荷センサ28,回転速度センサ30及び水温センサ32から、エンジン運転状態としての負荷,回転速度及び水温を夫々読み込む。偏差演算部Dは、燃圧センサ36の検出燃圧を読み込む。平滑化係数演算部Fは、回転速度センサ30から回転速度を読み込むと共に、燃圧センサ36の検出燃圧を読み込む。
【0031】
ステップ2では、目標燃圧演算部Aが、エンジン運転状態としての負荷,回転速度及び水温に基づいて、機関運転状態に応じた目標燃圧を演算する。ここで、目標燃圧は、例えば、エンジン12の負荷,回転速度及び水温に対応した目標燃圧が設定されたマップを参照して演算すればよい。
ステップ3では、フィードフォワード演算部Bが、目標燃圧に対して、例えば、所定特性を有するデジタルフィルタを適用することで、燃料ギャラリーパイプ20における燃圧を目標燃圧とするためのフィードフォワード操作量を演算する。
【0032】
ステップ4では、規範燃圧演算部Cが、目標燃圧に対して、例えば、所定特性を有するデジタルフィルタを適用することで、燃料ポンプ16を所定の特性で応答させるための規範燃圧を演算する。
ステップ5では、偏差演算部Dが、規範燃圧から検出燃圧を減算することで、規範燃圧と検出燃圧との偏差を演算する。
【0033】
ステップ6では、フィードバック操作量演算部Eが、偏差に対して、例えば、所定特性を有するデジタルフィルタを適用することで、その偏差がなくなるようにするフィードバック操作量を演算する。
ステップ7では、平滑化係数演算部Fが、前述した方法で、検出燃圧又は回転速度(噴射間隔)に基づいて、フィルタのゲイン特性又はカットオフ周波数特性を変化させるための平滑化係数、要するに、デジタルフィルタの分母係数及び分子係数を演算する。
【0034】
ステップ8では、平滑化部Gが、デジタルフィルタに平滑化係数を代入して、フィードバック操作量を平滑化した平滑化操作量を演算する。
ステップ9では、操作量演算部Hが、フィードフォーワード操作量と平滑化操作量とを加算した、燃料ポンプ16の操作量を演算する。
ステップ10では、ポンプ制御部Iが、燃料ポンプ16の操作量に基づいて、燃料ポンプ16を制御する。
【0035】
このような燃料供給システムによれば、エンジン運転状態としての負荷,回転速度及び水温に応じた目標燃圧が演算され、燃料ギャラリーパイプ20における燃圧を目標燃圧とするためのフィードフォワード操作量が演算される。また、エンジン運転状態に応じた目標燃圧に対して、燃料ポンプ16を所定の特性で応答させるための規範燃圧が演算され、規範燃圧と検出燃圧との偏差をなくすようにするフィードバック操作量が演算される。
【0036】
そして、検出燃圧又は回転速度に応じた平滑化係数を代入したデジタルフィルタにより、フィードバック操作量を平滑化した平滑化操作量を演算し、フィードバック操作量と平滑化操作量との加算値に応じて燃料ポンプ16が制御される。このとき、平滑化係数は、過大なフィードバック制御を抑制、又は、過渡期の制御性能を改善するように、フィルタのゲイン特性又はカットオフ周波数特性を演算する。
【0037】
従って、燃圧脈動の振幅及び周波数と密接に関連する実燃圧又は噴射間隔に応じて、フィルタのゲイン特性又はカットオフ周波数特性が動的に変化することから、過大なフィードバック制御の抑制と過渡期の制御性能を両立させることができる。
ここで、前記実施形態から把握し得る請求項以外の技術的思想について、以下に効果と共に記載する。
【0038】
(イ)前記平滑化手段は、前記フィルタを有効又は無効に切り換えることで、前記フィルタのゲイン特性を変化させることを特徴とする請求項2に記載の燃料圧力制御装置。
この発明によれば、フィルタを有効又は無効に切り換えることで、フィルタのゲイン特性を変化させることができる。
(ロ)前記平滑化手段は、前記フィルタの次数を変化させることで、前記フィルタのゲイン特性を変化させることを特徴とする請求項2に記載の燃料圧力制御装置。
この発明によれば、フィルタの次数を変化させることで、フィルタのゲイン特性を変化させることができる。
(ハ)前記平滑化手段は、前記フィルタの減衰係数を変化させることで、前記フィルタのゲイン特性を変化させることを特徴とする請求項2に記載の燃料圧力制御装置。
この発明によれば、フィルタの減衰係数を変化させることで、フィルタのゲイン特性を変化させることができる。
(ニ)前記目標燃料圧力に対して、前記燃料ポンプを所定の特性で応答させるための規範燃料圧力を演算する規範燃料圧力演算手段を更に有し、前記操作量演算手段は、前記燃料配管における実際の燃料圧力が前記規範燃料圧力に近づくようにするフィードバック操作量を演算することを特徴とする請求項1〜請求項3、(イ)〜(ハ)のいずれか1つに記載の燃料圧力制御装置。
【0039】
この発明によれば、燃料ポンプを所定の特性で応答させることができる。また、排気エミッションの低下を抑制することもできる。
【符号の説明】
【0040】
12 エンジン
16 燃料ポンプ
18 燃料パイプ
20 燃料ギャラリーパイプ
24 燃料噴射弁
26 電子制御ユニット
30 回転速度センサ
36 燃圧センサ
A 目標燃圧演算部
B フィードフォワード操作量演算部
C 規範燃圧演算部
D 偏差演算部
E フィードバック操作量演算部
F 平滑化係数演算部
G 平滑化部
H 操作量演算部
I ポンプ制御部
【特許請求の範囲】
【請求項1】
燃料供給配管を介して燃料ポンプから燃料噴射弁に供給される燃料の圧力が機関運転状態に応じた目標燃料圧力となるように、前記燃料ポンプの駆動を制御する燃料圧力制御装置において、
前記燃料供給配管における実際の燃料圧力が前記目標燃料圧力に近づくようにするフィードバック操作量を演算する操作量演算手段と、
前記フィードバック操作量をフィルタで平滑化する平滑化手段と、
前記平滑化されたフィードバック操作量に基づいて、前記燃料ポンプの駆動をフィードバック制御する制御手段と、
を有することを特徴とする燃料圧力制御装置。
【請求項2】
前記平滑化手段は、前記燃料供給配管における実際の燃料圧力が高くなるほど、前記フィルタのゲイン特性を強くすることを特徴とする請求項1に記載の燃料圧力制御装置。
【請求項3】
前記平滑化手段は、前記燃料噴射弁から噴射される燃料の噴射間隔が短くなるほど、前記フィルタのカットオフ周波数特性を高くすることを特徴とする請求項1に記載の燃料圧力制御装置。
【請求項1】
燃料供給配管を介して燃料ポンプから燃料噴射弁に供給される燃料の圧力が機関運転状態に応じた目標燃料圧力となるように、前記燃料ポンプの駆動を制御する燃料圧力制御装置において、
前記燃料供給配管における実際の燃料圧力が前記目標燃料圧力に近づくようにするフィードバック操作量を演算する操作量演算手段と、
前記フィードバック操作量をフィルタで平滑化する平滑化手段と、
前記平滑化されたフィードバック操作量に基づいて、前記燃料ポンプの駆動をフィードバック制御する制御手段と、
を有することを特徴とする燃料圧力制御装置。
【請求項2】
前記平滑化手段は、前記燃料供給配管における実際の燃料圧力が高くなるほど、前記フィルタのゲイン特性を強くすることを特徴とする請求項1に記載の燃料圧力制御装置。
【請求項3】
前記平滑化手段は、前記燃料噴射弁から噴射される燃料の噴射間隔が短くなるほど、前記フィルタのカットオフ周波数特性を高くすることを特徴とする請求項1に記載の燃料圧力制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−108503(P2013−108503A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2013−34879(P2013−34879)
【出願日】平成25年2月25日(2013.2.25)
【分割の表示】特願2010−210371(P2010−210371)の分割
【原出願日】平成22年9月21日(2010.9.21)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成25年2月25日(2013.2.25)
【分割の表示】特願2010−210371(P2010−210371)の分割
【原出願日】平成22年9月21日(2010.9.21)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]