
移動体位置情報送信装置
【課題】個人情報を保護することが可能な移動体位置情報送信装置を提供する。
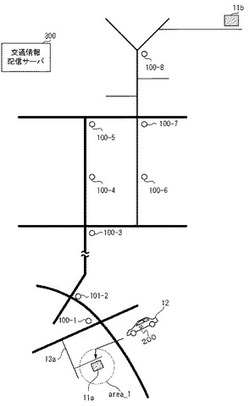
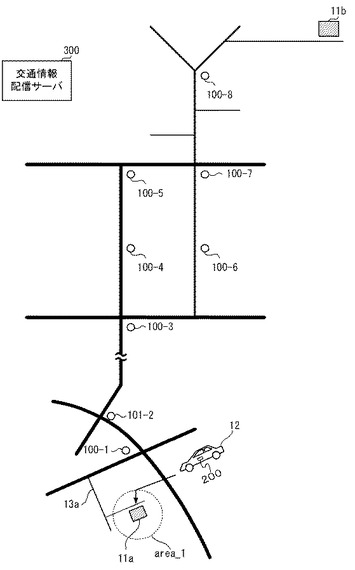
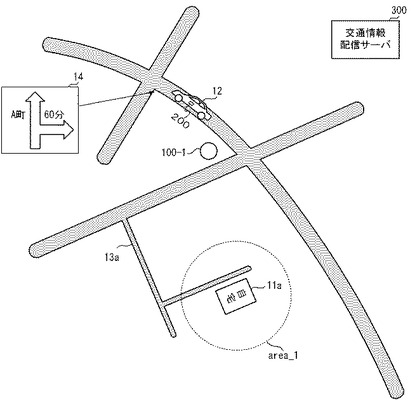
【解決手段】車両12は、自宅11aの前から出発し、目的地11bまで移動する。領域area_1は自宅11aを中心とし自宅11aの位置の特定が容易と推定される領域であり、探索対象道路13aは、車両12の移動経路探索に必要な探索対象道路である。車載機200は、路側機100からの位置情報の要求に対して、この領域area_1において取得した位置情報等を送信しない。そして、車載機200は、車両12がこの領域area_1外に出た後に取得した車両12の位置情報等を路側機100に送信する。個人情報を保護しつつ、車両の位置情報を路側機に送信する。
【解決手段】車両12は、自宅11aの前から出発し、目的地11bまで移動する。領域area_1は自宅11aを中心とし自宅11aの位置の特定が容易と推定される領域であり、探索対象道路13aは、車両12の移動経路探索に必要な探索対象道路である。車載機200は、路側機100からの位置情報の要求に対して、この領域area_1において取得した位置情報等を送信しない。そして、車載機200は、車両12がこの領域area_1外に出た後に取得した車両12の位置情報等を路側機100に送信する。個人情報を保護しつつ、車両の位置情報を路側機に送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体位置情報送信装置に関する。
【背景技術】
【0002】
VICS(VehicleInformationandCommunicationSystem:道路交通情報通信システム)は、FM多重放送、電波ビーコン、光ビーコンの3メディアを用いて、渋滞情報等の道路交通情報をリアルタイムにドライバーに提供するシステムである。
【0003】
また、DSRC(DedicatedShortRangeCommunications:狭域通信)により、路側に設置した無線設備(DSRC路側システム)と路上の車両に設置したDSRC送受信機(DSRC車載器)との間を高速の無線通信回線で結び、大容量のデータ通信を可能とするシステムがある(例えば、特許文献1参照)。
【0004】
また、OD(OriginandDestination)調査等のため、DSRCを利用し、車両がビーコンに接続して、車両の緯度、経度を位置情報としてビーコンに送信するようにしたナビゲーションシステムもある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−109989号公報(第7頁、図1)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、このようなOD調査において、必要とされるのは、あくまでも統計的な情報であって、個々の利用者の移動履歴そのものではない。
【0007】
その一方、車両が自宅を出発する往路、あるいは、車両が自宅に戻る復路において、位置情報をビーコンに送信すると、車両運転者の自宅が特定されてしまい、個人情報の流出にもつながりかねない。
【0008】
本発明は、このような従来の問題点に鑑みてなされたもので、個人情報を保護することが可能な移動体位置情報送信装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この目的を達成するため、本発明の第1の観点に係る移動体位置情報送信装置は、
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が投入されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源投入の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より短い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする。
【0010】
本発明の第2の観点に係る移動体位置情報送信装置は、
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が切断されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源切断の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より長い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする。
【発明の効果】
【0011】
本発明によれば、個人情報を保護することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態1に係るITSシステムの構成を示すブロック図である。
【図2】路側機の構成を示すブロック図である。
【図3】車載機の構成を示すブロック図である。
【図4】記憶装置が記憶する情報を示す図である。
【図5】制御装置が位置情報の送信タイミングを設定する第1の方法を示す図である。
【図6】制御装置が位置情報の送信タイミングを設定する第2の方法を示す図である。
【図7】制御装置が位置情報の送信タイミングを設定する第3、4の方法を示す図である。
【図8】制御装置が位置情報の送信タイミングを設定する第5の方法を示す図である。
【図9】制御装置が位置情報の送信タイミングを設定する第6の方法を示す図である。
【図10】制御装置が位置情報の送信タイミングを設定する第7の方法を示す図である。
【図11】制御装置が実行する第1の方法による情報送信処理(1)を示すフローチャートである。
【図12】制御装置が実行する第2の方法による情報送信処理(2)を示すフローチャートである。
【図13】制御装置が実行する第3の方法による情報送信処理(3)を示すフローチャートである。
【図14】制御装置が実行する第4の方法による情報送信処理(4)を示すフローチャートである。
【図15】制御装置が実行する第5の方法による情報送信処理(5)を示すフローチャートである。
【図16】制御装置が実行する第6の方法による情報送信処理(6)を示すフローチャートである。
【図17】制御装置が実行する第7の方法による情報送信処理(7)を示すフローチャートである。
【図18】実施形態2の記録処理を示すフローチャートである。
【図19】実施形態3の記録処理を示すフローチャートである。
【図20】実施形態4の記録処理を示すフローチャートである。
【図21】実施形態5の記録処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の実施形態に係るナビゲーションシステムの移動体位置情報送信装置を図面を参照して説明する。尚、本実施形態においては、ITS(IntelligentTransportSystems)システムを例に説明する。
【実施例1】
【0014】
ITSシステムは、図1に示すように、路側機100(本実施形態では、路側機100−1〜100−8)と、車載機200と、交通情報配信サーバ300と、を備える。
【0015】
車載機200は、後述するように、GPS(GlobalPositioningSystem)によって車載機200の現在位置を示す位置情報を取得する。車載機200は、取得した位置情報と、この位置情報を取得した時刻を示す時刻情報とを路側機100に送信する。
【0016】
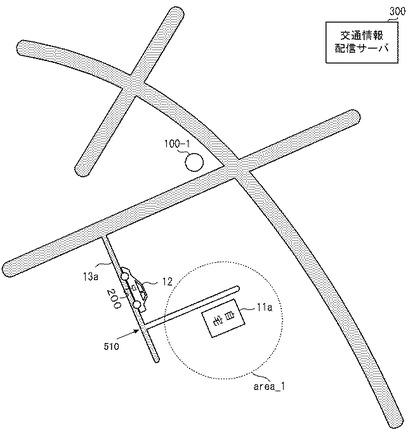
ここで、車載機200は、位置情報と時刻情報をどの場所で取得したかによって、これらの情報を路側機100に送信するか否かを判定する。すなわち、車載機200は、領域area_1内で取得した位置情報と時刻情報については路側機100に送信せず、それ以外の領域で取得した位置情報と時刻情報については路側機100に送信する。例えば、この領域area_1は、車両12の出発地11aを中心とした所定半径の円内の領域である。出発地11aはユーザの自宅など個人を特定できるような場所である可能性が高く、個人情報保護のため、領域area_1内で取得した車両12の位置情報と時刻情報を送信しないように構成される。本実施形態では、領域area_1は所定半径の円内で示す領域であり、この円の半径は可変の値とすることができる。詳細については後述する。領域area_1は円ではなく他の任意の図形で表されるものであってもよい。
【0017】
路側機100は、それぞれ、所謂電波ビーコン、光ビーコン等から構成され、道路近傍や駐車場等に配置され、交通情報配信サーバ300から配信された交通情報を、近傍を通過する車両12の車載機200に送信する。
【0018】
また、路側機100は、OD調査のため、車載機200に、車両12の位置情報と時刻情報との送信を要求する。OD調査は、車両12等の移動に関する起点(Origin)と終点(Destination)との調査である。路側機100は、車載機200から位置情報や時刻情報を受信する。このように、路側機100は、車載機200と様々な情報を送受信する通信装置として機能する。
【0019】
そして、路側機100は、車載機200から受信した車両12の位置情報を交通情報配信サーバ300に送信する。交通情報配信サーバ300は、路側機100から受信した位置情報と時刻情報に基づいて統計処理を行って、交通計画などを作成するための参考資料となるデータを生成する。なお、交通情報配信サーバ300に蓄積されるデータの用途は本発明によって限定されない。
【0020】
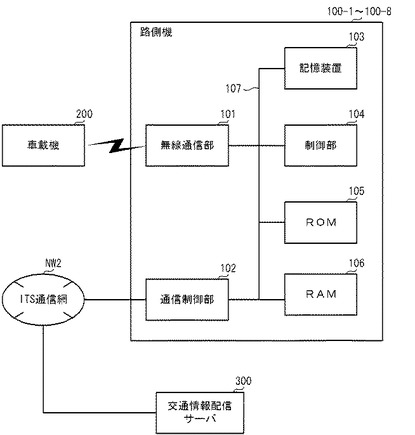
次に、路側機100の構成について説明する。路側機100は、図2に示すように、無線通信部101と、通信制御部102と、記憶装置103と、制御部104と、ROM(ReadOnlyMemory)105と、RAM(RandomAccessMemory)106と、システムバス107と、を備える。
【0021】
無線通信部101と、通信制御部102と、記憶装置103と、制御部104と、ROM105と、RAM106とは、システムバス107を介して接続され、互いに命令やデータを転送する。
【0022】
無線通信部101は、電波信号、光信号等の無線信号により、路側機100の近傍を通過する車両12に設置された車載機200との間で情報を送受信する。無線通信部101は、例えば、交通情報配信サーバ300より提供された交通情報を車載機200に送信する。また、無線通信部101は、車載機200から送信されてくる車両ID、位置情報、時刻情報等を受信する。車両IDは、車載機200を識別するための情報である。これにより、路側機100は、どの車両が、いつ、どの位置にいるかを示すデータを取得できる。
【0023】
通信制御部102は、ITS通信網NW2を介して交通情報配信サーバ300に接続され、交通情報配信サーバ300から送信される交通情報を受信する。また、通信制御部102は、自機が取得した情報を、交通情報配信サーバ300に提供する。
【0024】
記憶装置103は、交通情報配信サーバ300から受信した交通情報や、自装置固有の交通情報を格納する。また、記憶装置103は、無線通信部101によって取得された車両ID、位置情報、時刻情報などの情報を記憶する。
【0025】
制御部104は、CPU(CentralProcessingUnit)などから構成され、路側機100全体の動作を制御する。例えば、制御部104は、記憶装置103に格納されている交通情報を、無線通信部101に供給して、この交通情報を送信させる。また、制御部104は、無線通信部101を介して車載機200から取得した情報を記憶装置103に格納する。
【0026】
また、制御部104は、記憶装置103に格納されている、車載機200から取得した情報を、通信制御部102及びITS通信網NW2を介して交通情報配信サーバ300に送信する。また、交通情報配信サーバ300から通信制御部102を介して取得した交通情報などを記憶装置103に格納する。
【0027】
ROM105は、この路側機100全体の動作制御に必要なオペレーティングシステム(OS)、各種のプログラム、データを記憶する。
【0028】
RAM106は、制御部104のワークエリアとして機能する。
【0029】
次に、車載機200の構成について説明する。本実施形態の車載機200は、車両12に設置されたナビゲーションシステムであり、例えば、カーナビゲーション装置と一体に構成される。一般的なカーナビゲーションの機能と共に、路側機100から送信された交通情報を再生して報知する機能を備える。
【0030】
また、車載機200は、OD調査等のため、車両12の緯度、経度を位置情報として路側機100に送信する機能を備える。さらに、車載機200は、個人情報保護のため、取得した位置情報などの送信タイミングを制御する機能を有する。なお、以下の説明においては、本発明をより理解しやすくするために、車両12の出発地をユーザの自宅とし、"出発地11a"を"自宅11a"と表記する。
【0031】
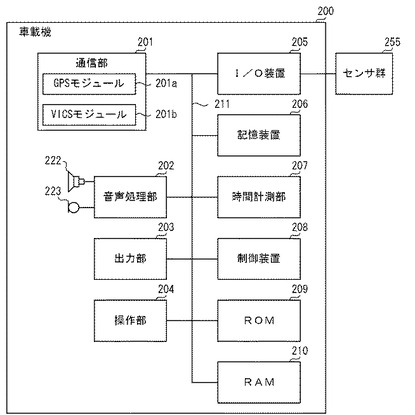
車載機200は、図3に示すように、通信部201と、音声処理部202と、出力部203と、操作部204と、I/O装置205と、記憶装置206と、時間計測部207と、制御装置208と、ROM209と、RAM210と、システムバス211と、を備える。
【0032】
通信部201と、音声処理部202と、出力部203と、操作部204と、I/O装置205と、記憶装置206と、時間計測部207と、制御装置208と、ROM209と、RAM210とは、システムバス211を介して接続され、命令やデータを転送する。
【0033】
通信部201は、GPSモジュール201a、VICS(VehicleInformationandCommunicationSystem)モジュール201bを含む。
【0034】
GPSモジュール201aは、所定のタイミングで複数のGPS衛星からのGPS電波を受信し、得られたGPS信号(測位データ)を制御装置208に供給する。
【0035】
VICSモジュール201bは、路側機100との間でDSRC(DedicatedShortRangeCommunication)方式により通信を行う。
【0036】
音声処理部202は、制御装置208から入力されたディジタルオーディオ信号をD/Aコンバータ(図示せず)でアナログオーディオ信号に変換して、スピーカ222に出力する。また、音声処理部202は、マイクロフォン223から入力された音声をA/Dコンバータ(図示せず)でディジタルオーディオ信号に変換して、制御装置208に入力する。これにより、ユーザはナビゲーション音声を聞いたり、音声を入力したりすることができる。
【0037】
出力部203は、LCD(LiquidCrystalDisplay)などのモニタ装置を備え、通信部201により取得されたナビゲーション画像やTV画像、あるいは記憶装置206等に予め記憶されたマップ画像などを表示する。
【0038】
操作部204はタッチパネル式入力装置などから構成され、ユーザによる指示入力に基づいて指示入力信号を生成して、制御装置208に入力する。
【0039】
I/O装置205は、DVD−ROM(DigitalVersatileDisk-ReadOnlyMemory)
ドライブを含み、所定の地図情報などを納めたDVD−ROMやCD−ROMからデータを読み出して制御装置208に入力する。
【0040】
また、I/O装置205は、速度センサ、走行距離センサ、方位センサ、ブレーキセンサ等のセンサ群225から送られてくる検出信号を取得し、制御装置208に供給する。
【0041】
また、I/O装置205は、IDカードに記録データを読み取るカードリーダ(図示せず)を備える。そして、I/O装置205は、IDカードがカードリーダに挿入されると、IDカードに記録されている車両IDの入力を受け付け、この車両IDを制御装置208に供給する。
【0042】
記憶装置206は、ハードディスクドライブ(HDD)を含み、探索対象道路の情報を含む地図情報(マップデータ)や各種情報を記憶する。なお、記憶装置206は、メモリカードなどの他のメモリを備えていてもよい。制御装置208は、I/O装置205を介して、地図情報を記憶したDVD−ROM等の記憶媒体からこの地図情報を読み出し、記憶装置206に予め書き込む。探索対象道路とは、車載機200が移動経路のナビゲーションをする際に、車両12の移動経路を探索するための対象となる道路のことである。
【0043】
時間計測部207は、車両12が自宅11aの前を出発してからの走行時間を計測するものである。時間計測部207は、計測した走行時間と現在の時刻情報とを、制御装置208に供給する。時間計測部207は、他の任意の地点間の走行時間を計測することもできる。
【0044】
制御装置208は、CPU(CentralProcessingUnit)やECU(ElectoronicContr
olUnit)などから構成され、車載機200全体の動作を制御する。制御装置208は、
コプロセッサ等を備えても良い。
【0045】
例えば、制御装置208は、GPSモジュール201aを介して受信したGPS信号に基づいて、車両12(車載機200)の位置情報を取得する。この位置情報は、車載機200を搭載した車両12が存在する位置を緯度と経度で表したデータである。
【0046】
さらに、制御装置208は、センサ群225に含まれている方向センサの出力をI/O装置205を介して取り込み、現在の車両12の進行方向を判別する。また、制御装置208は、走行距離センサの検出信号に基づいて自宅11aからの走行距離Lxを取得する。また、制御装置208は、ブレーキセンサの検出信号に基づいて車両12の制動装置(ここではパーキングブレーキあるいはサイドブレーキを指す)が作動しているか否かを判別する。
【0047】
また、制御装置208は、領域area_1内での位置情報の送信を停止するため、記憶装置208に記憶されている地図情報を参照し、この領域area_1内で取得した位置情報を記憶装置206には記憶しないようにする。
【0048】
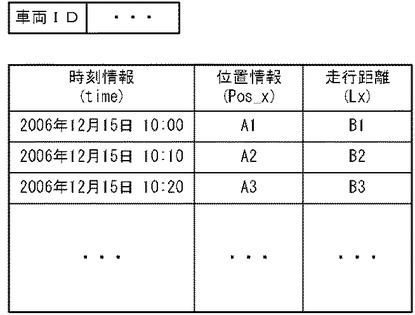
そして、制御装置208は、時間計測部207から時刻情報timeとを取得し、図4に示すように、I/O装置205から供給された車両IDと、時刻情報timeと、車両12の位置情報Pos_xと、を対応付けて記憶装置206に記憶する。
なお、制御装置208は、どの場所で取得したかに関わらず、取得した位置情報や時刻情報等を記憶装置208に記憶させるようにしてもよい。ただし、この場合、制御装置208は、領域area_1内で取得した情報については路側機100に送信しない。
【0049】
また、制御装置208は、VICSモジュール201bを介して路側機100からの交通情報を受信し、受信した交通情報に含まれている再生タイミング制御データ(パラメータ)に基づいて、これを再生する。すなわち、制御装置208は、路側機100から送られてきた様々な情報を逐次出力部203に出力させるだけでなく、ある情報を所定の時刻や所定のタイミングになったときに出力させることもできる。
【0050】
また、制御装置208は、領域area_1外において、近傍の路側機100から車両12の位置情報Pos_xを送信する旨の要求があると、車両IDと車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出して通信部201のVICSモジュール201bに供給する。そして、制御装置208は、この車両IDと位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。この位置情報Pos_xと時刻情報timeとは、前述のようにOD調査等に用いられる。
【0051】
上述のように、制御装置208は、個人情報保護のため、領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_xを送信しない。
【0052】
そして、制御装置208は、車両12がこの領域area_1外に出ると、それ以降にGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて送信する。再び車両12が領域area_1内に入った場合には同様に送信しないことは言うまでもない。このような送信タイミングの設定方法として、複数の方法が考えられる。
【0053】
まず、第1の方法は、探索対象の道路に進入したときから路側機100に位置情報Pos_xを送信する方法である。以下の説明では、図1に示すように、車両12は、自宅11aを出発地として出発し、目的地11bまで移動するものとする。
【0054】
図5に示すように、探索対象道路13aは、領域area_1外の道路であって、車両12の移動経路探索用の道路である。制御装置208は、車両12が探索対象道路13aに進入した後、GPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。探索対象道路13aに進入する前、すなわち、自宅11aから交差点510で探索対象道路13aに入るまでは、制御装置208はこれらの情報を送信しない。
【0055】
ここで、制御装置208は、この領域area_1の大きさ(本実施形態では円の半径)を、単位面積当たりの道路の本数に基づいて住宅密集度を推定する。住宅密集度が高い首都圏型と住宅が数キロメートルに1軒程度の過疎型とを比較した場合、道路の本数を同一とすると、住宅密集度が高い首都圏型では、道路の密集度も高い。そのため、領域area_1を狭くする。一方、住宅密集度が低い過疎型では、道路の密集度も高い。そのため、領域area_1を広くする。いずれにしても、領域area_1は、自宅11aの位置が容易に特定可能か否かを基準にして設定される。
言い換えれば、制御装置208は、自宅11a付近の住宅密集度が高ければ領域area_1の円の半径を小さくし、住宅密集度が低ければ領域area_1の円の半径を大きくする。円の半径は住宅密集度に対して単調減少(典型的には反比例)する。なお、領域area_1を円ではない他の形状の任意の図形として表す場合、制御装置208は、領域area_1内の面積が住宅密集度に対して単調減少するように領域area_1を設定する。
【0056】
第2の方法は、路側機100の前を通過したときにGPSモジュール201aが取得した車両12の位置情報Pos_xを、路側機100に送信する方法である。図6に示すように、制御装置208は、車両12が路側機100の前を通過すると、GPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。すなわち、制御装置208は、車両12の現在位置が路側機100から所定距離以内か否かを判別し、所定距離以内と判別された場合に路側機100に送信する。
【0057】
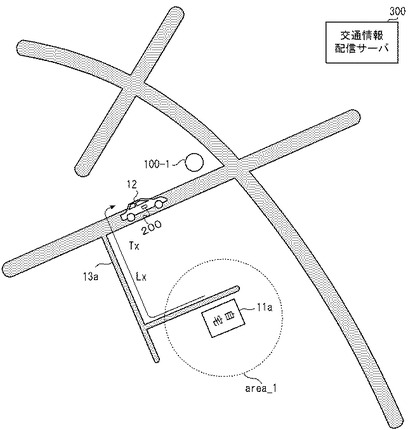
第3の方法は、自宅11aを出発してから現在までの経過時間が、車両12の領域area_1外に出たか否かを判別するために予め設定された閾時間を越えたとき、領域area_1外であると判別した時刻から位置情報Pos_x等を送信する方法である。
【0058】
制御装置208は、時間計測部207が計測した経過時間を取得する。制御装置208は、図7に示すように、この経過時間Txが予め設定された閾時間T_thを越えたとき、車両12が領域area_1外に出たと判別する。そして、制御装置208は、領域area_1外に出たと判別された時刻から、GPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。ROM209又は記憶装置206は、この閾時間T_thを予め記憶し、制御装置208は適宜これを読み出して判別する。
【0059】
第4の方法は、自宅11aを出発してから現在位置までの走行距離が、車両12の領域area_1通過を判別するために予め設定された閾距離を越えたとき、領域area_1外であると判別した位置から位置情報Pos_x等を送信する方法である。
【0060】
制御装置208は、センサ群225の走行距離センサが計測した自宅11aを出発してからの走行距離Lxを、I/O装置205を介して取得する。制御装置208は、図7に示すように、この走行距離Lxが、領域area_1外に出たかを判別するために予め設定された閾距離L_thを越えたとき、車両12が領域area_1外に出たと判別する。ROM209又は記憶装置206は、この閾距離L_th予めを記憶し、制御装置208は適宜これを読み出して判別する。
【0061】
そして、制御装置208は、路側機100からの送信要求に対し、車両12が領域area_1外に出たと判別した位置からGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0062】
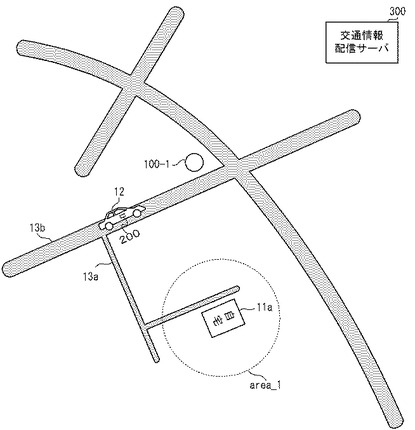
第5の方法は、交通情報が提供される道路として、VICSリンクが設定された道路に進入したときから、位置情報Pos_x等を送信する方法である。例えば、図8に示すように、探索対象道路13bには、主要交差点毎に道路を区切った単位としてVICSリンクが設定され、探索対象道路13aには設定されていない。VICSリンクとは、探索対象道路を交差点等によって区間に区切り、交通情報を提供する際の単位となるものである。したがって、VICSリンクが設定されていれば、ユーザはその道路についての交通情報の提供を受けることができる。
【0063】
制御装置208は、車両12がこの探索対象道路13bに進入したときからGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0064】
第6の方法は、車載機200に渋滞情報が供給されてから車両12の位置情報Pos_xを送信する方法である。路側機100が設置されたエリアによって渋滞状況が異なる。制御装置208は、車両12が渋滞情報が供給される位置(すなわち渋滞している道路)にいるか否かを判別する。そして、制御装置208は、図9に示すように、渋滞情報が供給されてからGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0065】
第7の方法は、次の探索対象道路から位置情報Pos_xを送信する方法である。図10に示すように、探索対象道路13cは、探索対象道路13aに進入した後、さらに進入した次の探索対象道路である。次の探索対象道路とは、道路種別の異なる探索対象道路、もしくは、同一種別であっても1つ以上の交差点通過後の探索対象道路を意味する。
【0066】
制御装置208は、地図情報に基づいて現在車両12が走行している道路がどの探索対象道路かを判別し、次の探索対象道路13cに進入したときからGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0067】
尚、制御装置208は、車両12が目的地11bから自宅11aに向かって移動する場合についても同様であり、領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを送信しない。
【0068】
また、制御装置208は、目的地11bについても同様の処理を行う。即ち、制御装置208は、目的地11bを中心とした領域area_2(目的地11bの特定が容易な領域)を設定し、この領域area_2内においてGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを送信しない。
【0069】
ROM209には、車載機200全体の動作制御に必要なオペレーティングシステム(OS)のプログラムや各種のデータが記録される。
【0070】
ROM209は、車両12の位置情報Pos_xと時刻情報timeとの送信タイミングを設定する設定情報として、例えば第1の方法〜第7の方法に例示したような方法による送信処理をするためのプログラムを記憶する。制御装置208は、第1の方法〜第7の方法のうちいずれかが指定されると、指定された方法のプログラムを読み出す。
【0071】
そして、制御装置208は、読み出した方法に従って車両12の位置情報Pos_xと時刻情報timeとを送信するタイミングを設定し、設定したタイミングで車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信するように制御する。
【0072】
RAM210は、データやプログラムを一時的に記憶するためのもので、通信部201により取得されたデータ、DVD−ROMから読み出したデータ等が保持される。
また、制御装置208は、RAM210をワークメモリとして使用する。
【0073】
交通情報配信サーバ300は、種々の交通情報を生成し、生成した交通情報を路側機100別に配信するものである。
【0074】
交通情報配信サーバ300は、各路側機100から取得した車両12等の位置情報Pos_xと時刻情報timeとに基づいて、渋滞状況を判別する。
【0075】
そして、交通情報配信サーバ300は、判別した渋滞状況に基づいて渋滞情報を生成し、この渋滞情報を各路側機100に配信する。
【0076】
(位置情報等の送信処理)
次に、本実施形態に係るナビゲーションシステムの動作を説明する。本実施形態では、車載機200は、操作部204がユーザから車両12の目的地(ここでは自宅11a)の入力を受け付け、制御装置208が車両12の出発地から目的地11bまでの移動経路の道案内をする(ナビゲーションする)場面を想定して説明する。
車両12のエンジンのスイッチがオンすると、車載機200のGPSモジュール201aは、複数のGPS衛星からのGPS電波を受信し、制御装置208は、車両12の位置情報Pos_xを取得する。
【0077】
制御装置208は、I/O装置205から供給された車両IDと、時間計測部207から取得した時刻情報timeと、取得した車両12の位置情報Pos_xと、走行距離Lxと、を記憶装置206に記憶する。
【0078】
車両12は、自宅11aの前から出発し、目的地11bに向かって移動する。制御装置208は、GPSモジュール201aによって位置情報を取得する毎に、これらの情報を記憶装置206に記憶させ蓄積する。
【0079】
制御装置208は、近傍の路側機100から車両12の位置情報Pos_x等の送信要求があると、第1の方法〜第7の方法のうちから指定された方法のプログラムをROM09から読み出す。そして、このプログラムに従って、車両12の位置情報Pos_x等を送信する。制御装置208は、いずれの方法によって送信するかを指定する入力を予めユーザから受け付けて、受け付けた方法で送信する。
【0080】
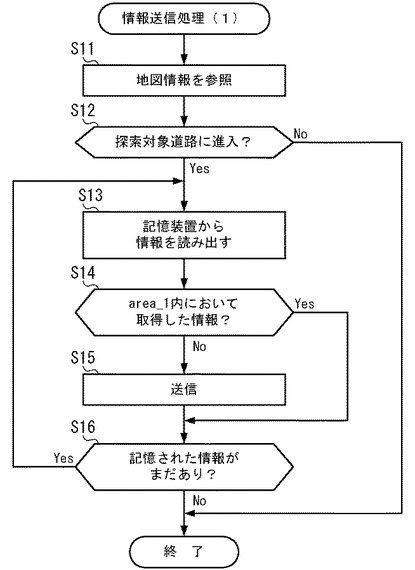
第1の方法が指定された場合、制御装置208は、図11に示すフローチャートに従って、情報送信処理(1)を実行する。
【0081】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS11)。
【0082】
制御装置208は、参照した地図情報に基づいて探索対象道路に進入したか否かを判定する(ステップS12)。
【0083】
探索対象道路に進入していないと判定した場合(ステップS12;No)、制御装置208は、この情報送信処理(1)を終了させる。
【0084】
探索対象道路に進入したと判定した場合(ステップS12;Yes)、制御装置208は、車両12の位置情報Pos_xと、この位置情報Pos_xに対応付けられた時刻情報timeとを、記憶装置206から読み出す(ステップS13)。例えば、制御装置208は、記憶装置206に記憶された位置情報Pos_xのうち、まだ路側機100に送信していないもので、且つ、最も古い時刻情報が対応付けられているものを1つ取得する。
【0085】
制御装置208は、参照した地図情報に基づいて、読み出した位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報であるか否かを判定する(ステップS14)。
【0086】
読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS14;No)、制御装置208は、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS15)。
【0087】
制御装置208は、記憶装置206から読み出していない情報がまだあるか否かを判定する(ステップS16)。
【0088】
読み出していない情報がまだあると判定した場合(ステップS16;Yes)、制御装置208は、すべての情報を読み出すまでステップS13乃至S16の処理を繰り返す。
【0089】
一方、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報であると判定した場合(ステップS14;Yes)、制御装置208は、読み出した位置情報Pos_xと時刻情報timeとを送信しない。この場合、制御装置208は、領域area_1内で取得したと判定された位置情報Pos_xと時刻情報timeとを削除してもよい。ただし、削除するタイミングはこれに限られず任意に変更してよい。
【0090】
そして、記憶装置208からすべての情報を読み出したと判定した場合(ステップS16;No)、制御装置208は、この情報送信処理(1)を終了させる。なお、制御装置208は、すべての位置情報Pos_xと時刻情報timeを正常に送信できた場合、これらの情報を記憶装置206から削除してもよい。
【0091】
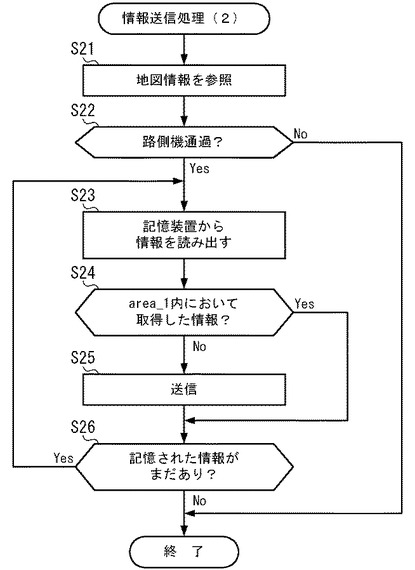
第2の方法が指定された場合、制御装置208は、図12に示すフローチャートに従って、情報送信処理(2)を実行する。
【0092】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS21)。
【0093】
制御装置208は、参照した地図情報に基づいて路側機100近傍を通過したか否かを判定する(ステップS22)。例えば、制御装置208は、路側機100から所定距離以内に車両12(車載機200)が存在するか否かによって判定する。
【0094】
路側機100を通過していないと判定した場合(ステップS22;No)、制御装置208は、この情報送信処理(2)を終了させる。
【0095】
路側機100を通過したと判定した場合(ステップS22;Yes)、制御装置208は、車両12の位置情報Pos_xと、この位置情報Pos_xに対応付けられた時刻情報timeとを記憶装置206から読み出す(ステップS23)。
【0096】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS24;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS25)。
【0097】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS24;Yes)、制御装置208は、これらの情報を送信しない。
【0098】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS26;Yes、S23〜S25)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS26;No)、この情報送信処理(2)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0099】
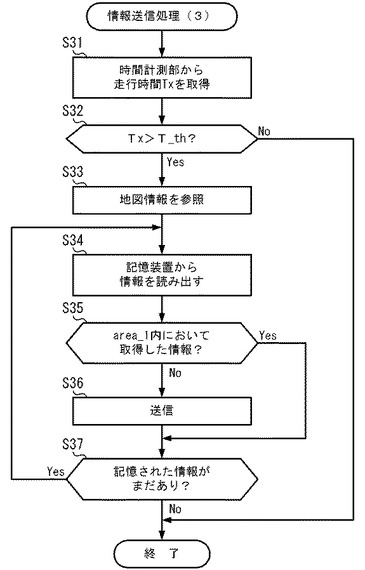
第3の方法が指定された場合、制御装置208は、図13に示すフローチャートに従って、情報送信処理(3)を実行する。
【0100】
制御装置208は、時間計測部207から走行時間Txを取得する(ステップS31)。例えば、時間計測部207は、エンジンが始動して車載機200の電源がオンになってから現在時刻までの経過時間を計測する。あるいは、電源がオンになり車両12の移動速度がゼロでないと判別したときから現在時刻までの経過時間を計測する。
【0101】
制御装置208は、取得した走行時間Txが予め設定された閾時間T_thを越えたか否かを判定する(ステップS32)。
【0102】
取得した走行時間Txが予め設定された閾時間T_thを越えていないと判定した場合(ステップS32;No)、制御装置208は、この情報送信処理(3)を終了させる。
【0103】
取得した走行時間Txが予め設定された閾時間T_thを越えたと判定した場合(ステップS32;Yes)、制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS33)。
【0104】
制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS34)。
【0105】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS35;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS36)。
【0106】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS35;Yes)、制御装置208は、これらの情報を送信しない。
【0107】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS37;Yes、S34〜S36)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS37;No)、この情報送信処理(3)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0108】
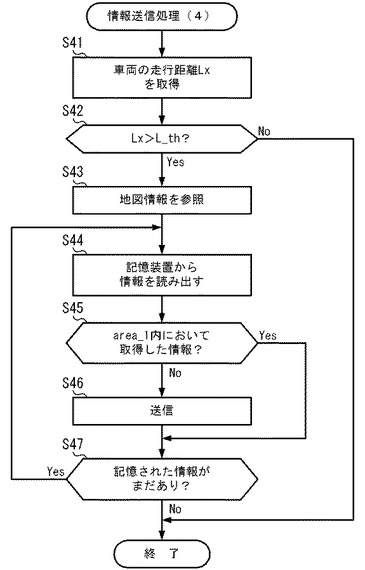
第4の方法が指定された場合、制御装置208は、図14に示すフローチャートに従って、情報送信処理(4)を実行する。
【0109】
制御装置208は、走行距離Lxを取得する(ステップS41)。例えば、制御装置208は、自宅11aを出発してから現在位置までに通った経路の長さを合計して、走行距離Lxを計算する。
【0110】
制御装置208は、取得した走行距離Lxが予め設定された閾距離L_thを越えたか否かを判定する(ステップS42)。
【0111】
取得した走行距離Lxが予め設定された閾距離L_thを越えていないと判定した場合(ステップS42;No)、制御装置208は、この情報送信処理(4)を終了させる。
【0112】
取得した走行距離Lxが予め設定された閾距離L_thを越えたと判定した場合(ステップS42;Yes)、制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS43)。
【0113】
制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS44)。
【0114】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS45;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS46)。
【0115】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS45;Yes)、制御装置208は、これらの情報を送信しない。
【0116】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS47;Yes、S44〜S46)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS47;No)、この情報送信処理(4)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0117】
第5の方法が指定された場合、制御装置208は、図15に示すフローチャートに従って、情報送信処理(5)を実行する。
【0118】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS51)。
【0119】
制御装置208は、参照した地図情報に基づいてVICSリンクが設定された道路に進入したか否かを判定する(ステップS52)。
【0120】
VICSリンクが設定された道路に進入していないと判定した場合(ステップS52;No)、制御装置208は、この情報送信処理(5)を終了させる。
【0121】
VICSリンクが設定された道路に進入したと判定した場合(ステップS52;Yes)、制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS53)。
【0122】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS54;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS55)。
【0123】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS54;Yes)、制御装置208は、これらの情報を送信しない。
【0124】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS56;Yes、S53〜S55)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS56;No)、この情報送信処理(5)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0125】
第6の方法が指定された場合、制御装置208は、図16に示すフローチャートに従って、情報送信処理(6)を実行する。
【0126】
制御装置208は、渋滞情報を受信したか否かを判定する(ステップS61)。
【0127】
渋滞情報を受信していないと判定した場合(ステップS61;No)、制御装置208は、この情報送信処理(6)を終了させる。
【0128】
渋滞情報を受信したと判定した場合(ステップS621;Yes)、制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS62)。
【0129】
制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS63)。
【0130】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS64;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS65)。
【0131】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS64;Yes)、制御装置208は、これらの情報を送信しない。
【0132】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS66;Yes、S63〜S65)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS66;No)、この情報送信処理(6)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0133】
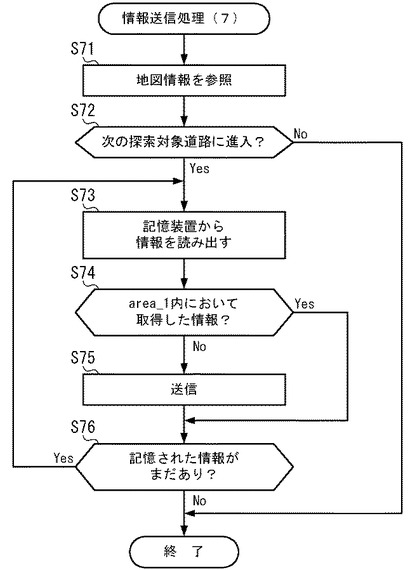
第7の方法が指定された場合、制御装置208は、図17に示すフローチャートに従って、情報送信処理(7)を実行する。
【0134】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS71)。
【0135】
制御装置208は、参照した地図情報に基づいて次の探索対象道路に進入したか否かを判定する(ステップS72)。
【0136】
次の探索対象道路に進入していないと判定した場合(ステップS72;No)、制御装置208は、この情報送信処理(7)を終了させる。
【0137】
次の探索対象道路に進入したと判定した場合(ステップS72;Yes)、制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS73)。
【0138】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS74;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS75)。
【0139】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS74;Yes)、制御装置208は、これらの情報を送信しない。
【0140】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS76;Yes、S73〜S75)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS76;No)、この情報送信処理(7)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0141】
このように車載機200の制御装置208が情報送信処理(1)〜(7)のいずれかを実行すると、近傍の路側機100の無線通信部101は、車両12の車載機200から、車両12の車両IDと位置情報Pos_xと時刻情報timeとを受信する。
【0142】
この路側機100は、無線通信部101が受信した車両12の車両IDと位置情報Pos_xと時刻情報timeとを記憶装置103に格納し、格納したこれらの情報を通信制御部102及びITS通信網NW2を介して交通情報配信サーバ300に送信する。
【0143】
交通情報配信センター300は、路側機100が送信した情報を受信し、受信した情報に基づいて種々の交通情報を生成する。
【0144】
以上説明したように、本実施形態によれば、車載機200の制御装置208は、自宅11aを中心とする自宅11aの位置の特定が容易な領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_x等を送信しない一方、車両12等が領域area_1外に出た後に、GPSモジュール201aが取得した車両12の位置情報Pos_x等を路側機100に送信するようにした。
【0145】
従って、送信された位置情報Pos_xから自宅11aを特定することができず、個人情報の流出を防止することができ、個人情報を保護することができる。
【0146】
また、制御装置208が目的地11bを中心として目的地11bの特定が可能な領域においてGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとの送信を停止するようにした。従って、目的地11bの特定も困難になり、個人情報の保護を、さらに進めることができる。
【0147】
なお、本実施形態では、車載機200が自宅11aから目的地11bまでの移動経路のナビゲーションをする場面を想定して説明したが、必ずしもナビゲーションと共に上記処理を行わなくてもよい。すなわち、ユーザによって目的地11bが指定されなくても、自宅11aの位置を中心とした領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_x等を送信しないように構成することができる。
【実施例2】
【0148】
次に、本発明の他の実施形態について説明する。上述の実施形態では、制御装置208は、車載機200の電源がオンになってから位置情報Pos_xなどの走行履歴を記憶しているが、本実施形態は、車載機200の電源オン後に所定の条件を満たした場合に走行履歴を記憶させるようにする点で異なる。以下、図18のフローチャートを用いて説明する。
【0149】
制御装置208は、所定条件「車載機200の電源オン後、1カ所以上の交差点を通過する」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。
【0150】
具体的には、制御装置208は、記憶装置206に記憶されている地図データと、GPSモジュール201aにより取得した位置情報とに基づいて、自宅11aから現在地までに通った経路に1カ所以上の交差点があるか否か判別する(ステップS81)。例えば、この交差点は、地図データとして交差点の名称が付けられた比較的大きな交差点である。また、交差点は、信号機の設置された交差点でもよい。なお、交差点は小さな十字路やT字路ではなく比較的大きめのものであることが望ましい。
【0151】
制御装置208は、現在位置がarea_1の外であり、且つ、この所定条件を満たした後(ステップS81;Yes)、位置情報Pos_xと時刻情報timeを取得する(ステップS82)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS83)。
【0152】
一方、現在位置がarea_1の外であるか、又は、この所定条件を満たさない場合(ステップS81;No)、制御装置208はこの記録処理を終了する。すなわちこの場合、記憶装置206には走行履歴が記憶されない。
【0153】
さらに、所定条件として、「車載機200の電源オン後、1カ所以上の交差点を左折又は右折して通過する」を定義してもよい。この場合、制御装置208は、ステップS81で、地図データと通過経路とに基づいて、左折又は右折によって進行方向を変えて通過した交差点が1カ所以上あるか否かを判別すればよい。右左折の判断は、制御装置208が地図データと通過経路とを比較し、方向指示器を作動させて進路変更しなければならない場所を実際に通過したか否かによって行う。なお、制御装置208は、車両12の方向指示器がユーザによって作動されたか否かによって右左折を判断してもよい。
【0154】
本実施形態では、通過した交差点の数を1つとしたが、2以上の任意の数でもよいことは言うまでもない。また、「交差点を通過する」とは、交差点の直進、左折、右折による通過のどれでもよいし、例えばこれらを組み合わせて「Nカ所以上の交差点を左折又は右折し、Mカ所以上の交差点を直進して通過する」というような条件としてもよい。N、Mは0以上の整数である。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例3】
【0155】
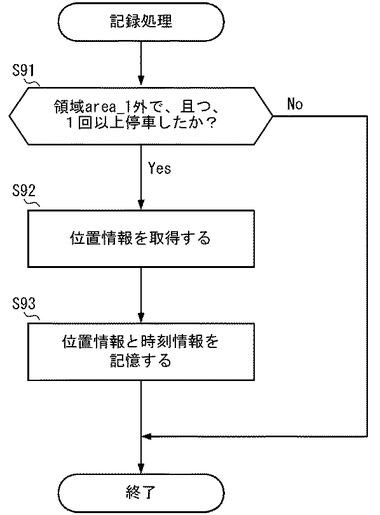
次に、本発明の他の実施形態について説明する。本実施形態も、制御装置208は所定の条件を満たした場合に走行履歴を記憶させる。以下、図19のフローチャートを用いて説明する。
【0156】
制御装置208は、所定条件「車載機200の電源オン後、走行を開始してから1回以上停車する」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。
【0157】
具体的には、制御装置208は、ブレーキセンサからの入力に基づいて、車載機200の電源がオンされ車両12が走行を開始してから制動装置を作動させて1回以上停車したか否か判別する(ステップS91)。
【0158】
制御装置208は、現在位置がarea_1の外であり、且つ、この所定条件を満たした後(ステップS91;Yes)、位置情報Pos_xと時刻情報timeを取得する(ステップS92)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS93)。
【0159】
一方、現在位置がarea_1の外であるか、又は、この所定条件を満たさない場合(ステップS91;No)、制御装置208はこの記録処理を終了する。すなわちこの場合、記憶装置206には走行履歴が記憶されない。
【0160】
例えば、制御装置208は、速度センサによる車速パルスや、ブレーキセンサによってフットブレーキの踏み動作、パーキングブレーキ(サイドブレーキ)の作動操作を検知して、車両12が停車したか否かを判別する。
【0161】
また、制御装置208は、取得した位置情報Pos_xの単位時間あたりの変化量を計算し、変化量が所定値以下(典型的にはゼロ)の場合に、車両12が停車していると判別してもよい。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例4】
【0162】
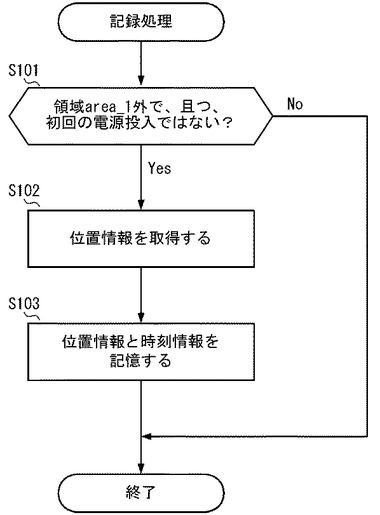
次に、本発明の他の実施形態について説明する。本実施形態も、制御装置208は所定の条件を満たした場合に走行履歴を記憶させる。以下、図20のフローチャートを用いて説明する。
【0163】
制御装置208は、所定条件「所定時間内に車載機200の電源入切がX回以上行われる」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。Xは1以上の整数である。
【0164】
これは、近年の環境問題への関心の高まりから、信号待ちなどで停車する際にエンジンをストップさせて停車する、いわゆるアイドリングストップが広く行われるようになってきており、上述の各実施形態のように電源をオンにした場所が必ずしも出発地とは限らないからである。そのため、本実施形態では、車両12が自宅11aを出発して、最初の電源切断(アイドリングストップ)後、一定時間(例えば3〜5分程度)以内に電源が再投入されたことをトリガーとする。
【0165】
具体的には、制御装置208は、車載機200の電源がオンされると、電源オンの時刻を記憶装置206に記憶する。記憶装置206には、電源がオンになった時刻を示す起動記録(ログ)が蓄積される。車載機200の電源がオンされると、制御装置208は、今回の電源投入が最初の電源投入であるか否か判別する(ステップS101)。典型的には、制御装置208は、この蓄積された起動記録を読み出し、前回電源がオンになった時刻から現在時刻まで所定時間(例えば3〜5分程度)以上経過していれば、今回の電源投入が最初の電源投入であると判別する。
【0166】
制御装置208は、現在位置がarea_1の外であり、且つ、この所定条件を満たした後(ステップS101;Yes)、位置情報Pos_xと時刻情報timeを取得する(ステップS102)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS103)。
【0167】
一方、現在位置がarea_1の外であるか、又は、この所定条件を満たさない場合(ステップS101;No)、制御装置208はこの記録処理を終了する。すなわちこの場合、記憶装置206には走行履歴が記憶されない。
【0168】
このように、本実施形態によれば、いわゆるアイドリングストップなどによって電源オン・オフが短期間に繰り返されることを契機に、取得した位置情報Pos_xなどを記憶するか否か、さらには位置情報Pos_xを送信するか否かを制御できる。なお、上記所定条件における所定時間、電源入切の回数X、今回の電源投入が最初の電源投入であるかを判別するための所定時間は、それぞれ任意に変更できることは言うまでもない。また、記憶装置206に蓄積される起動記録は、制御装置208によって定期的に削除されることが望ましい。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例5】
【0169】
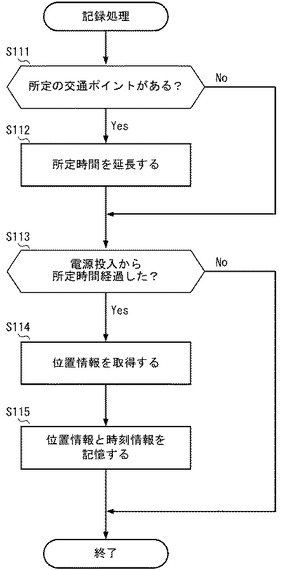
次に、本発明の他の実施形態について説明する。例えば、所定条件を設けて送信タイミングを決定するとしても、長時間踏切等で停車してしまうと、自宅11a近くで走行履歴の記憶あるいは送信を開始してしまう可能性がある。例えば、所定条件を「車載機200の電源投入後、所定時間が経過する」とした場合、踏切で停車することで所定時間が経過しても自宅11a近くにとどまってしまい、結果として送信タイミングの制御が功を奏さない場合もある。そこで、本実施形態では、踏切など、地図データに基づいて停車する時間が増えると予測される場所がある場合には、車載機200の電源投入から記憶装置206に走行履歴の蓄積を開始するまでの時間、あるいは、走行履歴の送信を開始するまでの時間を延長できるようにする。以下、図21のフローチャートを用いて説明する。
【0170】
本実施形態では、制御装置208は、所定条件「電源投入後、所定時間Tp経過する」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。この所定時間Tpの初期値はT1と表す。時間計測部207は、車載機200の電源が投入された時刻から経過した時間を計測する。
【0171】
具体的には、制御装置208は、記憶装置206から自宅11a付近の地図データを読み出して検索し、自宅11a近辺に車両12の停車時間が増えると予想される交通ポイントがあるか否か判別する(ステップS111)。この所定の交通ポイントとしては、例えば電車の踏切が挙げられる。制御装置208が検索する地図範囲は、自宅11aの位置を中心とした半径Rの円内である。Rは0以上の任意の数値であり予め決められている。
【0172】
所定の交通ポイントがあると判別された場合(ステップS111;Yes)、制御装置208は、初期値T1に延長時間Teを加算し、合計時間T1+Teを新たな所定時間Tpとする。すなわち、制御装置208は所定時間Tpを延長する(ステップS112)。一方、所定の交通ポイントがないと判別された場合(ステップS111;No)、制御装置208は所定時間Tpを延長せず、ステップS113の処理に進む。
【0173】
次に、制御装置208は、車載機200の電源投入から所定時間Tpが経過したか否か判別する(ステップS113)。
【0174】
所定時間Tpが経過したと判別された場合(ステップS113;Yes)、制御装置208は、位置情報Pos_xと時刻情報timeを取得する(ステップS114)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS115)。
【0175】
一方、所定時間Tpが経過していないと判別された場合(ステップS113;No)、
制御装置208は処理を終了する。この場合、制御装置208は位置情報Pos_xと時刻情報timeを記憶装置206に記憶しない。
【0176】
本実施形態では、制御装置208は、記憶装置206に位置情報Pos_xと時刻情報timeが新しく蓄積されたか(追加されたか)を監視し、追加された場合にこれらの情報を通信部201によって路側機100に送信させる。すなわち、記憶装置206に走行履歴の情報が記憶されなければ、路側機100には走行履歴の情報が送信されず、結果として個人情報を保護できる。
【0177】
なお、本実施形態では、地図データを検索して自宅11a近くに踏切があれば所定時間Tpを延長するようにしたが、他の交通ポイントがある場合に延長するようにしてもよい。例えば、電車の駅、大型ショッピングセンター、アミューズメントパーク、有名な史跡・名勝・観光地、有料道路の入り口などでもよい。さらには、自宅11a周辺の地形の高低差が大きい場合に延長するようにしてもよい。これらの情報は一般的なナビゲーションシステムの地図データに予め記録されていることが多いので、時間延長の可否の判断に有効である。
【0178】
応用例として、VICSモジュール201bによって自宅11a周辺で交通渋滞が発生している旨の交通情報を取得した場合に、所定時間Tpを延長してもよい。また、交通情報と合わせて天候情報も取得し、天候が悪ければ(例えば、雨、雪など)所定時間Tpを延長してもよい。この場合、交通情報とは別途に天候情報を取得できるようにしてもよいし、取得した交通情報の中に「大雨」「降雪」などのキーワードが含まれていればこれを天候情報のヒントとし所定時間Tpを延長するようにしてもよい。天候が悪いと走行に時間がかかる可能性があるからである。
【0179】
また、現在の時刻によって所定時間Tpを延長するようにしてもよい。例えば、昼間であれば所定時間Tp1、夜間であればTp2(>Tp1)というように使い分けてもよい。夜間のほうがスピードを出しにくかったり道路工事等による走行規制があったりすることが多く、走行に時間がかかる可能性があるからである。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例6】
【0180】
次に、本発明の他の実施形態について説明する。上述の各実施形態では、車載機200は、個人情報の保護の観点から、車両12の走行履歴を送信するタイミングを調整することで走行履歴を送信しないようにできるのであるが、場合によっては、逆に走行履歴を送信すべきケースもある。例えば、業務用の車両、タクシー、バス、緊急車両などでは、むしろ走行履歴を送信したほうが良いとも考えられる。
【0181】
そこで、記憶装置206は、車両12の車種、用途などの示す付加情報をさらに記憶することもできる。あるいは、記憶装置206は、上述の情報送信処理や記録処理を行うか否かを示すフラグを記憶してもよい。制御装置208は、これらの付加情報あるいはフラグに基づいて、上述の情報送信処理や記録処理を開始するか否かを判別し、開始すると判別した場合のみ各処理を開始する。
【0182】
なお、制御装置208は、付加情報あるいはフラグに基づいて上述の各処理を開始しないと判別した場合には、領域area_1に関わらず、また、各所定条件に関わらず、位置情報Pos_xと時刻情報timeを取得して路側機100に送信すればよい。
【0183】
尚、上記各実施形態を応用した種々の形態が考えられ、上記実施の形態に限られるものではない。
例えば、車載機200は、送信タイミングの設定方法としての第1の方法から第7の方法を、指定される代わりに自ら選択するようにしてもよい。
【0184】
即ち、車載機200は、記憶装置206に記憶された地図情報に基づいて、自宅11a周辺が首都圏型と判定した場合、領域area_1を小さくするとともに、第3の方法又は第4の方法を選択する。
【0185】
この第3の方法又は第4の方法は、走行時間、走行距離に基づいて領域area_1を判別するため、住宅密集度が高い首都圏型では、他の方法より有利である。そして、車載機200は、第3の方法を選択した次の日は第4の方法を選択することもできる。
【0186】
このように、送信タイミングの設定方法を切り換えることにより、この設定方法の判別が難しくなるため、個人情報を保護することができる。
【0187】
また、上記実施形態では、制御装置208が、記憶装置206から読み出した車両12の位置情報Pos_xが、領域area_1において取得したものか否かを判別し、この情報の送信する又は送信しないようにした。
【0188】
しかし、制御装置208は、自宅11aを出発してから予め設定された時間が経過するまでは、GPSモジュール201aにGPS電波を受信させないように制御することにより、送信を制御するようにしてもよい。
【0189】
上記実施形態では、DSRCの路側機100を用いた場合について説明した。しかし、これに限られるものではなく、例えば、DSRCの路側機100の代わりに、携帯電話、無線LANを用いた場合でも、上記実施形態に適用できる。
【0190】
また、上記実施形態では、車載機200が領域area_1において取得した位置情報Pos_x等を送信しないものとして説明した。しかし、ユーザによる許可・不許可の指示入力により、この位置情報Pos_x等の送信を停止したり、この送信停止を解除したりする構成(仕様)とすることもできる。
【0191】
また、上記実施形態では、移動体を車両12として説明した。しかし、これに限られるものではなく、移動体が人であり、車載機200の代わりにGPS等で位置を取得できる携帯端末等を用いても、本実施形態を適用できる。
【0192】
また、上記実施形態では、操作部204は、車両12の目的地(ただし出発地でもよいし出発地と目的地の両方でもよい)を示す指示入力をユーザから受け付けているが、制御装置208は、ユーザから受け付けた出発地又は目的地の位置を示す情報を記憶装置206にユーザ情報として記憶させ、このユーザ情報を適宜読み出して目的地あるいは出発地を設定してもよい。例えば、制御装置208は、ユーザのお気に入りの位置(典型的には自宅11aの位置)の入力を予めユーザから受け付けて記憶装置206に記憶させておいてもよい。これによって、車載機200によるナビゲーションを開始せずに移動し始めた場合にも、領域area_1において取得した位置情報等を送信しないようにすることができる。
【0193】
また、上記実施形態では、領域area_1を自宅11aを中心とする所定半径の円であるとしたが、他の手法により領域area_1を設定してもよい。例えば、出発地や目的地が存在する地域ブロック内を領域area_1としてもよい。ここで地域ブロックとは、例えば○○1丁目、などの住所名で表現される街の単位である。同じ郵便番号、あるいは、同じ市外局番が対応付けられている地域を1つのブロックとしてもよい。これらの情報を地図情報に予め記憶するようにしておき、制御装置208は、出発地又は目的地の住所(あるいは郵便番号、市外局番等)を読み出し、同じ町名(あるいは同じ郵便番号、同じ市外局番等)の地域を領域area_1に設定する。この場合、領域area_1は円ではなくさまざまな形状になる。制御装置208は、車両12の現在位置が領域area_1内(同じ町内等)であれば取得した位置情報Pos_x等を路側機100に送信しない(または、記憶装置206に記憶させない)。このようにすれば、例えば自宅11aのある街と異なる街に出ないと位置情報Pos_x等が交通情報配信サーバ300に送られることはないので、自宅11aの場所の特定が容易になってしまうような情報の漏洩を防ぐことができる。
【0194】
なお、出発地又は目的地の位置が、設定された領域11aの周縁部分であったり、街のはずれの"際"、すぐ隣が違う街であったりする場合には、出発直後に位置情報area_1の送信が開始されてしまう(到着直前まで位置情報area_1の送信を続けてしまう)ため、領域area_1を部分的に拡張することが望ましい。すなわち、上述の各実施形態を組み合わせ、例えば出発後所定時間以内は送信しない、出発後所定距離を走行するまでは送信しない、とする条件と併用すればよい。
【0195】
その他、本発明によれば、個人情報の保護あるいはカーセキュリティの観点より、任意の座標(緯度・経度)を指定して、その座標から予め定められた距離の範囲内にある座標を、路側機などの外部システムに送信しないようにする制御も可能である。例えば、自宅もしくは勤務先、又は(ユーザが指定する)特定の目的地を中心として、そこから所定の距離(例えば、100m)以内にある地点(例えば、ナビゲーション装置の電源を停止した場所、もしくは車両のエンジンを切った場所)の座標情報を路側機などに送信しないようにすることができる。これにより、毎日出発する地点である自宅や、出勤先である勤務地、又は他人に知られたくない特定の立ち寄り場所などを特定する座標情報の漏洩が有効に防止できることとなり、結果として個人情報保護やカーセキュリティにつながる。
【0196】
また、上記実施形態では、プログラムが、それぞれメモリ等に予め記憶されているものとして説明した。しかし、ナビゲーションシステムを、装置の全部又は一部として動作させ、あるいは、上述の処理を実行させるためのプログラムを、フレキシブルディスク、CD−ROM(CompactDiskRead-OnlyMemory)、DVD(DigitalVersatileDisk)、MO(MagnetoOpticaldisk)などのコンピュータ読み取り可能な記録媒体に格納して配布し、これを別のコンピュータにインストールし、上述の手段として動作させ、あるいは、上述の工程を実行させてもよい。
【0197】
さらに、インターネット上のサーバ装置が有するディスク装置等にプログラムを格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するものとしてもよい。
【符号の説明】
【0198】
11a 出発地(自宅)
11b 目的地
12 車両
13 探索対象道路
100 路側機
101 無線通信部
102 通信制御部
103 記憶装置
104 制御部
105 ROM
106 RAM
107 システムバス
200 車載機
201 通信部
202 音声処理部
203 出力部
204 操作部
205 I/O装置
206 記憶装置
207 時間計測部
208 制御装置
209 ROM
210 RAM
255 センサ群
300 交通情報配信サーバ
【技術分野】
【0001】
本発明は、移動体位置情報送信装置に関する。
【背景技術】
【0002】
VICS(VehicleInformationandCommunicationSystem:道路交通情報通信システム)は、FM多重放送、電波ビーコン、光ビーコンの3メディアを用いて、渋滞情報等の道路交通情報をリアルタイムにドライバーに提供するシステムである。
【0003】
また、DSRC(DedicatedShortRangeCommunications:狭域通信)により、路側に設置した無線設備(DSRC路側システム)と路上の車両に設置したDSRC送受信機(DSRC車載器)との間を高速の無線通信回線で結び、大容量のデータ通信を可能とするシステムがある(例えば、特許文献1参照)。
【0004】
また、OD(OriginandDestination)調査等のため、DSRCを利用し、車両がビーコンに接続して、車両の緯度、経度を位置情報としてビーコンに送信するようにしたナビゲーションシステムもある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−109989号公報(第7頁、図1)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、このようなOD調査において、必要とされるのは、あくまでも統計的な情報であって、個々の利用者の移動履歴そのものではない。
【0007】
その一方、車両が自宅を出発する往路、あるいは、車両が自宅に戻る復路において、位置情報をビーコンに送信すると、車両運転者の自宅が特定されてしまい、個人情報の流出にもつながりかねない。
【0008】
本発明は、このような従来の問題点に鑑みてなされたもので、個人情報を保護することが可能な移動体位置情報送信装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この目的を達成するため、本発明の第1の観点に係る移動体位置情報送信装置は、
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が投入されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源投入の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より短い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする。
【0010】
本発明の第2の観点に係る移動体位置情報送信装置は、
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が切断されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源切断の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より長い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする。
【発明の効果】
【0011】
本発明によれば、個人情報を保護することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態1に係るITSシステムの構成を示すブロック図である。
【図2】路側機の構成を示すブロック図である。
【図3】車載機の構成を示すブロック図である。
【図4】記憶装置が記憶する情報を示す図である。
【図5】制御装置が位置情報の送信タイミングを設定する第1の方法を示す図である。
【図6】制御装置が位置情報の送信タイミングを設定する第2の方法を示す図である。
【図7】制御装置が位置情報の送信タイミングを設定する第3、4の方法を示す図である。
【図8】制御装置が位置情報の送信タイミングを設定する第5の方法を示す図である。
【図9】制御装置が位置情報の送信タイミングを設定する第6の方法を示す図である。
【図10】制御装置が位置情報の送信タイミングを設定する第7の方法を示す図である。
【図11】制御装置が実行する第1の方法による情報送信処理(1)を示すフローチャートである。
【図12】制御装置が実行する第2の方法による情報送信処理(2)を示すフローチャートである。
【図13】制御装置が実行する第3の方法による情報送信処理(3)を示すフローチャートである。
【図14】制御装置が実行する第4の方法による情報送信処理(4)を示すフローチャートである。
【図15】制御装置が実行する第5の方法による情報送信処理(5)を示すフローチャートである。
【図16】制御装置が実行する第6の方法による情報送信処理(6)を示すフローチャートである。
【図17】制御装置が実行する第7の方法による情報送信処理(7)を示すフローチャートである。
【図18】実施形態2の記録処理を示すフローチャートである。
【図19】実施形態3の記録処理を示すフローチャートである。
【図20】実施形態4の記録処理を示すフローチャートである。
【図21】実施形態5の記録処理を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の実施形態に係るナビゲーションシステムの移動体位置情報送信装置を図面を参照して説明する。尚、本実施形態においては、ITS(IntelligentTransportSystems)システムを例に説明する。
【実施例1】
【0014】
ITSシステムは、図1に示すように、路側機100(本実施形態では、路側機100−1〜100−8)と、車載機200と、交通情報配信サーバ300と、を備える。
【0015】
車載機200は、後述するように、GPS(GlobalPositioningSystem)によって車載機200の現在位置を示す位置情報を取得する。車載機200は、取得した位置情報と、この位置情報を取得した時刻を示す時刻情報とを路側機100に送信する。
【0016】
ここで、車載機200は、位置情報と時刻情報をどの場所で取得したかによって、これらの情報を路側機100に送信するか否かを判定する。すなわち、車載機200は、領域area_1内で取得した位置情報と時刻情報については路側機100に送信せず、それ以外の領域で取得した位置情報と時刻情報については路側機100に送信する。例えば、この領域area_1は、車両12の出発地11aを中心とした所定半径の円内の領域である。出発地11aはユーザの自宅など個人を特定できるような場所である可能性が高く、個人情報保護のため、領域area_1内で取得した車両12の位置情報と時刻情報を送信しないように構成される。本実施形態では、領域area_1は所定半径の円内で示す領域であり、この円の半径は可変の値とすることができる。詳細については後述する。領域area_1は円ではなく他の任意の図形で表されるものであってもよい。
【0017】
路側機100は、それぞれ、所謂電波ビーコン、光ビーコン等から構成され、道路近傍や駐車場等に配置され、交通情報配信サーバ300から配信された交通情報を、近傍を通過する車両12の車載機200に送信する。
【0018】
また、路側機100は、OD調査のため、車載機200に、車両12の位置情報と時刻情報との送信を要求する。OD調査は、車両12等の移動に関する起点(Origin)と終点(Destination)との調査である。路側機100は、車載機200から位置情報や時刻情報を受信する。このように、路側機100は、車載機200と様々な情報を送受信する通信装置として機能する。
【0019】
そして、路側機100は、車載機200から受信した車両12の位置情報を交通情報配信サーバ300に送信する。交通情報配信サーバ300は、路側機100から受信した位置情報と時刻情報に基づいて統計処理を行って、交通計画などを作成するための参考資料となるデータを生成する。なお、交通情報配信サーバ300に蓄積されるデータの用途は本発明によって限定されない。
【0020】
次に、路側機100の構成について説明する。路側機100は、図2に示すように、無線通信部101と、通信制御部102と、記憶装置103と、制御部104と、ROM(ReadOnlyMemory)105と、RAM(RandomAccessMemory)106と、システムバス107と、を備える。
【0021】
無線通信部101と、通信制御部102と、記憶装置103と、制御部104と、ROM105と、RAM106とは、システムバス107を介して接続され、互いに命令やデータを転送する。
【0022】
無線通信部101は、電波信号、光信号等の無線信号により、路側機100の近傍を通過する車両12に設置された車載機200との間で情報を送受信する。無線通信部101は、例えば、交通情報配信サーバ300より提供された交通情報を車載機200に送信する。また、無線通信部101は、車載機200から送信されてくる車両ID、位置情報、時刻情報等を受信する。車両IDは、車載機200を識別するための情報である。これにより、路側機100は、どの車両が、いつ、どの位置にいるかを示すデータを取得できる。
【0023】
通信制御部102は、ITS通信網NW2を介して交通情報配信サーバ300に接続され、交通情報配信サーバ300から送信される交通情報を受信する。また、通信制御部102は、自機が取得した情報を、交通情報配信サーバ300に提供する。
【0024】
記憶装置103は、交通情報配信サーバ300から受信した交通情報や、自装置固有の交通情報を格納する。また、記憶装置103は、無線通信部101によって取得された車両ID、位置情報、時刻情報などの情報を記憶する。
【0025】
制御部104は、CPU(CentralProcessingUnit)などから構成され、路側機100全体の動作を制御する。例えば、制御部104は、記憶装置103に格納されている交通情報を、無線通信部101に供給して、この交通情報を送信させる。また、制御部104は、無線通信部101を介して車載機200から取得した情報を記憶装置103に格納する。
【0026】
また、制御部104は、記憶装置103に格納されている、車載機200から取得した情報を、通信制御部102及びITS通信網NW2を介して交通情報配信サーバ300に送信する。また、交通情報配信サーバ300から通信制御部102を介して取得した交通情報などを記憶装置103に格納する。
【0027】
ROM105は、この路側機100全体の動作制御に必要なオペレーティングシステム(OS)、各種のプログラム、データを記憶する。
【0028】
RAM106は、制御部104のワークエリアとして機能する。
【0029】
次に、車載機200の構成について説明する。本実施形態の車載機200は、車両12に設置されたナビゲーションシステムであり、例えば、カーナビゲーション装置と一体に構成される。一般的なカーナビゲーションの機能と共に、路側機100から送信された交通情報を再生して報知する機能を備える。
【0030】
また、車載機200は、OD調査等のため、車両12の緯度、経度を位置情報として路側機100に送信する機能を備える。さらに、車載機200は、個人情報保護のため、取得した位置情報などの送信タイミングを制御する機能を有する。なお、以下の説明においては、本発明をより理解しやすくするために、車両12の出発地をユーザの自宅とし、"出発地11a"を"自宅11a"と表記する。
【0031】
車載機200は、図3に示すように、通信部201と、音声処理部202と、出力部203と、操作部204と、I/O装置205と、記憶装置206と、時間計測部207と、制御装置208と、ROM209と、RAM210と、システムバス211と、を備える。
【0032】
通信部201と、音声処理部202と、出力部203と、操作部204と、I/O装置205と、記憶装置206と、時間計測部207と、制御装置208と、ROM209と、RAM210とは、システムバス211を介して接続され、命令やデータを転送する。
【0033】
通信部201は、GPSモジュール201a、VICS(VehicleInformationandCommunicationSystem)モジュール201bを含む。
【0034】
GPSモジュール201aは、所定のタイミングで複数のGPS衛星からのGPS電波を受信し、得られたGPS信号(測位データ)を制御装置208に供給する。
【0035】
VICSモジュール201bは、路側機100との間でDSRC(DedicatedShortRangeCommunication)方式により通信を行う。
【0036】
音声処理部202は、制御装置208から入力されたディジタルオーディオ信号をD/Aコンバータ(図示せず)でアナログオーディオ信号に変換して、スピーカ222に出力する。また、音声処理部202は、マイクロフォン223から入力された音声をA/Dコンバータ(図示せず)でディジタルオーディオ信号に変換して、制御装置208に入力する。これにより、ユーザはナビゲーション音声を聞いたり、音声を入力したりすることができる。
【0037】
出力部203は、LCD(LiquidCrystalDisplay)などのモニタ装置を備え、通信部201により取得されたナビゲーション画像やTV画像、あるいは記憶装置206等に予め記憶されたマップ画像などを表示する。
【0038】
操作部204はタッチパネル式入力装置などから構成され、ユーザによる指示入力に基づいて指示入力信号を生成して、制御装置208に入力する。
【0039】
I/O装置205は、DVD−ROM(DigitalVersatileDisk-ReadOnlyMemory)
ドライブを含み、所定の地図情報などを納めたDVD−ROMやCD−ROMからデータを読み出して制御装置208に入力する。
【0040】
また、I/O装置205は、速度センサ、走行距離センサ、方位センサ、ブレーキセンサ等のセンサ群225から送られてくる検出信号を取得し、制御装置208に供給する。
【0041】
また、I/O装置205は、IDカードに記録データを読み取るカードリーダ(図示せず)を備える。そして、I/O装置205は、IDカードがカードリーダに挿入されると、IDカードに記録されている車両IDの入力を受け付け、この車両IDを制御装置208に供給する。
【0042】
記憶装置206は、ハードディスクドライブ(HDD)を含み、探索対象道路の情報を含む地図情報(マップデータ)や各種情報を記憶する。なお、記憶装置206は、メモリカードなどの他のメモリを備えていてもよい。制御装置208は、I/O装置205を介して、地図情報を記憶したDVD−ROM等の記憶媒体からこの地図情報を読み出し、記憶装置206に予め書き込む。探索対象道路とは、車載機200が移動経路のナビゲーションをする際に、車両12の移動経路を探索するための対象となる道路のことである。
【0043】
時間計測部207は、車両12が自宅11aの前を出発してからの走行時間を計測するものである。時間計測部207は、計測した走行時間と現在の時刻情報とを、制御装置208に供給する。時間計測部207は、他の任意の地点間の走行時間を計測することもできる。
【0044】
制御装置208は、CPU(CentralProcessingUnit)やECU(ElectoronicContr
olUnit)などから構成され、車載機200全体の動作を制御する。制御装置208は、
コプロセッサ等を備えても良い。
【0045】
例えば、制御装置208は、GPSモジュール201aを介して受信したGPS信号に基づいて、車両12(車載機200)の位置情報を取得する。この位置情報は、車載機200を搭載した車両12が存在する位置を緯度と経度で表したデータである。
【0046】
さらに、制御装置208は、センサ群225に含まれている方向センサの出力をI/O装置205を介して取り込み、現在の車両12の進行方向を判別する。また、制御装置208は、走行距離センサの検出信号に基づいて自宅11aからの走行距離Lxを取得する。また、制御装置208は、ブレーキセンサの検出信号に基づいて車両12の制動装置(ここではパーキングブレーキあるいはサイドブレーキを指す)が作動しているか否かを判別する。
【0047】
また、制御装置208は、領域area_1内での位置情報の送信を停止するため、記憶装置208に記憶されている地図情報を参照し、この領域area_1内で取得した位置情報を記憶装置206には記憶しないようにする。
【0048】
そして、制御装置208は、時間計測部207から時刻情報timeとを取得し、図4に示すように、I/O装置205から供給された車両IDと、時刻情報timeと、車両12の位置情報Pos_xと、を対応付けて記憶装置206に記憶する。
なお、制御装置208は、どの場所で取得したかに関わらず、取得した位置情報や時刻情報等を記憶装置208に記憶させるようにしてもよい。ただし、この場合、制御装置208は、領域area_1内で取得した情報については路側機100に送信しない。
【0049】
また、制御装置208は、VICSモジュール201bを介して路側機100からの交通情報を受信し、受信した交通情報に含まれている再生タイミング制御データ(パラメータ)に基づいて、これを再生する。すなわち、制御装置208は、路側機100から送られてきた様々な情報を逐次出力部203に出力させるだけでなく、ある情報を所定の時刻や所定のタイミングになったときに出力させることもできる。
【0050】
また、制御装置208は、領域area_1外において、近傍の路側機100から車両12の位置情報Pos_xを送信する旨の要求があると、車両IDと車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出して通信部201のVICSモジュール201bに供給する。そして、制御装置208は、この車両IDと位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。この位置情報Pos_xと時刻情報timeとは、前述のようにOD調査等に用いられる。
【0051】
上述のように、制御装置208は、個人情報保護のため、領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_xを送信しない。
【0052】
そして、制御装置208は、車両12がこの領域area_1外に出ると、それ以降にGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて送信する。再び車両12が領域area_1内に入った場合には同様に送信しないことは言うまでもない。このような送信タイミングの設定方法として、複数の方法が考えられる。
【0053】
まず、第1の方法は、探索対象の道路に進入したときから路側機100に位置情報Pos_xを送信する方法である。以下の説明では、図1に示すように、車両12は、自宅11aを出発地として出発し、目的地11bまで移動するものとする。
【0054】
図5に示すように、探索対象道路13aは、領域area_1外の道路であって、車両12の移動経路探索用の道路である。制御装置208は、車両12が探索対象道路13aに進入した後、GPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。探索対象道路13aに進入する前、すなわち、自宅11aから交差点510で探索対象道路13aに入るまでは、制御装置208はこれらの情報を送信しない。
【0055】
ここで、制御装置208は、この領域area_1の大きさ(本実施形態では円の半径)を、単位面積当たりの道路の本数に基づいて住宅密集度を推定する。住宅密集度が高い首都圏型と住宅が数キロメートルに1軒程度の過疎型とを比較した場合、道路の本数を同一とすると、住宅密集度が高い首都圏型では、道路の密集度も高い。そのため、領域area_1を狭くする。一方、住宅密集度が低い過疎型では、道路の密集度も高い。そのため、領域area_1を広くする。いずれにしても、領域area_1は、自宅11aの位置が容易に特定可能か否かを基準にして設定される。
言い換えれば、制御装置208は、自宅11a付近の住宅密集度が高ければ領域area_1の円の半径を小さくし、住宅密集度が低ければ領域area_1の円の半径を大きくする。円の半径は住宅密集度に対して単調減少(典型的には反比例)する。なお、領域area_1を円ではない他の形状の任意の図形として表す場合、制御装置208は、領域area_1内の面積が住宅密集度に対して単調減少するように領域area_1を設定する。
【0056】
第2の方法は、路側機100の前を通過したときにGPSモジュール201aが取得した車両12の位置情報Pos_xを、路側機100に送信する方法である。図6に示すように、制御装置208は、車両12が路側機100の前を通過すると、GPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。すなわち、制御装置208は、車両12の現在位置が路側機100から所定距離以内か否かを判別し、所定距離以内と判別された場合に路側機100に送信する。
【0057】
第3の方法は、自宅11aを出発してから現在までの経過時間が、車両12の領域area_1外に出たか否かを判別するために予め設定された閾時間を越えたとき、領域area_1外であると判別した時刻から位置情報Pos_x等を送信する方法である。
【0058】
制御装置208は、時間計測部207が計測した経過時間を取得する。制御装置208は、図7に示すように、この経過時間Txが予め設定された閾時間T_thを越えたとき、車両12が領域area_1外に出たと判別する。そして、制御装置208は、領域area_1外に出たと判別された時刻から、GPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。ROM209又は記憶装置206は、この閾時間T_thを予め記憶し、制御装置208は適宜これを読み出して判別する。
【0059】
第4の方法は、自宅11aを出発してから現在位置までの走行距離が、車両12の領域area_1通過を判別するために予め設定された閾距離を越えたとき、領域area_1外であると判別した位置から位置情報Pos_x等を送信する方法である。
【0060】
制御装置208は、センサ群225の走行距離センサが計測した自宅11aを出発してからの走行距離Lxを、I/O装置205を介して取得する。制御装置208は、図7に示すように、この走行距離Lxが、領域area_1外に出たかを判別するために予め設定された閾距離L_thを越えたとき、車両12が領域area_1外に出たと判別する。ROM209又は記憶装置206は、この閾距離L_th予めを記憶し、制御装置208は適宜これを読み出して判別する。
【0061】
そして、制御装置208は、路側機100からの送信要求に対し、車両12が領域area_1外に出たと判別した位置からGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0062】
第5の方法は、交通情報が提供される道路として、VICSリンクが設定された道路に進入したときから、位置情報Pos_x等を送信する方法である。例えば、図8に示すように、探索対象道路13bには、主要交差点毎に道路を区切った単位としてVICSリンクが設定され、探索対象道路13aには設定されていない。VICSリンクとは、探索対象道路を交差点等によって区間に区切り、交通情報を提供する際の単位となるものである。したがって、VICSリンクが設定されていれば、ユーザはその道路についての交通情報の提供を受けることができる。
【0063】
制御装置208は、車両12がこの探索対象道路13bに進入したときからGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0064】
第6の方法は、車載機200に渋滞情報が供給されてから車両12の位置情報Pos_xを送信する方法である。路側機100が設置されたエリアによって渋滞状況が異なる。制御装置208は、車両12が渋滞情報が供給される位置(すなわち渋滞している道路)にいるか否かを判別する。そして、制御装置208は、図9に示すように、渋滞情報が供給されてからGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0065】
第7の方法は、次の探索対象道路から位置情報Pos_xを送信する方法である。図10に示すように、探索対象道路13cは、探索対象道路13aに進入した後、さらに進入した次の探索対象道路である。次の探索対象道路とは、道路種別の異なる探索対象道路、もしくは、同一種別であっても1つ以上の交差点通過後の探索対象道路を意味する。
【0066】
制御装置208は、地図情報に基づいて現在車両12が走行している道路がどの探索対象道路かを判別し、次の探索対象道路13cに進入したときからGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信する。
【0067】
尚、制御装置208は、車両12が目的地11bから自宅11aに向かって移動する場合についても同様であり、領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを送信しない。
【0068】
また、制御装置208は、目的地11bについても同様の処理を行う。即ち、制御装置208は、目的地11bを中心とした領域area_2(目的地11bの特定が容易な領域)を設定し、この領域area_2内においてGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとを送信しない。
【0069】
ROM209には、車載機200全体の動作制御に必要なオペレーティングシステム(OS)のプログラムや各種のデータが記録される。
【0070】
ROM209は、車両12の位置情報Pos_xと時刻情報timeとの送信タイミングを設定する設定情報として、例えば第1の方法〜第7の方法に例示したような方法による送信処理をするためのプログラムを記憶する。制御装置208は、第1の方法〜第7の方法のうちいずれかが指定されると、指定された方法のプログラムを読み出す。
【0071】
そして、制御装置208は、読み出した方法に従って車両12の位置情報Pos_xと時刻情報timeとを送信するタイミングを設定し、設定したタイミングで車両12の位置情報Pos_xと時刻情報timeとを対応付けて路側機100に送信するように制御する。
【0072】
RAM210は、データやプログラムを一時的に記憶するためのもので、通信部201により取得されたデータ、DVD−ROMから読み出したデータ等が保持される。
また、制御装置208は、RAM210をワークメモリとして使用する。
【0073】
交通情報配信サーバ300は、種々の交通情報を生成し、生成した交通情報を路側機100別に配信するものである。
【0074】
交通情報配信サーバ300は、各路側機100から取得した車両12等の位置情報Pos_xと時刻情報timeとに基づいて、渋滞状況を判別する。
【0075】
そして、交通情報配信サーバ300は、判別した渋滞状況に基づいて渋滞情報を生成し、この渋滞情報を各路側機100に配信する。
【0076】
(位置情報等の送信処理)
次に、本実施形態に係るナビゲーションシステムの動作を説明する。本実施形態では、車載機200は、操作部204がユーザから車両12の目的地(ここでは自宅11a)の入力を受け付け、制御装置208が車両12の出発地から目的地11bまでの移動経路の道案内をする(ナビゲーションする)場面を想定して説明する。
車両12のエンジンのスイッチがオンすると、車載機200のGPSモジュール201aは、複数のGPS衛星からのGPS電波を受信し、制御装置208は、車両12の位置情報Pos_xを取得する。
【0077】
制御装置208は、I/O装置205から供給された車両IDと、時間計測部207から取得した時刻情報timeと、取得した車両12の位置情報Pos_xと、走行距離Lxと、を記憶装置206に記憶する。
【0078】
車両12は、自宅11aの前から出発し、目的地11bに向かって移動する。制御装置208は、GPSモジュール201aによって位置情報を取得する毎に、これらの情報を記憶装置206に記憶させ蓄積する。
【0079】
制御装置208は、近傍の路側機100から車両12の位置情報Pos_x等の送信要求があると、第1の方法〜第7の方法のうちから指定された方法のプログラムをROM09から読み出す。そして、このプログラムに従って、車両12の位置情報Pos_x等を送信する。制御装置208は、いずれの方法によって送信するかを指定する入力を予めユーザから受け付けて、受け付けた方法で送信する。
【0080】
第1の方法が指定された場合、制御装置208は、図11に示すフローチャートに従って、情報送信処理(1)を実行する。
【0081】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS11)。
【0082】
制御装置208は、参照した地図情報に基づいて探索対象道路に進入したか否かを判定する(ステップS12)。
【0083】
探索対象道路に進入していないと判定した場合(ステップS12;No)、制御装置208は、この情報送信処理(1)を終了させる。
【0084】
探索対象道路に進入したと判定した場合(ステップS12;Yes)、制御装置208は、車両12の位置情報Pos_xと、この位置情報Pos_xに対応付けられた時刻情報timeとを、記憶装置206から読み出す(ステップS13)。例えば、制御装置208は、記憶装置206に記憶された位置情報Pos_xのうち、まだ路側機100に送信していないもので、且つ、最も古い時刻情報が対応付けられているものを1つ取得する。
【0085】
制御装置208は、参照した地図情報に基づいて、読み出した位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報であるか否かを判定する(ステップS14)。
【0086】
読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS14;No)、制御装置208は、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS15)。
【0087】
制御装置208は、記憶装置206から読み出していない情報がまだあるか否かを判定する(ステップS16)。
【0088】
読み出していない情報がまだあると判定した場合(ステップS16;Yes)、制御装置208は、すべての情報を読み出すまでステップS13乃至S16の処理を繰り返す。
【0089】
一方、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報であると判定した場合(ステップS14;Yes)、制御装置208は、読み出した位置情報Pos_xと時刻情報timeとを送信しない。この場合、制御装置208は、領域area_1内で取得したと判定された位置情報Pos_xと時刻情報timeとを削除してもよい。ただし、削除するタイミングはこれに限られず任意に変更してよい。
【0090】
そして、記憶装置208からすべての情報を読み出したと判定した場合(ステップS16;No)、制御装置208は、この情報送信処理(1)を終了させる。なお、制御装置208は、すべての位置情報Pos_xと時刻情報timeを正常に送信できた場合、これらの情報を記憶装置206から削除してもよい。
【0091】
第2の方法が指定された場合、制御装置208は、図12に示すフローチャートに従って、情報送信処理(2)を実行する。
【0092】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS21)。
【0093】
制御装置208は、参照した地図情報に基づいて路側機100近傍を通過したか否かを判定する(ステップS22)。例えば、制御装置208は、路側機100から所定距離以内に車両12(車載機200)が存在するか否かによって判定する。
【0094】
路側機100を通過していないと判定した場合(ステップS22;No)、制御装置208は、この情報送信処理(2)を終了させる。
【0095】
路側機100を通過したと判定した場合(ステップS22;Yes)、制御装置208は、車両12の位置情報Pos_xと、この位置情報Pos_xに対応付けられた時刻情報timeとを記憶装置206から読み出す(ステップS23)。
【0096】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS24;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS25)。
【0097】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS24;Yes)、制御装置208は、これらの情報を送信しない。
【0098】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS26;Yes、S23〜S25)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS26;No)、この情報送信処理(2)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0099】
第3の方法が指定された場合、制御装置208は、図13に示すフローチャートに従って、情報送信処理(3)を実行する。
【0100】
制御装置208は、時間計測部207から走行時間Txを取得する(ステップS31)。例えば、時間計測部207は、エンジンが始動して車載機200の電源がオンになってから現在時刻までの経過時間を計測する。あるいは、電源がオンになり車両12の移動速度がゼロでないと判別したときから現在時刻までの経過時間を計測する。
【0101】
制御装置208は、取得した走行時間Txが予め設定された閾時間T_thを越えたか否かを判定する(ステップS32)。
【0102】
取得した走行時間Txが予め設定された閾時間T_thを越えていないと判定した場合(ステップS32;No)、制御装置208は、この情報送信処理(3)を終了させる。
【0103】
取得した走行時間Txが予め設定された閾時間T_thを越えたと判定した場合(ステップS32;Yes)、制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS33)。
【0104】
制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS34)。
【0105】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS35;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS36)。
【0106】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS35;Yes)、制御装置208は、これらの情報を送信しない。
【0107】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS37;Yes、S34〜S36)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS37;No)、この情報送信処理(3)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0108】
第4の方法が指定された場合、制御装置208は、図14に示すフローチャートに従って、情報送信処理(4)を実行する。
【0109】
制御装置208は、走行距離Lxを取得する(ステップS41)。例えば、制御装置208は、自宅11aを出発してから現在位置までに通った経路の長さを合計して、走行距離Lxを計算する。
【0110】
制御装置208は、取得した走行距離Lxが予め設定された閾距離L_thを越えたか否かを判定する(ステップS42)。
【0111】
取得した走行距離Lxが予め設定された閾距離L_thを越えていないと判定した場合(ステップS42;No)、制御装置208は、この情報送信処理(4)を終了させる。
【0112】
取得した走行距離Lxが予め設定された閾距離L_thを越えたと判定した場合(ステップS42;Yes)、制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS43)。
【0113】
制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS44)。
【0114】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS45;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS46)。
【0115】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS45;Yes)、制御装置208は、これらの情報を送信しない。
【0116】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS47;Yes、S44〜S46)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS47;No)、この情報送信処理(4)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0117】
第5の方法が指定された場合、制御装置208は、図15に示すフローチャートに従って、情報送信処理(5)を実行する。
【0118】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS51)。
【0119】
制御装置208は、参照した地図情報に基づいてVICSリンクが設定された道路に進入したか否かを判定する(ステップS52)。
【0120】
VICSリンクが設定された道路に進入していないと判定した場合(ステップS52;No)、制御装置208は、この情報送信処理(5)を終了させる。
【0121】
VICSリンクが設定された道路に進入したと判定した場合(ステップS52;Yes)、制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS53)。
【0122】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS54;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS55)。
【0123】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS54;Yes)、制御装置208は、これらの情報を送信しない。
【0124】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS56;Yes、S53〜S55)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS56;No)、この情報送信処理(5)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0125】
第6の方法が指定された場合、制御装置208は、図16に示すフローチャートに従って、情報送信処理(6)を実行する。
【0126】
制御装置208は、渋滞情報を受信したか否かを判定する(ステップS61)。
【0127】
渋滞情報を受信していないと判定した場合(ステップS61;No)、制御装置208は、この情報送信処理(6)を終了させる。
【0128】
渋滞情報を受信したと判定した場合(ステップS621;Yes)、制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS62)。
【0129】
制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS63)。
【0130】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS64;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS65)。
【0131】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS64;Yes)、制御装置208は、これらの情報を送信しない。
【0132】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS66;Yes、S63〜S65)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS66;No)、この情報送信処理(6)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0133】
第7の方法が指定された場合、制御装置208は、図17に示すフローチャートに従って、情報送信処理(7)を実行する。
【0134】
制御装置208は、記憶装置206に記憶されている地図情報を参照する(ステップS71)。
【0135】
制御装置208は、参照した地図情報に基づいて次の探索対象道路に進入したか否かを判定する(ステップS72)。
【0136】
次の探索対象道路に進入していないと判定した場合(ステップS72;No)、制御装置208は、この情報送信処理(7)を終了させる。
【0137】
次の探索対象道路に進入したと判定した場合(ステップS72;Yes)、制御装置208は、車両12の位置情報Pos_xと時刻情報timeとを記憶装置206から読み出す(ステップS73)。
【0138】
そして、第1の方法が指定された場合と同様に、制御装置208は、読み出した車両12の位置情報Pos_xと時刻情報timeとが領域area_1内において取得した情報ではないと判定した場合(ステップS74;No)、取得した位置情報Pos_xと時刻情報timeとを路側機100に送信する(ステップS75)。
【0139】
一方、読み出したこれらの情報が領域area_1内において取得した情報であると判定した場合(ステップS74;Yes)、制御装置208は、これらの情報を送信しない。
【0140】
制御装置208は、このような処理を、記憶装置206に記憶されたすべての情報について行い(ステップS76;Yes、S73〜S75)、記憶装置208からすべての情報を読み出したと判定した場合(ステップS76;No)、この情報送信処理(7)を終了させる。なお、この方法においても、制御装置208は、記憶装置206に蓄積された位置情報Pos_xなどの情報を削除してもよい。
【0141】
このように車載機200の制御装置208が情報送信処理(1)〜(7)のいずれかを実行すると、近傍の路側機100の無線通信部101は、車両12の車載機200から、車両12の車両IDと位置情報Pos_xと時刻情報timeとを受信する。
【0142】
この路側機100は、無線通信部101が受信した車両12の車両IDと位置情報Pos_xと時刻情報timeとを記憶装置103に格納し、格納したこれらの情報を通信制御部102及びITS通信網NW2を介して交通情報配信サーバ300に送信する。
【0143】
交通情報配信センター300は、路側機100が送信した情報を受信し、受信した情報に基づいて種々の交通情報を生成する。
【0144】
以上説明したように、本実施形態によれば、車載機200の制御装置208は、自宅11aを中心とする自宅11aの位置の特定が容易な領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_x等を送信しない一方、車両12等が領域area_1外に出た後に、GPSモジュール201aが取得した車両12の位置情報Pos_x等を路側機100に送信するようにした。
【0145】
従って、送信された位置情報Pos_xから自宅11aを特定することができず、個人情報の流出を防止することができ、個人情報を保護することができる。
【0146】
また、制御装置208が目的地11bを中心として目的地11bの特定が可能な領域においてGPSモジュール201aが取得した車両12の位置情報Pos_xと時刻情報timeとの送信を停止するようにした。従って、目的地11bの特定も困難になり、個人情報の保護を、さらに進めることができる。
【0147】
なお、本実施形態では、車載機200が自宅11aから目的地11bまでの移動経路のナビゲーションをする場面を想定して説明したが、必ずしもナビゲーションと共に上記処理を行わなくてもよい。すなわち、ユーザによって目的地11bが指定されなくても、自宅11aの位置を中心とした領域area_1においてGPSモジュール201aが取得した車両12の位置情報Pos_x等を送信しないように構成することができる。
【実施例2】
【0148】
次に、本発明の他の実施形態について説明する。上述の実施形態では、制御装置208は、車載機200の電源がオンになってから位置情報Pos_xなどの走行履歴を記憶しているが、本実施形態は、車載機200の電源オン後に所定の条件を満たした場合に走行履歴を記憶させるようにする点で異なる。以下、図18のフローチャートを用いて説明する。
【0149】
制御装置208は、所定条件「車載機200の電源オン後、1カ所以上の交差点を通過する」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。
【0150】
具体的には、制御装置208は、記憶装置206に記憶されている地図データと、GPSモジュール201aにより取得した位置情報とに基づいて、自宅11aから現在地までに通った経路に1カ所以上の交差点があるか否か判別する(ステップS81)。例えば、この交差点は、地図データとして交差点の名称が付けられた比較的大きな交差点である。また、交差点は、信号機の設置された交差点でもよい。なお、交差点は小さな十字路やT字路ではなく比較的大きめのものであることが望ましい。
【0151】
制御装置208は、現在位置がarea_1の外であり、且つ、この所定条件を満たした後(ステップS81;Yes)、位置情報Pos_xと時刻情報timeを取得する(ステップS82)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS83)。
【0152】
一方、現在位置がarea_1の外であるか、又は、この所定条件を満たさない場合(ステップS81;No)、制御装置208はこの記録処理を終了する。すなわちこの場合、記憶装置206には走行履歴が記憶されない。
【0153】
さらに、所定条件として、「車載機200の電源オン後、1カ所以上の交差点を左折又は右折して通過する」を定義してもよい。この場合、制御装置208は、ステップS81で、地図データと通過経路とに基づいて、左折又は右折によって進行方向を変えて通過した交差点が1カ所以上あるか否かを判別すればよい。右左折の判断は、制御装置208が地図データと通過経路とを比較し、方向指示器を作動させて進路変更しなければならない場所を実際に通過したか否かによって行う。なお、制御装置208は、車両12の方向指示器がユーザによって作動されたか否かによって右左折を判断してもよい。
【0154】
本実施形態では、通過した交差点の数を1つとしたが、2以上の任意の数でもよいことは言うまでもない。また、「交差点を通過する」とは、交差点の直進、左折、右折による通過のどれでもよいし、例えばこれらを組み合わせて「Nカ所以上の交差点を左折又は右折し、Mカ所以上の交差点を直進して通過する」というような条件としてもよい。N、Mは0以上の整数である。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例3】
【0155】
次に、本発明の他の実施形態について説明する。本実施形態も、制御装置208は所定の条件を満たした場合に走行履歴を記憶させる。以下、図19のフローチャートを用いて説明する。
【0156】
制御装置208は、所定条件「車載機200の電源オン後、走行を開始してから1回以上停車する」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。
【0157】
具体的には、制御装置208は、ブレーキセンサからの入力に基づいて、車載機200の電源がオンされ車両12が走行を開始してから制動装置を作動させて1回以上停車したか否か判別する(ステップS91)。
【0158】
制御装置208は、現在位置がarea_1の外であり、且つ、この所定条件を満たした後(ステップS91;Yes)、位置情報Pos_xと時刻情報timeを取得する(ステップS92)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS93)。
【0159】
一方、現在位置がarea_1の外であるか、又は、この所定条件を満たさない場合(ステップS91;No)、制御装置208はこの記録処理を終了する。すなわちこの場合、記憶装置206には走行履歴が記憶されない。
【0160】
例えば、制御装置208は、速度センサによる車速パルスや、ブレーキセンサによってフットブレーキの踏み動作、パーキングブレーキ(サイドブレーキ)の作動操作を検知して、車両12が停車したか否かを判別する。
【0161】
また、制御装置208は、取得した位置情報Pos_xの単位時間あたりの変化量を計算し、変化量が所定値以下(典型的にはゼロ)の場合に、車両12が停車していると判別してもよい。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例4】
【0162】
次に、本発明の他の実施形態について説明する。本実施形態も、制御装置208は所定の条件を満たした場合に走行履歴を記憶させる。以下、図20のフローチャートを用いて説明する。
【0163】
制御装置208は、所定条件「所定時間内に車載機200の電源入切がX回以上行われる」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。Xは1以上の整数である。
【0164】
これは、近年の環境問題への関心の高まりから、信号待ちなどで停車する際にエンジンをストップさせて停車する、いわゆるアイドリングストップが広く行われるようになってきており、上述の各実施形態のように電源をオンにした場所が必ずしも出発地とは限らないからである。そのため、本実施形態では、車両12が自宅11aを出発して、最初の電源切断(アイドリングストップ)後、一定時間(例えば3〜5分程度)以内に電源が再投入されたことをトリガーとする。
【0165】
具体的には、制御装置208は、車載機200の電源がオンされると、電源オンの時刻を記憶装置206に記憶する。記憶装置206には、電源がオンになった時刻を示す起動記録(ログ)が蓄積される。車載機200の電源がオンされると、制御装置208は、今回の電源投入が最初の電源投入であるか否か判別する(ステップS101)。典型的には、制御装置208は、この蓄積された起動記録を読み出し、前回電源がオンになった時刻から現在時刻まで所定時間(例えば3〜5分程度)以上経過していれば、今回の電源投入が最初の電源投入であると判別する。
【0166】
制御装置208は、現在位置がarea_1の外であり、且つ、この所定条件を満たした後(ステップS101;Yes)、位置情報Pos_xと時刻情報timeを取得する(ステップS102)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS103)。
【0167】
一方、現在位置がarea_1の外であるか、又は、この所定条件を満たさない場合(ステップS101;No)、制御装置208はこの記録処理を終了する。すなわちこの場合、記憶装置206には走行履歴が記憶されない。
【0168】
このように、本実施形態によれば、いわゆるアイドリングストップなどによって電源オン・オフが短期間に繰り返されることを契機に、取得した位置情報Pos_xなどを記憶するか否か、さらには位置情報Pos_xを送信するか否かを制御できる。なお、上記所定条件における所定時間、電源入切の回数X、今回の電源投入が最初の電源投入であるかを判別するための所定時間は、それぞれ任意に変更できることは言うまでもない。また、記憶装置206に蓄積される起動記録は、制御装置208によって定期的に削除されることが望ましい。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例5】
【0169】
次に、本発明の他の実施形態について説明する。例えば、所定条件を設けて送信タイミングを決定するとしても、長時間踏切等で停車してしまうと、自宅11a近くで走行履歴の記憶あるいは送信を開始してしまう可能性がある。例えば、所定条件を「車載機200の電源投入後、所定時間が経過する」とした場合、踏切で停車することで所定時間が経過しても自宅11a近くにとどまってしまい、結果として送信タイミングの制御が功を奏さない場合もある。そこで、本実施形態では、踏切など、地図データに基づいて停車する時間が増えると予測される場所がある場合には、車載機200の電源投入から記憶装置206に走行履歴の蓄積を開始するまでの時間、あるいは、走行履歴の送信を開始するまでの時間を延長できるようにする。以下、図21のフローチャートを用いて説明する。
【0170】
本実施形態では、制御装置208は、所定条件「電源投入後、所定時間Tp経過する」を満たす場合、それ以降に取得した位置情報Pos_xと時刻情報timeを路側機100に送信する。この条件を満たさない場合、これらの情報を路側機100に送信しない。この所定時間Tpの初期値はT1と表す。時間計測部207は、車載機200の電源が投入された時刻から経過した時間を計測する。
【0171】
具体的には、制御装置208は、記憶装置206から自宅11a付近の地図データを読み出して検索し、自宅11a近辺に車両12の停車時間が増えると予想される交通ポイントがあるか否か判別する(ステップS111)。この所定の交通ポイントとしては、例えば電車の踏切が挙げられる。制御装置208が検索する地図範囲は、自宅11aの位置を中心とした半径Rの円内である。Rは0以上の任意の数値であり予め決められている。
【0172】
所定の交通ポイントがあると判別された場合(ステップS111;Yes)、制御装置208は、初期値T1に延長時間Teを加算し、合計時間T1+Teを新たな所定時間Tpとする。すなわち、制御装置208は所定時間Tpを延長する(ステップS112)。一方、所定の交通ポイントがないと判別された場合(ステップS111;No)、制御装置208は所定時間Tpを延長せず、ステップS113の処理に進む。
【0173】
次に、制御装置208は、車載機200の電源投入から所定時間Tpが経過したか否か判別する(ステップS113)。
【0174】
所定時間Tpが経過したと判別された場合(ステップS113;Yes)、制御装置208は、位置情報Pos_xと時刻情報timeを取得する(ステップS114)。そして、取得した位置情報Pos_xと時刻情報timeを記憶装置206に記憶させる(ステップS115)。
【0175】
一方、所定時間Tpが経過していないと判別された場合(ステップS113;No)、
制御装置208は処理を終了する。この場合、制御装置208は位置情報Pos_xと時刻情報timeを記憶装置206に記憶しない。
【0176】
本実施形態では、制御装置208は、記憶装置206に位置情報Pos_xと時刻情報timeが新しく蓄積されたか(追加されたか)を監視し、追加された場合にこれらの情報を通信部201によって路側機100に送信させる。すなわち、記憶装置206に走行履歴の情報が記憶されなければ、路側機100には走行履歴の情報が送信されず、結果として個人情報を保護できる。
【0177】
なお、本実施形態では、地図データを検索して自宅11a近くに踏切があれば所定時間Tpを延長するようにしたが、他の交通ポイントがある場合に延長するようにしてもよい。例えば、電車の駅、大型ショッピングセンター、アミューズメントパーク、有名な史跡・名勝・観光地、有料道路の入り口などでもよい。さらには、自宅11a周辺の地形の高低差が大きい場合に延長するようにしてもよい。これらの情報は一般的なナビゲーションシステムの地図データに予め記録されていることが多いので、時間延長の可否の判断に有効である。
【0178】
応用例として、VICSモジュール201bによって自宅11a周辺で交通渋滞が発生している旨の交通情報を取得した場合に、所定時間Tpを延長してもよい。また、交通情報と合わせて天候情報も取得し、天候が悪ければ(例えば、雨、雪など)所定時間Tpを延長してもよい。この場合、交通情報とは別途に天候情報を取得できるようにしてもよいし、取得した交通情報の中に「大雨」「降雪」などのキーワードが含まれていればこれを天候情報のヒントとし所定時間Tpを延長するようにしてもよい。天候が悪いと走行に時間がかかる可能性があるからである。
【0179】
また、現在の時刻によって所定時間Tpを延長するようにしてもよい。例えば、昼間であれば所定時間Tp1、夜間であればTp2(>Tp1)というように使い分けてもよい。夜間のほうがスピードを出しにくかったり道路工事等による走行規制があったりすることが多く、走行に時間がかかる可能性があるからである。
なお、本実施形態で採用した所定条件を上述の実施形態1において用いることもできる。すなわち、この所定条件を満たした場合に、制御装置208が通信部201を制御して位置情報を路側機100へ送信させるようにしてもよい。
【実施例6】
【0180】
次に、本発明の他の実施形態について説明する。上述の各実施形態では、車載機200は、個人情報の保護の観点から、車両12の走行履歴を送信するタイミングを調整することで走行履歴を送信しないようにできるのであるが、場合によっては、逆に走行履歴を送信すべきケースもある。例えば、業務用の車両、タクシー、バス、緊急車両などでは、むしろ走行履歴を送信したほうが良いとも考えられる。
【0181】
そこで、記憶装置206は、車両12の車種、用途などの示す付加情報をさらに記憶することもできる。あるいは、記憶装置206は、上述の情報送信処理や記録処理を行うか否かを示すフラグを記憶してもよい。制御装置208は、これらの付加情報あるいはフラグに基づいて、上述の情報送信処理や記録処理を開始するか否かを判別し、開始すると判別した場合のみ各処理を開始する。
【0182】
なお、制御装置208は、付加情報あるいはフラグに基づいて上述の各処理を開始しないと判別した場合には、領域area_1に関わらず、また、各所定条件に関わらず、位置情報Pos_xと時刻情報timeを取得して路側機100に送信すればよい。
【0183】
尚、上記各実施形態を応用した種々の形態が考えられ、上記実施の形態に限られるものではない。
例えば、車載機200は、送信タイミングの設定方法としての第1の方法から第7の方法を、指定される代わりに自ら選択するようにしてもよい。
【0184】
即ち、車載機200は、記憶装置206に記憶された地図情報に基づいて、自宅11a周辺が首都圏型と判定した場合、領域area_1を小さくするとともに、第3の方法又は第4の方法を選択する。
【0185】
この第3の方法又は第4の方法は、走行時間、走行距離に基づいて領域area_1を判別するため、住宅密集度が高い首都圏型では、他の方法より有利である。そして、車載機200は、第3の方法を選択した次の日は第4の方法を選択することもできる。
【0186】
このように、送信タイミングの設定方法を切り換えることにより、この設定方法の判別が難しくなるため、個人情報を保護することができる。
【0187】
また、上記実施形態では、制御装置208が、記憶装置206から読み出した車両12の位置情報Pos_xが、領域area_1において取得したものか否かを判別し、この情報の送信する又は送信しないようにした。
【0188】
しかし、制御装置208は、自宅11aを出発してから予め設定された時間が経過するまでは、GPSモジュール201aにGPS電波を受信させないように制御することにより、送信を制御するようにしてもよい。
【0189】
上記実施形態では、DSRCの路側機100を用いた場合について説明した。しかし、これに限られるものではなく、例えば、DSRCの路側機100の代わりに、携帯電話、無線LANを用いた場合でも、上記実施形態に適用できる。
【0190】
また、上記実施形態では、車載機200が領域area_1において取得した位置情報Pos_x等を送信しないものとして説明した。しかし、ユーザによる許可・不許可の指示入力により、この位置情報Pos_x等の送信を停止したり、この送信停止を解除したりする構成(仕様)とすることもできる。
【0191】
また、上記実施形態では、移動体を車両12として説明した。しかし、これに限られるものではなく、移動体が人であり、車載機200の代わりにGPS等で位置を取得できる携帯端末等を用いても、本実施形態を適用できる。
【0192】
また、上記実施形態では、操作部204は、車両12の目的地(ただし出発地でもよいし出発地と目的地の両方でもよい)を示す指示入力をユーザから受け付けているが、制御装置208は、ユーザから受け付けた出発地又は目的地の位置を示す情報を記憶装置206にユーザ情報として記憶させ、このユーザ情報を適宜読み出して目的地あるいは出発地を設定してもよい。例えば、制御装置208は、ユーザのお気に入りの位置(典型的には自宅11aの位置)の入力を予めユーザから受け付けて記憶装置206に記憶させておいてもよい。これによって、車載機200によるナビゲーションを開始せずに移動し始めた場合にも、領域area_1において取得した位置情報等を送信しないようにすることができる。
【0193】
また、上記実施形態では、領域area_1を自宅11aを中心とする所定半径の円であるとしたが、他の手法により領域area_1を設定してもよい。例えば、出発地や目的地が存在する地域ブロック内を領域area_1としてもよい。ここで地域ブロックとは、例えば○○1丁目、などの住所名で表現される街の単位である。同じ郵便番号、あるいは、同じ市外局番が対応付けられている地域を1つのブロックとしてもよい。これらの情報を地図情報に予め記憶するようにしておき、制御装置208は、出発地又は目的地の住所(あるいは郵便番号、市外局番等)を読み出し、同じ町名(あるいは同じ郵便番号、同じ市外局番等)の地域を領域area_1に設定する。この場合、領域area_1は円ではなくさまざまな形状になる。制御装置208は、車両12の現在位置が領域area_1内(同じ町内等)であれば取得した位置情報Pos_x等を路側機100に送信しない(または、記憶装置206に記憶させない)。このようにすれば、例えば自宅11aのある街と異なる街に出ないと位置情報Pos_x等が交通情報配信サーバ300に送られることはないので、自宅11aの場所の特定が容易になってしまうような情報の漏洩を防ぐことができる。
【0194】
なお、出発地又は目的地の位置が、設定された領域11aの周縁部分であったり、街のはずれの"際"、すぐ隣が違う街であったりする場合には、出発直後に位置情報area_1の送信が開始されてしまう(到着直前まで位置情報area_1の送信を続けてしまう)ため、領域area_1を部分的に拡張することが望ましい。すなわち、上述の各実施形態を組み合わせ、例えば出発後所定時間以内は送信しない、出発後所定距離を走行するまでは送信しない、とする条件と併用すればよい。
【0195】
その他、本発明によれば、個人情報の保護あるいはカーセキュリティの観点より、任意の座標(緯度・経度)を指定して、その座標から予め定められた距離の範囲内にある座標を、路側機などの外部システムに送信しないようにする制御も可能である。例えば、自宅もしくは勤務先、又は(ユーザが指定する)特定の目的地を中心として、そこから所定の距離(例えば、100m)以内にある地点(例えば、ナビゲーション装置の電源を停止した場所、もしくは車両のエンジンを切った場所)の座標情報を路側機などに送信しないようにすることができる。これにより、毎日出発する地点である自宅や、出勤先である勤務地、又は他人に知られたくない特定の立ち寄り場所などを特定する座標情報の漏洩が有効に防止できることとなり、結果として個人情報保護やカーセキュリティにつながる。
【0196】
また、上記実施形態では、プログラムが、それぞれメモリ等に予め記憶されているものとして説明した。しかし、ナビゲーションシステムを、装置の全部又は一部として動作させ、あるいは、上述の処理を実行させるためのプログラムを、フレキシブルディスク、CD−ROM(CompactDiskRead-OnlyMemory)、DVD(DigitalVersatileDisk)、MO(MagnetoOpticaldisk)などのコンピュータ読み取り可能な記録媒体に格納して配布し、これを別のコンピュータにインストールし、上述の手段として動作させ、あるいは、上述の工程を実行させてもよい。
【0197】
さらに、インターネット上のサーバ装置が有するディスク装置等にプログラムを格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するものとしてもよい。
【符号の説明】
【0198】
11a 出発地(自宅)
11b 目的地
12 車両
13 探索対象道路
100 路側機
101 無線通信部
102 通信制御部
103 記憶装置
104 制御部
105 ROM
106 RAM
107 システムバス
200 車載機
201 通信部
202 音声処理部
203 出力部
204 操作部
205 I/O装置
206 記憶装置
207 時間計測部
208 制御装置
209 ROM
210 RAM
255 センサ群
300 交通情報配信サーバ
【特許請求の範囲】
【請求項1】
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が投入されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源投入の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より短い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする移動体位置情報送信装置。
【請求項2】
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が切断されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源切断の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より長い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする移動体位置情報送信装置。
【請求項1】
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が投入されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源投入の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より短い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする移動体位置情報送信装置。
【請求項2】
移動体の現在位置を示す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段により取得された現在位置が、ユーザによって予め設定された条件の領域に含まれるか否かを判別する判別手段と、
路側に設置された通信装置から、前記位置情報取得手段により取得された位置情報を送信する旨の要求を受け取った場合に、
前記現在位置が前記領域に含まれないと前記判別手段により判別された位置情報については前記通信装置に送信し、
前記現在位置が前記領域に含まれると前記判別手段により判別された位置情報については前記通信装置に送信しない、送信手段と、
を備えた、移動体位置情報送信装置であって、
時刻を計時する計時手段と、
前記移動体位置情報送信装置の電源が切断されたときに前記計時手段により計時された時刻を記憶する時刻記憶手段と、
を更に備え、
前記判別手段は、前記時刻記憶手段に記憶された前回の電源切断の時刻から、今回の電源投入の時刻までの経過時間を計算し、当該経過時間が所定時間以上経過しているか否かを更に判別し、
前記送信手段は、当該経過時間が当該所定時間より長い場合、前記位置情報取得手段により取得された位置情報を送信し、それ以外の場合、前記位置情報取得手段により取得された位置情報を送信しない、
ことを特徴とする移動体位置情報送信装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】

【図16】

【図17】
【図18】

【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−163569(P2012−163569A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2012−100995(P2012−100995)
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2008−549376(P2008−549376)の分割
【原出願日】平成19年12月14日(2007.12.14)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2008−549376(P2008−549376)の分割
【原出願日】平成19年12月14日(2007.12.14)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]