
電源回路及び電力変換装置
【課題】本発明はキャリア周波数が増加しても出力電圧の低下を抑える電源回路を提供することである。
【解決手段】直流電力を交流電力に変換し、かつ上アームおよび下アームを構成する複数のスイッチング素子からなるインバータ回路と、前記複数のスイッチング素子を制御する制御回路と、前記制御回路からの信号に基づき、前記複数のスイッチング素子を駆動する駆動回路と、前記駆動回路に電力を供給する絶縁型電源回路と、を有し、前記制御回路は、前記電源回路から前記駆動回路に出力する電源電圧を制御し、前記駆動回路は、キャリア周波数、および前記電源電圧に基づいて前記複数のスイッチング素子を駆動し、前記電源回路は、前記駆動回路に出力された電圧を電源制御ICに出力するフィードバック回路を有し、前記フィードバック回路は前記キャリア周波数の変化に基づいて前記電源制御ICに出力する電圧を制御するダミー回路を有する。
【解決手段】直流電力を交流電力に変換し、かつ上アームおよび下アームを構成する複数のスイッチング素子からなるインバータ回路と、前記複数のスイッチング素子を制御する制御回路と、前記制御回路からの信号に基づき、前記複数のスイッチング素子を駆動する駆動回路と、前記駆動回路に電力を供給する絶縁型電源回路と、を有し、前記制御回路は、前記電源回路から前記駆動回路に出力する電源電圧を制御し、前記駆動回路は、キャリア周波数、および前記電源電圧に基づいて前記複数のスイッチング素子を駆動し、前記電源回路は、前記駆動回路に出力された電圧を電源制御ICに出力するフィードバック回路を有し、前記フィードバック回路は前記キャリア周波数の変化に基づいて前記電源制御ICに出力する電圧を制御するダミー回路を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はハイブリッド自動車、または電気自動車の電源回路及び電力変換装置に係わるものである。
【背景技術】
【0002】
インバータを構成するスイッチング素子のスイッチング速度が速いと、スイッチング損失は小さくなるが、スイッチング素子のコレクタ−エミッタ間電圧にサージが発生しやすくなる。この場合、その電圧が定格電圧を超えるとスイッチング素子が故障してしまうという課題がある。一方スイッチング速度が遅いと、サージは発生しにくくなるが、スイッチング素子のスイッチング損失が大きくなり、エネルギー効率が悪化する。また、スイッチング速度が遅い場合、ジャンクション温度が上昇しやすくなり、その温度が定格温度を超えるとスイッチング素子が故障してしまう。
【0003】
ゲートドライブ回路においてはこれらのトレードオフを最適化した設計を行う必要があり、ゲート電圧は変動しないことが望ましく、ゲート電圧を一定に保つためには電源回路の出力電圧が変動しないようにすることが必要である。
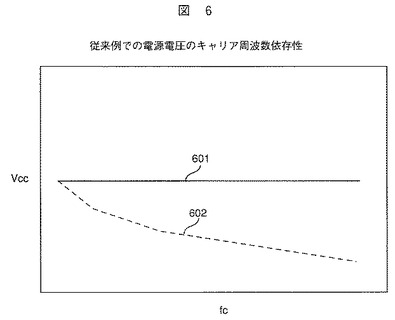
【0004】
従来の電源回路では、ゲートドライブ回路のキャリア周波数(スイッチング周波数)が高くなるとスイッチング素子のゲート容量の充放電電流が増え、ゲートで消費される電力は増加する。一方、フィードバック出力回路は、ゲートドライブ回路のようにキャリア周波数fcに対して応答しない。そのため電源回路で消費される電力が増加しても、図6に示すようにフィードバック出力回路の出力電圧601は変化せず、ゲートドライブ回路に供給される電力はキャリア周波数fcが変動しても一定となる。ゲートドライブ回路に供給される電力が一定であっても、ゲートドライブ回路で消費される電力は増加するため、図6の2次側出力回路の電源電圧Vccに示すように、電源電圧は下がってしまう。
【0005】
これによりスイッチング素子のゲート電圧は最適設計の条件から下がってしまい、スイッチング損失が増加しエネルギー効率が悪化するという問題があった。
【0006】
特許文献1に記載の電源回路においては、出力回路の負荷が低減した場合に出力回路に設けられたダミー負荷回路がオンし、負荷を増加させて出力電圧の増加を抑えた発明が開示されている。
【0007】
しかし、特許文献1に記載の電源回路においては、出力回路の負荷が低減した場合に出力回路の出力電圧が増加するという問題については対策されているが、出力回路の負荷が増加した場合に出力回路の出力電圧が低下する問題については考慮されていない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−341695号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記問題を鑑み、本発明はキャリア周波数が増加しても出力電圧の低下を抑える電力変換装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
本発明にかかる電力変換装置の特徴は、直流電力を交流電力に変換し、かつ上アームおよび下アームを構成する複数のスイッチング素子からなるインバータ回路と、前記複数のスイッチング素子を制御する制御回路と、前記制御回路からの信号に基づき、前記複数のスイッチング素子を駆動する駆動回路と、前記駆動回路に電力を供給する絶縁型電源回路と、を有し、前記制御回路は、前記電源回路から前記駆動回路に出力する電源電圧を制御し、前記駆動回路は、キャリア周波数、および前記電源電圧に基づいて前記複数のスイッチング素子を駆動し、前記電源回路は、前記駆動回路に出力された電圧を電源制御ICに出力するフィードバック回路を有し、前記フィードバック回路は、前記キャリア周波数の変化に基づいて前記電源制御ICに出力する電圧を制御するダミー回路を有することである。
【発明の効果】
【0011】
キャリア周波数が増加しても、ゲートへの出力電圧の低下を抑える電力変換装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明のバッファ回路の回路図である。
【図2】本発明の第1の実施形態に係る電源回路の回路図である。
【図3】3相モータ駆動用インバータの電気回路的構成例を示す図である。
【図4】本発明の第1の実施形態に係るダミー負荷回路の回路図である。
【図5】ゲートドライブ回路の構成例を示す回路図である。
【図6】従来例の電源回路における電源電圧のキャリア周波数依存性を示す図である。
【図7】本発明の電源回路における電源電圧のキャリア周波数依存性を示す図である。
【図8】本発明の第2の実施形態に係る電源回路の回路図である。
【図9】本発明の第2の実施形態に係るダミー負荷回路の回路図である。
【図10】本発明の第3の実施形態に係る電源回路の回路図である。
【図11】本発明の第3の実施形態に係るダミー負荷回路の回路図である。
【図12】本発明の第4の実施形態に係る電源回路の回路図である。
【図13】本発明の第4の実施形態に係るダミー負荷回路の回路図である。
【発明を実施するための形態】
【0013】
上記発明が解決しようとする課題の欄や、発明の効果の欄に記載の内容に加え、以下の実施形態では、製品化の上で望ましい課題が解決でき、また製品化の上で好ましい効果を奏する。その幾つかを次に記載すると共に実施の形態の説明でも、具体的な課題の解決や具体的な効果について説明する。
【0014】
〔実施形態1〕
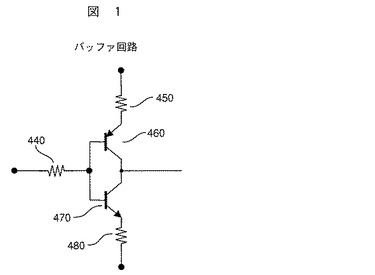
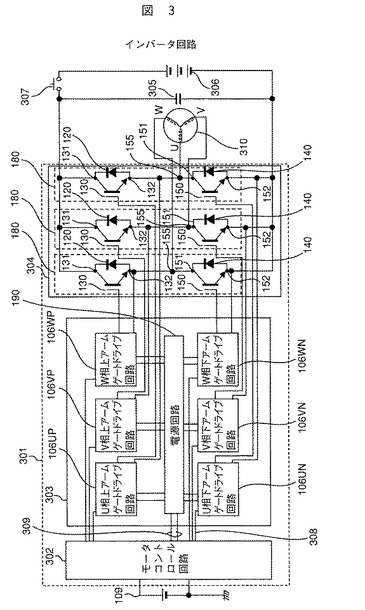
本発明による第1の実施形態を図2を使って説明する。ゲートドライブ回路用の電源回路を図2に示す。この電源回路はフライバック型回路である。電源回路は出力を絶縁するためにトランス103を有する。トランス103は、1次側コイル222が1つと2次側コイル220,221が7つある。2次側コイルの1つは電源電圧のフィードバック用のダミーコイル220であり、残りの6つがゲートドライブ回路221に電源を提供している。トランスの1次側に電源制御IC101,トランス駆動用MOSFET102がある。1次側コイルはインバータ外部のバッテリ109にモータコントロール基板を介して接続している。電源制御IC101はPWM信号をMOSFET102のゲートに出力し、トランス103の1次側電流をスイッチングする。その際、PWMのデューティ比によってトランス103の1次側電流を変え、バッテリ109から2次側に伝送する電力を変化させることができる。バッテリ109の基準電位は車両のボディであり、モータに電力を供給する前記高電圧直流電源306の基準電位とは異なっている。2次側のコイルには整流ダイオード104,コンデンサ105があり、コンデンサの端子が出力となる。出力には負荷としてそれぞれのゲートに対応したゲートドライブ回路106UP,UN,VP,VN,WP,WN(以下ゲートドライブ回路106と示す。)が接続されている。これが3相上下アーム計6回路ある。ここで、図3で示した電源回路190はバッテリ109を電源とし、基準電位は車両ボディとなるため、2次側の出力回路の基準電位とは絶縁しなければならず、その出力回路電圧を直接フィードバックすることができない。そのため、バッテリ109と基準電位を等しくする第7の2次側出力回路がフィードバック用出力回路107として別途用意される。フィードバック用出力回路107も他の2次側出力回路と同様の整流ダイオードおよびコンデンサを有している。またフィードバック用出力回路の2次側コイルも他の2次側コイルと同じ巻数となっており、トランスのコイル間の結合が十分密の場合はフィードバック出力回路107にも他の2次側回路と同じ出力電圧が現れる。フィードバック出力回路107にはその出力電圧を所定の電圧に分圧する分圧回路108がある。ここで分圧回路は電源制御IC101に出力電圧信号をフィードバックする。そして電源制御IC101は電源回路のフィードバック出力回路の出力電圧を検知し、それが所定の電圧(15V)になるようにトランス駆動用MOSFET102をスイッチングするPWM出力信号のデューティ比を調整する。フィードバック出力回路107にはダミー負荷回路201が備わっている。ダミー負荷回路201は外部入力信号端子203を有し、フィードバック出力回路の出力202とグランドとの間に接続されている。外部入力端子203はU相下アームゲート信号配線308に接続されている。ここで外部入力端子203は例としてU相下アームゲート信号配線308に接続されているが、これ以外のゲート信号配線に接続されてもよい。
【0015】
(インバータ)
ハイブリッド自動車のモータ駆動用インバータ(電力変換装置)は直流電源から供給された直流電力を回転電機などの交流電気負荷に供給するための交流電力に変換する機能、あるいは回転電機により発電された交流電力を直流電源に供給するための直流電力に変換する機能を備えている。前記変換機能を果すため、インバータはMOSFETやIGBTといったスイッチング素子を有しており、前記スイッチング素子がオン・オフを繰り返すことにより直流電力から交流電力へあるいは交流電力から直流電力への前記電力変換を行う。
【0016】
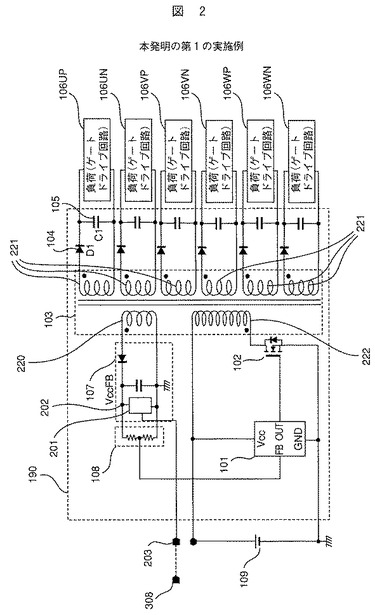
図3を用いてハイブリッド自動車のモータ駆動用インバータの電気回路的構造例を説明する。インバータ301はモータコントロール基板302,ゲートドライブ基板303,スイッチング素子を有するパワーモジュール304からなる。パワーモジュール304はIGBT130,150とダイオード120,140が電気的に並列に接続されたアームを有し、降圧直流電源の正極側に配置されているアームを上アーム、高圧直流電源の負極側に配置されているアームを下アームと呼ぶ。直列回路180は、上アームを構成するIGBTのエミッタ電極132と、下アームを構成するIGBTのコレクタ電極152が電気的に直列接続された回路であり、モータ310に電力を出力する中間出力端子155を有する。また3相モータを駆動するインバータの場合、出力が3つ必要となるので、前記スイッチング素子の上下アームの直列回路180が3つ内蔵される。またゲートドライブ基板303内部には3つの上下アームのIGBT130,150それぞれに対してゲートドライブ回路が1回路ずつあり、合計6つのゲートドライブ回路106を有している。モータコントロール基板302からゲートドライブ基板303には電源ライン309およびU相下アームゲートドライブ回路106UNへのゲート信号配線308を始めとする計6つのゲート信号配線が接続されている。
【0017】
ここで注意すべきことがある。それはモータコントロール基板302とゲートドライブ基板303内のゲートドライブ回路106の基準電位は異なっているということである。ハイブリッド自動車のモータ駆動用インバータの外部電源は一般的に2種類ある。通常の車両用12V電源とモータ駆動用の高電圧電源306である。ここで12V電源は制御回路用であり、その基準電位は車両のボディである。またモータ駆動用の高電圧電源306はIGBT130,150に与えられるものであり、その基準電位は車両ボディとは限らず、高電圧電源の正電極電位と負電極電位の中間電位が車両ボディとなるようにされている場合がある。本実施形態では、前記モータコントロール基板302には車両用12V電源が使われ、その基準電位は車両ボディとなる。一方、上アーム用のゲートドライブ回路106UP,106VP,106WPの基準電位は、各ゲートドライブ回路106UP,106VP,106WPに対応したIGBT130のエミッタ電極132すなわちインバータの中間出力端子と同電位であり、下アームのゲートドライブ回路106UN,106VN,106WNの基準電位は、各ゲートドライブ回路106UN,106VN,106WNに対応したIGBT150のエミッタ電極152、すなわち高圧直流電源306の負極側電位と同電位となっている。
【0018】
インバータの動作としては、まずモータコントロール基板302が前記IGBT130,150をスイッチングするためにゲートドライブ基板303の6つのゲートドライブ回路106にPWM方式のゲート信号を送信する。ここでモータコントロール基板302とゲートドライブ基板303とは基準電位が異なるので、信号の送受信はフォトカプラなどの絶縁信号伝送装置を介して行われる。次にゲートドライブ回路106は前記ゲート信号に基づいてIGBT130,150のゲート−エミッタ端子間に電圧を与え、IGBT130,150をスイッチングする。これによりIGBT130,150はモータ310に電流を流し、モータ310が駆動される。
【0019】
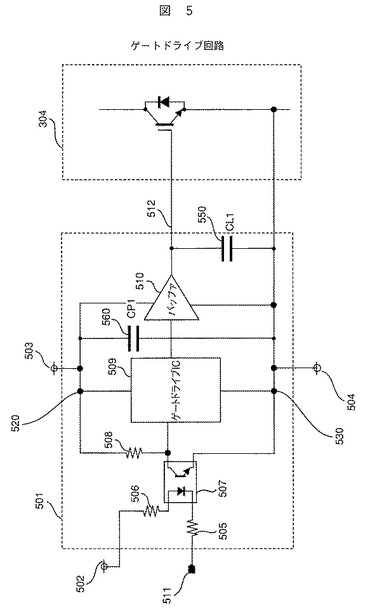
(ゲートドライブ回路)
図5に1回路分のゲートドライブ回路106の例のブロック図を示す。ゲートドライバ回路501は主にフォトカプラ507,ゲートドライブIC509,バッファ510,ゲートドライブIC509及びバッファ510と並列に接続された電源バイパスコンデンサ560、およびIGBT130,150のゲートエミッタ間と並列に接続されたコンデンサ550から構成される。
【0020】
モータコントロール基板302から前記ゲート信号がフォトカプラ507を介してゲートドライブIC509に入力される。このモータコントロール基板302から入力される前記ゲート信号は基準電位が車両ボディで、信号レベルは5Vである。これに対しゲートドライブ回路106ではそれとは基準電位が異なり、信号レベルも大電流を駆動するIGBTのゲート閾値電圧より高い15Vとなっている。つまりフォトカプラ507は絶縁信号伝送の他にも信号レベル変換の役割も担っている。この信号に基づいてゲートドライブIC509はバッファ510を介してIGBT130,150のゲート−エミッタ間電圧を与える。
【0021】
(バッファ回路)
バッファ回路510は、抵抗450,IGBT460,IGBT470及び抵抗480が図1のように直列に接続された構成になっている。なお、IGBT460及びIGBT470のゲートには、ゲート抵抗440が電気的に接続されている。
【0022】
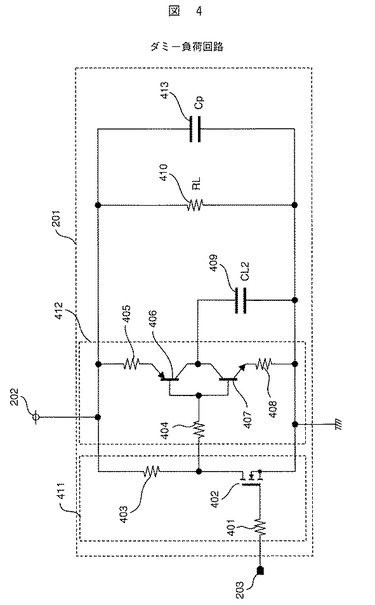
(ダミー負荷回路)
ダミー負荷回路201を、図4を使って説明する。本回路は外部入力信号バッファ411,ドライバ412,負荷容量409,負荷抵抗410から構成され、電源およびグランドはそれぞれフィードバック出力回路の出力202およびグランドに接続されている。なお、バイパスコンデンサ413はゲートドライブ回路106の電源バイパスコンデンサ560に対応するもので、ゲートドライブ回路106に存在する電源バイパスコンデンサ560と同じ容量のものを設けるのが望ましい。
【0023】
外部入力信号バッファ411はゲート信号の信号レベル5Vから15Vに変換する。外部入力信号バッファ411はMOSFET402,ゲート抵抗401,フィードバック出力回路の出力202にプルアップされた抵抗403から構成される信号反転回路になっている。モータコントロール基板302からの5Vゲート信号がゲート抵抗401を介して、MOSFET402のゲート端子に入力される。すると外部入力信号バッファ411は15Vの反転信号を次段のドライバ412に出力する。
【0024】
ドライバ412はフィードバック出力回路の出力202から電源を得て、ゲート信号の周波数で負荷容量409を充放電する。ドライバ412は入力抵抗404,高電位側出力抵抗405,PNPバイポーラトランジスタ406,NPNバイポーラトランジスタ407,低電位側出力抵抗408から構成される非反転バッファ回路となっている。
【0025】
負荷容量409はその容量CL2はゲートドライブ回路の負荷容量すなわちIGBTモジュール304のIGBT130,150のゲート容量とゲートドライブ回路106中の容量の和と同じ容量となっている。具体的な容量値の決め方としてはIGBT130,150のゲート蓄積電荷QG,ゲート電圧VGからCL2=QG/VG+C0とすればよい。ここでC0はゲートドライブ回路中の出力負荷以外の電源電圧で充放電される容量負荷の総容量である。またゲートドライブ回路106の電源電圧のキャリア周波数依存性を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にCL2を調整するとさらによい。負荷容量409の決め方としては、上述した方法以外にも図5に示すようなゲートドライブ回路106中に用いられている負荷容量550と同様の容量を用いても良い。
【0026】
負荷抵抗410はゲートドライブ回路106の直流電流負荷を模擬するもので、その抵抗値RLはゲートドライブ回路106の消費電流の直流分と同じ電流を流す抵抗値となっている。具体的には図5に示すようなゲートドライブIC509のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の抵抗値が望ましい。またキャリア0Hzの時のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の電源電圧を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にRLを調整するとさらによい。
【0027】
なお、ダミー負荷回路201の外部入力信号バッファ411およびドライバ412においては実物のゲートドライブ回路106を用いると、実際のゲートドライブ回路の周波数応答を模擬することが可能になり、よりフィードバックの精度は向上する。
【0028】
この構成により、このダミー負荷回路201はモータコントローラ基板302からのゲート信号に従いドライバ412がフィードバック出力回路の出力202から電源を得て、キャリア周波数でゲートドライブ回路106と同じ負荷容量を充放電する。負荷抵抗410はフィードバック出力回路の出力202から電源を得てゲートドライブIC509に流れる電流と同じ電流を流すので、電源回路のフィードバック出力回路において、キャリア周波数に関わらずゲートドライブ回路106と同様の負荷を再現することができる。
【0029】
上述した内容により、キャリア周波数が増加して電源回路190の出力回路の負荷が増加しても、フィードバック出力回路の負荷も実際の負荷に追従することができる。フィードバック出力回路の負荷も実際の負荷に追従する事ができることによって、図7のグラフのように、キャリア周波数fcが増加しても、2次側出力回路の電源電圧Vcc702がほぼ一定となる。従って、キャリア周波数が増加した際の出力電圧の降下、つまりスイッチング素子のゲート電圧の低下を抑えることができ、インバータの電力効率の低下を抑えることができる。
【0030】
〔実施形態2〕
(電源回路)
第2の実施形態を図8を使って説明する。この電源回路190は実施形態1で説明した電源回路の構成とほぼ同様である。第1の実施形態では、ダミー回路にも電力が供給されているため、ダミー回路内でも電力消費される。しかしダミー回路は、ゲートドライブ回路106の出力電圧の低下を防ぐことができる程度にフィードバック出力電圧を出力できれば良いので、ダミー回路での電力消費を抑えることが望ましい。そこで本実施形態では、実施形態1と異なってトランス803のフィードバック用コイル804の巻数が他の2次側コイルの巻数の1/3と少なくし、分圧回路805の分圧比を元の3倍にしている。つまり出力電圧が15Vから5Vと1/3になっている。上記構成によって、ダミー回路801に出力される電圧が小さくなるため、ダミー回路内での電力消費量が抑えられる。ダミー負荷回路801は外部入力信号端子203を有し、フィードバック出力回路の出力802とグランドとの間に接続されている。外部入力端子808はU相下アームゲート信号配線308に接続されている。ここで外部入力端子808は例としてU相下アームゲート信号配線308に接続されているが、これ以外のゲート信号配線に接続されてもよい。
【0031】
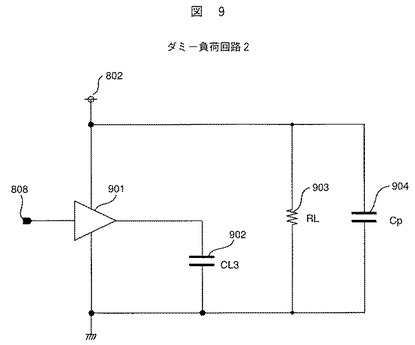
(ダミー負荷回路)
第2の実施形態におけるダミー負荷回路801を図9を使って説明する。本回路はバッファIC901,負荷容量902,負荷抵抗903から構成され、電源およびグランドはそれぞれフィードバック出力回路の出力802およびグランドに接続されている。なお、バイパスコンデンサ904はゲートドライブ回路106と並列に接続された電源バイパスコンデンサ560を模擬するもので、ゲートドライブ回路106に存在する電源バイパスコンデンサ560と同じ容量のものを設けるのが望ましい。
【0032】
バッファIC901はフィードバック出力回路の出力802から5V電源を得ているので、モータコントロール基板302からのゲート信号を信号レベル5Vのまま入力して、ゲート信号の周波数で負荷容量902を充放電することができる。
【0033】
負荷容量902は上述した実施形態1と同様の決め方をする。
【0034】
負荷抵抗903はゲートドライブ回路106の直流電流負荷を模擬するもので、その抵抗値RLはゲートドライブ回路の消費電流の直流分の1/3の電流を流す抵抗値となっている。具体的には図5に示すようなゲートドライブIC509のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の抵抗値の3倍であることが望ましい。またキャリア0Hzの時のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の電源電圧を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にRLを調整するとさらによい。
【0035】
この構成により、このダミー負荷回路802はモータコントローラ基板302からのゲート信号に従いドライバ901がフィードバック出力回路の出力802から電源を得て、キャリア周波数でゲートドライブ回路の負荷容量と同じ負荷容量をゲートドライブ回路の電源電圧の1/3の電圧で充放電する。負荷抵抗903はフィードバック出力回路の出力802から電源を得てゲートドライブIC509の消費電流の直流分の1/3の電流を流すので、出力電圧をゲートドライブ回路106の電源電圧の1/3にスケーリングされたフィードバック出力回路において、キャリア周波数に関わらずゲートドライブ回路106の1/3の負荷を再現することができる。また、ゲートドライブ回路106の出力電圧の1/3にすることによって、バッファ411が必要なくなるため、ダミー回路を小型化することが可能となる。なお、消費電力を抑えるだけの効果を得たい場合は、フィードバック用コイル804の巻数が他の2次側コイルの巻数の1/Nと少なくし、分圧回路805の分圧比を元のN倍にすればよい。
【0036】
上述した内容により、キャリア周波数が増加して電源回路190の出力回路の負荷が増加しても、フィードバック出力回路の負荷も実際の負荷に追従することができる。フィードバック出力回路の負荷も実際の負荷に追従することができることによって、図7のグラフのように、キャリア周波数fcが増加しても、2次側出力回路の電源電圧Vcc702がほぼ一定となる。従って、キャリア周波数が増加した際の出力電圧の降下、つまりスイッチング素子のゲート電圧の低下を抑えることができ、インバータの電力効率の低下を抑えることができる。さらにフィードバック出力回路の出力電圧を、モータコントロール基板302のゲート信号電圧と同じにすることにより、実施形態1に示したバッファ411が不要となり、ダミー回路801を簡素化できるので、小型化,低コスト化できる。またダミー回路801に出力される電圧が小さくなるので、ダミー回路801で消費される消費電力を低減でき、電源回路の効率を向上することができる。
【0037】
〔実施形態3〕
(電源回路)
本発明による第3の実施形態を図10を使って説明する。この電源回路は実施形態1で説明した電源回路とほぼ同様である。第1及び第2の実施形態では、一つの上又は一つの下アームに出力されるゲート信号がダミー回路に出力されている。しかし、インバータ301の制御方式が2相変調方式に変化した場合、動いていない1相の信号を用いていると、フィードバックができなくなる恐れがある。そこで本実施形態3では、フィードバック出力回路1003の出力ノード1002とグランドの間に、モータコントロール基板302に接続された3つの信号端子1004,1005,1006を有することにより、直接ダミー回路1002にゲート信号情報、例えばキャリア周波数情報に基づいた信号を出力することが可能となり、制御の信頼性が向上する。
【0038】
キャリア周波数情報に基づいた信号は、キャリア周波数fcの最高周波数fcmaxに対して、低域を代表する周波数f0=1/4×fcmax、中域を代表する周波数f1=1/2×fcmax、高域を代表するある周波数f2=3/4×fcmaxに対し、信号端子1004に入力される信号はキャリア周波数fcが周波数f0より高い場合‘H’レベル(5V)になり、f0より低い場合は‘L’レベル(0V)となる信号になっている。また信号端子1005に入力される信号はキャリア周波数fcが周波数f1より高い場合‘H’レベル(5V)になり、f1より低い場合は‘L’レベル(0V)となる信号になっている。また信号端子1006に入力される信号はキャリア周波数fcがある周波数f2より高い場合‘H’レベル(5V)になり、f2より低い場合は‘L’レベル(0V)となる信号になっている。なお、ここでは低域を代表する周波数をf0=1/4×fcmax、中域を代表する周波数をf1=1/2×fcmax、高域を代表するある周波数をf2=3/4×fcmaxとしているが、この周波数設定に限られるものではなく、使用される周波数帯域の大小に応じて周波数設定を変化させても良い。
【0039】
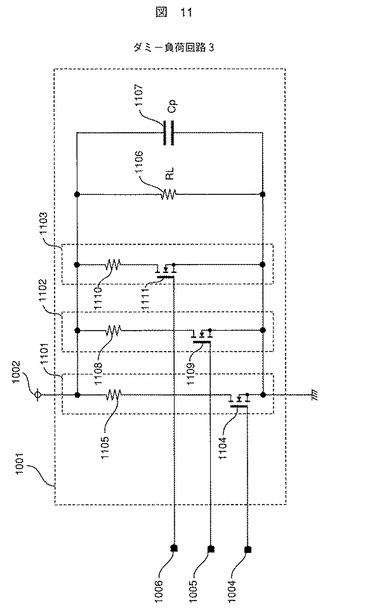
(ダミー負荷回路)
本発明の第3の実施形態におけるダミー負荷回路を図11を使って説明する。ダミー負荷回路1001はスイッチ付き直流負荷回路1101,1102,1103および負荷抵抗1106から構成されている。なお、バイパスコンデンサ1107はゲートドライブ回路106の電源バイパスコンデンサ560に対応するもので、ゲートドライブ回路106に存在する電源バイパスコンデンサ560と同じ容量のものを設けるのが望ましい。
【0040】
負荷抵抗410はゲートドライブ回路1106の直流電流負荷を模擬するもので、その抵抗値RLはゲートドライブ回路106の消費電流の直流分と同じ電流を流す抵抗値となっている。具体的には図5に示すようなゲートドライブIC509のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の抵抗値が望ましい。またキャリア0Hzの時のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の電源電圧を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にRLを調整するとさらによい。スイッチ付き直流負荷回路1101はMOSFET1104とフィードバック出力回路の出力ノード1002にプルアップされた抵抗1105から構成されている。信号端子1004が‘H’レベルになるとMOSFET1104がオンし、フィードバック出力回路の出力ノード1002からグランドに抵抗1105を介して電流が流れる。抵抗1105の抵抗値はキャリア周波数fc=f0の時のゲートドライブ回路の容量負荷電流に相当する電流が流れる抵抗値となっている。他のスイッチ付き直流負荷回路1102,1103も同じ構成となっている。なお、抵抗1105,1108,1110の抵抗値はそれぞれ同じ値である。
【0041】
ダミー負荷回路1001はキャリア周波数fcが0<fc<f0の非常に低い範囲では負荷抵抗1106のみによる電流を流す。またf0<fc<f1の低域では負荷抵抗1106に加えてスイッチ付き直流負荷回路1101がオンし、キャリア周波数fc=f0でのゲートドライブ回路の負荷電流に相当する電流を流す。そしてf1<fc<f2の中域では負荷抵抗1106、スイッチ付き直流負荷回路1101に加えてスイッチ付き直流負荷回路1102がオンし、キャリア周波数fc=f1でのゲートドライブ回路の負荷電流に相当する電流を流す。さらにf2<fc<fcmaxの高域では負荷抵抗1106、スイッチ付き直流負荷回路1101,1102,1103すべてがオンし、キャリア周波数fc=f2でのゲートドライブ回路の負荷電流に相当する電流を流す。また、本実施形態3では、実施形態1や実施形態2のように負荷容量409,902が存在しないため、ダミー回路1001をより小型化することが可能となり、電源回路の低コスト化に繋がる。さらに、ダミー回路1001に流れる負荷電流が、図4及び図9に示された負荷容量409,902による充放電ではなく、抵抗1105,1108,1110をのみ介して出力されるため、フィードバック出力回路807の出力電圧にリップルノイズが載らず安定した制御が可能になる。
【0042】
また、抵抗1105,1108,1110の抵抗値はそれぞれ同じ値としたが、それぞれ異なる値として設定されていても良い。特に、抵抗1105の抵抗値:抵抗1108の抵抗値:抵抗1110の抵抗値が1:2:4になるように設定すると8段階に電流を変化させることが可能となり、より細かい制御にも対応することがでるため、フィードバックの信頼性が向上する。
【0043】
また、上述した実際にゲートに出力されているスイッチング信号をダミー回路に出力した場合、PWM制御で用いられているデューティ比を変更するとパルス幅が細くなることがあり、細幅パルスを感知できない可能性がある。その場合、ダミー回路1001はモータコントロール基板302からデューティ比50%のスイッチング信号に基づいた情報を受けることによって、パルスを感知できなくなることがなくなり、より制御の信頼性が向上する。
【0044】
上述の内容により、ダミー負荷回路1001はモータコントローラ基板302からのキャリア周波数情報に関する信号を直接フィードバック出力回路に出力することができ、インバータ301の制御方式が2相変調方式に変化した場合であっても、キャリア周波数に応じてゲートドライブ回路106と同様の負荷を再現することができるため、フィードバック制御の信頼性を向上することができる。従って、キャリア周波数が増加して電源回路の出力回路の負荷が増加しても、フィードバック出力回路の負荷も実際の負荷に追従することができるので、キャリア周波数が増加した際の出力電圧の降下つまりスイッチング素子のゲート電圧の低下を抑えることができ、インバータの電力効率の低下を防ぐことができる。また負荷電流がスイッチングによる容量の充放電でなく直流抵抗なのでフィードバック出力回路の出力電圧にリップルノイズが載らず安定した制御が可能になる。
【0045】
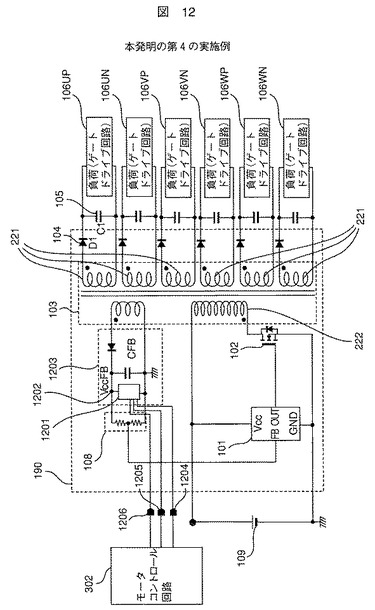
〔実施形態4〕
図12は本発明の第4の実施形態であり、基本的な構成は第3の実施形態と同様である。モータコントロール回路302はフィードバック回路1203のダミー負荷回路に対し、3相のPWM信号を送信する。例えばUNゲート駆動PWM信号1204,VNゲート駆動PWM信号1205,WNゲート駆動PWM信号1206を送信する。
【0046】
ダミー負荷回路1201は、第1の実施形態のダミー負荷回路201を3つ有し、それぞれのダミー回路201に、それぞれ3つのPWM信号を入力することを可能にしたものである。なお、それぞれのダミー回路201は、負荷抵抗410及び負荷容量413を共通のものにし、回路構成を簡素化している。さらに具体的な構成としては、信号1204に対して外部入力信号バッファ411,ドライバ412および負荷容量1304を有している。負荷容量1304は、実施形態1の図5に示した負荷容量409の1/3の容量である。同様に信号1205,1206に対しても信号レベル変換回路411,バッファ回路412および負荷容量1305もしくは1306を有している。負荷容量1305,1306は負荷容量409の1/3の容量である。
【0047】
上述の内容により、ダミー負荷回路1201はモータコントローラ基板302からのキャリア周波数情報に関する信号を直接フィードバック出力回路に出力することができ、インバータ301の制御方式が2相変調方式に変化した場合であっても、キャリア周波数に応じてゲートドライブ回路106と同様の負荷を再現することができるため、フィードバック制御の信頼性を向上することができる。また、ダミー負荷回路1201は負荷抵抗410及び負荷容量413を共通のものにしているため、ダミー回路1201の構成を簡素化でき、さらにはUVW3相の平均負荷を再現することができ、フィードバック出力回路1203の出力電圧のリップルノイズを緩和することが可能になる。
【符号の説明】
【0048】
101 電源制御IC
102 トランス駆動MOSFET
103 トランス
104 整流ダイオード
105 コンデンサ
106 ゲートドライブ回路
107 フィードバック出力回路
108 分圧回路
109 バッテリ
201 ダミー回路
203 外部入力信号端子
220,221 2次側コイル
222 1次側コイル
308 ゲート信号配線
【技術分野】
【0001】
本発明はハイブリッド自動車、または電気自動車の電源回路及び電力変換装置に係わるものである。
【背景技術】
【0002】
インバータを構成するスイッチング素子のスイッチング速度が速いと、スイッチング損失は小さくなるが、スイッチング素子のコレクタ−エミッタ間電圧にサージが発生しやすくなる。この場合、その電圧が定格電圧を超えるとスイッチング素子が故障してしまうという課題がある。一方スイッチング速度が遅いと、サージは発生しにくくなるが、スイッチング素子のスイッチング損失が大きくなり、エネルギー効率が悪化する。また、スイッチング速度が遅い場合、ジャンクション温度が上昇しやすくなり、その温度が定格温度を超えるとスイッチング素子が故障してしまう。
【0003】
ゲートドライブ回路においてはこれらのトレードオフを最適化した設計を行う必要があり、ゲート電圧は変動しないことが望ましく、ゲート電圧を一定に保つためには電源回路の出力電圧が変動しないようにすることが必要である。
【0004】
従来の電源回路では、ゲートドライブ回路のキャリア周波数(スイッチング周波数)が高くなるとスイッチング素子のゲート容量の充放電電流が増え、ゲートで消費される電力は増加する。一方、フィードバック出力回路は、ゲートドライブ回路のようにキャリア周波数fcに対して応答しない。そのため電源回路で消費される電力が増加しても、図6に示すようにフィードバック出力回路の出力電圧601は変化せず、ゲートドライブ回路に供給される電力はキャリア周波数fcが変動しても一定となる。ゲートドライブ回路に供給される電力が一定であっても、ゲートドライブ回路で消費される電力は増加するため、図6の2次側出力回路の電源電圧Vccに示すように、電源電圧は下がってしまう。
【0005】
これによりスイッチング素子のゲート電圧は最適設計の条件から下がってしまい、スイッチング損失が増加しエネルギー効率が悪化するという問題があった。
【0006】
特許文献1に記載の電源回路においては、出力回路の負荷が低減した場合に出力回路に設けられたダミー負荷回路がオンし、負荷を増加させて出力電圧の増加を抑えた発明が開示されている。
【0007】
しかし、特許文献1に記載の電源回路においては、出力回路の負荷が低減した場合に出力回路の出力電圧が増加するという問題については対策されているが、出力回路の負荷が増加した場合に出力回路の出力電圧が低下する問題については考慮されていない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−341695号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記問題を鑑み、本発明はキャリア周波数が増加しても出力電圧の低下を抑える電力変換装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
本発明にかかる電力変換装置の特徴は、直流電力を交流電力に変換し、かつ上アームおよび下アームを構成する複数のスイッチング素子からなるインバータ回路と、前記複数のスイッチング素子を制御する制御回路と、前記制御回路からの信号に基づき、前記複数のスイッチング素子を駆動する駆動回路と、前記駆動回路に電力を供給する絶縁型電源回路と、を有し、前記制御回路は、前記電源回路から前記駆動回路に出力する電源電圧を制御し、前記駆動回路は、キャリア周波数、および前記電源電圧に基づいて前記複数のスイッチング素子を駆動し、前記電源回路は、前記駆動回路に出力された電圧を電源制御ICに出力するフィードバック回路を有し、前記フィードバック回路は、前記キャリア周波数の変化に基づいて前記電源制御ICに出力する電圧を制御するダミー回路を有することである。
【発明の効果】
【0011】
キャリア周波数が増加しても、ゲートへの出力電圧の低下を抑える電力変換装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明のバッファ回路の回路図である。
【図2】本発明の第1の実施形態に係る電源回路の回路図である。
【図3】3相モータ駆動用インバータの電気回路的構成例を示す図である。
【図4】本発明の第1の実施形態に係るダミー負荷回路の回路図である。
【図5】ゲートドライブ回路の構成例を示す回路図である。
【図6】従来例の電源回路における電源電圧のキャリア周波数依存性を示す図である。
【図7】本発明の電源回路における電源電圧のキャリア周波数依存性を示す図である。
【図8】本発明の第2の実施形態に係る電源回路の回路図である。
【図9】本発明の第2の実施形態に係るダミー負荷回路の回路図である。
【図10】本発明の第3の実施形態に係る電源回路の回路図である。
【図11】本発明の第3の実施形態に係るダミー負荷回路の回路図である。
【図12】本発明の第4の実施形態に係る電源回路の回路図である。
【図13】本発明の第4の実施形態に係るダミー負荷回路の回路図である。
【発明を実施するための形態】
【0013】
上記発明が解決しようとする課題の欄や、発明の効果の欄に記載の内容に加え、以下の実施形態では、製品化の上で望ましい課題が解決でき、また製品化の上で好ましい効果を奏する。その幾つかを次に記載すると共に実施の形態の説明でも、具体的な課題の解決や具体的な効果について説明する。
【0014】
〔実施形態1〕
本発明による第1の実施形態を図2を使って説明する。ゲートドライブ回路用の電源回路を図2に示す。この電源回路はフライバック型回路である。電源回路は出力を絶縁するためにトランス103を有する。トランス103は、1次側コイル222が1つと2次側コイル220,221が7つある。2次側コイルの1つは電源電圧のフィードバック用のダミーコイル220であり、残りの6つがゲートドライブ回路221に電源を提供している。トランスの1次側に電源制御IC101,トランス駆動用MOSFET102がある。1次側コイルはインバータ外部のバッテリ109にモータコントロール基板を介して接続している。電源制御IC101はPWM信号をMOSFET102のゲートに出力し、トランス103の1次側電流をスイッチングする。その際、PWMのデューティ比によってトランス103の1次側電流を変え、バッテリ109から2次側に伝送する電力を変化させることができる。バッテリ109の基準電位は車両のボディであり、モータに電力を供給する前記高電圧直流電源306の基準電位とは異なっている。2次側のコイルには整流ダイオード104,コンデンサ105があり、コンデンサの端子が出力となる。出力には負荷としてそれぞれのゲートに対応したゲートドライブ回路106UP,UN,VP,VN,WP,WN(以下ゲートドライブ回路106と示す。)が接続されている。これが3相上下アーム計6回路ある。ここで、図3で示した電源回路190はバッテリ109を電源とし、基準電位は車両ボディとなるため、2次側の出力回路の基準電位とは絶縁しなければならず、その出力回路電圧を直接フィードバックすることができない。そのため、バッテリ109と基準電位を等しくする第7の2次側出力回路がフィードバック用出力回路107として別途用意される。フィードバック用出力回路107も他の2次側出力回路と同様の整流ダイオードおよびコンデンサを有している。またフィードバック用出力回路の2次側コイルも他の2次側コイルと同じ巻数となっており、トランスのコイル間の結合が十分密の場合はフィードバック出力回路107にも他の2次側回路と同じ出力電圧が現れる。フィードバック出力回路107にはその出力電圧を所定の電圧に分圧する分圧回路108がある。ここで分圧回路は電源制御IC101に出力電圧信号をフィードバックする。そして電源制御IC101は電源回路のフィードバック出力回路の出力電圧を検知し、それが所定の電圧(15V)になるようにトランス駆動用MOSFET102をスイッチングするPWM出力信号のデューティ比を調整する。フィードバック出力回路107にはダミー負荷回路201が備わっている。ダミー負荷回路201は外部入力信号端子203を有し、フィードバック出力回路の出力202とグランドとの間に接続されている。外部入力端子203はU相下アームゲート信号配線308に接続されている。ここで外部入力端子203は例としてU相下アームゲート信号配線308に接続されているが、これ以外のゲート信号配線に接続されてもよい。
【0015】
(インバータ)
ハイブリッド自動車のモータ駆動用インバータ(電力変換装置)は直流電源から供給された直流電力を回転電機などの交流電気負荷に供給するための交流電力に変換する機能、あるいは回転電機により発電された交流電力を直流電源に供給するための直流電力に変換する機能を備えている。前記変換機能を果すため、インバータはMOSFETやIGBTといったスイッチング素子を有しており、前記スイッチング素子がオン・オフを繰り返すことにより直流電力から交流電力へあるいは交流電力から直流電力への前記電力変換を行う。
【0016】
図3を用いてハイブリッド自動車のモータ駆動用インバータの電気回路的構造例を説明する。インバータ301はモータコントロール基板302,ゲートドライブ基板303,スイッチング素子を有するパワーモジュール304からなる。パワーモジュール304はIGBT130,150とダイオード120,140が電気的に並列に接続されたアームを有し、降圧直流電源の正極側に配置されているアームを上アーム、高圧直流電源の負極側に配置されているアームを下アームと呼ぶ。直列回路180は、上アームを構成するIGBTのエミッタ電極132と、下アームを構成するIGBTのコレクタ電極152が電気的に直列接続された回路であり、モータ310に電力を出力する中間出力端子155を有する。また3相モータを駆動するインバータの場合、出力が3つ必要となるので、前記スイッチング素子の上下アームの直列回路180が3つ内蔵される。またゲートドライブ基板303内部には3つの上下アームのIGBT130,150それぞれに対してゲートドライブ回路が1回路ずつあり、合計6つのゲートドライブ回路106を有している。モータコントロール基板302からゲートドライブ基板303には電源ライン309およびU相下アームゲートドライブ回路106UNへのゲート信号配線308を始めとする計6つのゲート信号配線が接続されている。
【0017】
ここで注意すべきことがある。それはモータコントロール基板302とゲートドライブ基板303内のゲートドライブ回路106の基準電位は異なっているということである。ハイブリッド自動車のモータ駆動用インバータの外部電源は一般的に2種類ある。通常の車両用12V電源とモータ駆動用の高電圧電源306である。ここで12V電源は制御回路用であり、その基準電位は車両のボディである。またモータ駆動用の高電圧電源306はIGBT130,150に与えられるものであり、その基準電位は車両ボディとは限らず、高電圧電源の正電極電位と負電極電位の中間電位が車両ボディとなるようにされている場合がある。本実施形態では、前記モータコントロール基板302には車両用12V電源が使われ、その基準電位は車両ボディとなる。一方、上アーム用のゲートドライブ回路106UP,106VP,106WPの基準電位は、各ゲートドライブ回路106UP,106VP,106WPに対応したIGBT130のエミッタ電極132すなわちインバータの中間出力端子と同電位であり、下アームのゲートドライブ回路106UN,106VN,106WNの基準電位は、各ゲートドライブ回路106UN,106VN,106WNに対応したIGBT150のエミッタ電極152、すなわち高圧直流電源306の負極側電位と同電位となっている。
【0018】
インバータの動作としては、まずモータコントロール基板302が前記IGBT130,150をスイッチングするためにゲートドライブ基板303の6つのゲートドライブ回路106にPWM方式のゲート信号を送信する。ここでモータコントロール基板302とゲートドライブ基板303とは基準電位が異なるので、信号の送受信はフォトカプラなどの絶縁信号伝送装置を介して行われる。次にゲートドライブ回路106は前記ゲート信号に基づいてIGBT130,150のゲート−エミッタ端子間に電圧を与え、IGBT130,150をスイッチングする。これによりIGBT130,150はモータ310に電流を流し、モータ310が駆動される。
【0019】
(ゲートドライブ回路)
図5に1回路分のゲートドライブ回路106の例のブロック図を示す。ゲートドライバ回路501は主にフォトカプラ507,ゲートドライブIC509,バッファ510,ゲートドライブIC509及びバッファ510と並列に接続された電源バイパスコンデンサ560、およびIGBT130,150のゲートエミッタ間と並列に接続されたコンデンサ550から構成される。
【0020】
モータコントロール基板302から前記ゲート信号がフォトカプラ507を介してゲートドライブIC509に入力される。このモータコントロール基板302から入力される前記ゲート信号は基準電位が車両ボディで、信号レベルは5Vである。これに対しゲートドライブ回路106ではそれとは基準電位が異なり、信号レベルも大電流を駆動するIGBTのゲート閾値電圧より高い15Vとなっている。つまりフォトカプラ507は絶縁信号伝送の他にも信号レベル変換の役割も担っている。この信号に基づいてゲートドライブIC509はバッファ510を介してIGBT130,150のゲート−エミッタ間電圧を与える。
【0021】
(バッファ回路)
バッファ回路510は、抵抗450,IGBT460,IGBT470及び抵抗480が図1のように直列に接続された構成になっている。なお、IGBT460及びIGBT470のゲートには、ゲート抵抗440が電気的に接続されている。
【0022】
(ダミー負荷回路)
ダミー負荷回路201を、図4を使って説明する。本回路は外部入力信号バッファ411,ドライバ412,負荷容量409,負荷抵抗410から構成され、電源およびグランドはそれぞれフィードバック出力回路の出力202およびグランドに接続されている。なお、バイパスコンデンサ413はゲートドライブ回路106の電源バイパスコンデンサ560に対応するもので、ゲートドライブ回路106に存在する電源バイパスコンデンサ560と同じ容量のものを設けるのが望ましい。
【0023】
外部入力信号バッファ411はゲート信号の信号レベル5Vから15Vに変換する。外部入力信号バッファ411はMOSFET402,ゲート抵抗401,フィードバック出力回路の出力202にプルアップされた抵抗403から構成される信号反転回路になっている。モータコントロール基板302からの5Vゲート信号がゲート抵抗401を介して、MOSFET402のゲート端子に入力される。すると外部入力信号バッファ411は15Vの反転信号を次段のドライバ412に出力する。
【0024】
ドライバ412はフィードバック出力回路の出力202から電源を得て、ゲート信号の周波数で負荷容量409を充放電する。ドライバ412は入力抵抗404,高電位側出力抵抗405,PNPバイポーラトランジスタ406,NPNバイポーラトランジスタ407,低電位側出力抵抗408から構成される非反転バッファ回路となっている。
【0025】
負荷容量409はその容量CL2はゲートドライブ回路の負荷容量すなわちIGBTモジュール304のIGBT130,150のゲート容量とゲートドライブ回路106中の容量の和と同じ容量となっている。具体的な容量値の決め方としてはIGBT130,150のゲート蓄積電荷QG,ゲート電圧VGからCL2=QG/VG+C0とすればよい。ここでC0はゲートドライブ回路中の出力負荷以外の電源電圧で充放電される容量負荷の総容量である。またゲートドライブ回路106の電源電圧のキャリア周波数依存性を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にCL2を調整するとさらによい。負荷容量409の決め方としては、上述した方法以外にも図5に示すようなゲートドライブ回路106中に用いられている負荷容量550と同様の容量を用いても良い。
【0026】
負荷抵抗410はゲートドライブ回路106の直流電流負荷を模擬するもので、その抵抗値RLはゲートドライブ回路106の消費電流の直流分と同じ電流を流す抵抗値となっている。具体的には図5に示すようなゲートドライブIC509のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の抵抗値が望ましい。またキャリア0Hzの時のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の電源電圧を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にRLを調整するとさらによい。
【0027】
なお、ダミー負荷回路201の外部入力信号バッファ411およびドライバ412においては実物のゲートドライブ回路106を用いると、実際のゲートドライブ回路の周波数応答を模擬することが可能になり、よりフィードバックの精度は向上する。
【0028】
この構成により、このダミー負荷回路201はモータコントローラ基板302からのゲート信号に従いドライバ412がフィードバック出力回路の出力202から電源を得て、キャリア周波数でゲートドライブ回路106と同じ負荷容量を充放電する。負荷抵抗410はフィードバック出力回路の出力202から電源を得てゲートドライブIC509に流れる電流と同じ電流を流すので、電源回路のフィードバック出力回路において、キャリア周波数に関わらずゲートドライブ回路106と同様の負荷を再現することができる。
【0029】
上述した内容により、キャリア周波数が増加して電源回路190の出力回路の負荷が増加しても、フィードバック出力回路の負荷も実際の負荷に追従することができる。フィードバック出力回路の負荷も実際の負荷に追従する事ができることによって、図7のグラフのように、キャリア周波数fcが増加しても、2次側出力回路の電源電圧Vcc702がほぼ一定となる。従って、キャリア周波数が増加した際の出力電圧の降下、つまりスイッチング素子のゲート電圧の低下を抑えることができ、インバータの電力効率の低下を抑えることができる。
【0030】
〔実施形態2〕
(電源回路)
第2の実施形態を図8を使って説明する。この電源回路190は実施形態1で説明した電源回路の構成とほぼ同様である。第1の実施形態では、ダミー回路にも電力が供給されているため、ダミー回路内でも電力消費される。しかしダミー回路は、ゲートドライブ回路106の出力電圧の低下を防ぐことができる程度にフィードバック出力電圧を出力できれば良いので、ダミー回路での電力消費を抑えることが望ましい。そこで本実施形態では、実施形態1と異なってトランス803のフィードバック用コイル804の巻数が他の2次側コイルの巻数の1/3と少なくし、分圧回路805の分圧比を元の3倍にしている。つまり出力電圧が15Vから5Vと1/3になっている。上記構成によって、ダミー回路801に出力される電圧が小さくなるため、ダミー回路内での電力消費量が抑えられる。ダミー負荷回路801は外部入力信号端子203を有し、フィードバック出力回路の出力802とグランドとの間に接続されている。外部入力端子808はU相下アームゲート信号配線308に接続されている。ここで外部入力端子808は例としてU相下アームゲート信号配線308に接続されているが、これ以外のゲート信号配線に接続されてもよい。
【0031】
(ダミー負荷回路)
第2の実施形態におけるダミー負荷回路801を図9を使って説明する。本回路はバッファIC901,負荷容量902,負荷抵抗903から構成され、電源およびグランドはそれぞれフィードバック出力回路の出力802およびグランドに接続されている。なお、バイパスコンデンサ904はゲートドライブ回路106と並列に接続された電源バイパスコンデンサ560を模擬するもので、ゲートドライブ回路106に存在する電源バイパスコンデンサ560と同じ容量のものを設けるのが望ましい。
【0032】
バッファIC901はフィードバック出力回路の出力802から5V電源を得ているので、モータコントロール基板302からのゲート信号を信号レベル5Vのまま入力して、ゲート信号の周波数で負荷容量902を充放電することができる。
【0033】
負荷容量902は上述した実施形態1と同様の決め方をする。
【0034】
負荷抵抗903はゲートドライブ回路106の直流電流負荷を模擬するもので、その抵抗値RLはゲートドライブ回路の消費電流の直流分の1/3の電流を流す抵抗値となっている。具体的には図5に示すようなゲートドライブIC509のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の抵抗値の3倍であることが望ましい。またキャリア0Hzの時のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の電源電圧を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にRLを調整するとさらによい。
【0035】
この構成により、このダミー負荷回路802はモータコントローラ基板302からのゲート信号に従いドライバ901がフィードバック出力回路の出力802から電源を得て、キャリア周波数でゲートドライブ回路の負荷容量と同じ負荷容量をゲートドライブ回路の電源電圧の1/3の電圧で充放電する。負荷抵抗903はフィードバック出力回路の出力802から電源を得てゲートドライブIC509の消費電流の直流分の1/3の電流を流すので、出力電圧をゲートドライブ回路106の電源電圧の1/3にスケーリングされたフィードバック出力回路において、キャリア周波数に関わらずゲートドライブ回路106の1/3の負荷を再現することができる。また、ゲートドライブ回路106の出力電圧の1/3にすることによって、バッファ411が必要なくなるため、ダミー回路を小型化することが可能となる。なお、消費電力を抑えるだけの効果を得たい場合は、フィードバック用コイル804の巻数が他の2次側コイルの巻数の1/Nと少なくし、分圧回路805の分圧比を元のN倍にすればよい。
【0036】
上述した内容により、キャリア周波数が増加して電源回路190の出力回路の負荷が増加しても、フィードバック出力回路の負荷も実際の負荷に追従することができる。フィードバック出力回路の負荷も実際の負荷に追従することができることによって、図7のグラフのように、キャリア周波数fcが増加しても、2次側出力回路の電源電圧Vcc702がほぼ一定となる。従って、キャリア周波数が増加した際の出力電圧の降下、つまりスイッチング素子のゲート電圧の低下を抑えることができ、インバータの電力効率の低下を抑えることができる。さらにフィードバック出力回路の出力電圧を、モータコントロール基板302のゲート信号電圧と同じにすることにより、実施形態1に示したバッファ411が不要となり、ダミー回路801を簡素化できるので、小型化,低コスト化できる。またダミー回路801に出力される電圧が小さくなるので、ダミー回路801で消費される消費電力を低減でき、電源回路の効率を向上することができる。
【0037】
〔実施形態3〕
(電源回路)
本発明による第3の実施形態を図10を使って説明する。この電源回路は実施形態1で説明した電源回路とほぼ同様である。第1及び第2の実施形態では、一つの上又は一つの下アームに出力されるゲート信号がダミー回路に出力されている。しかし、インバータ301の制御方式が2相変調方式に変化した場合、動いていない1相の信号を用いていると、フィードバックができなくなる恐れがある。そこで本実施形態3では、フィードバック出力回路1003の出力ノード1002とグランドの間に、モータコントロール基板302に接続された3つの信号端子1004,1005,1006を有することにより、直接ダミー回路1002にゲート信号情報、例えばキャリア周波数情報に基づいた信号を出力することが可能となり、制御の信頼性が向上する。
【0038】
キャリア周波数情報に基づいた信号は、キャリア周波数fcの最高周波数fcmaxに対して、低域を代表する周波数f0=1/4×fcmax、中域を代表する周波数f1=1/2×fcmax、高域を代表するある周波数f2=3/4×fcmaxに対し、信号端子1004に入力される信号はキャリア周波数fcが周波数f0より高い場合‘H’レベル(5V)になり、f0より低い場合は‘L’レベル(0V)となる信号になっている。また信号端子1005に入力される信号はキャリア周波数fcが周波数f1より高い場合‘H’レベル(5V)になり、f1より低い場合は‘L’レベル(0V)となる信号になっている。また信号端子1006に入力される信号はキャリア周波数fcがある周波数f2より高い場合‘H’レベル(5V)になり、f2より低い場合は‘L’レベル(0V)となる信号になっている。なお、ここでは低域を代表する周波数をf0=1/4×fcmax、中域を代表する周波数をf1=1/2×fcmax、高域を代表するある周波数をf2=3/4×fcmaxとしているが、この周波数設定に限られるものではなく、使用される周波数帯域の大小に応じて周波数設定を変化させても良い。
【0039】
(ダミー負荷回路)
本発明の第3の実施形態におけるダミー負荷回路を図11を使って説明する。ダミー負荷回路1001はスイッチ付き直流負荷回路1101,1102,1103および負荷抵抗1106から構成されている。なお、バイパスコンデンサ1107はゲートドライブ回路106の電源バイパスコンデンサ560に対応するもので、ゲートドライブ回路106に存在する電源バイパスコンデンサ560と同じ容量のものを設けるのが望ましい。
【0040】
負荷抵抗410はゲートドライブ回路1106の直流電流負荷を模擬するもので、その抵抗値RLはゲートドライブ回路106の消費電流の直流分と同じ電流を流す抵抗値となっている。具体的には図5に示すようなゲートドライブIC509のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の抵抗値が望ましい。またキャリア0Hzの時のゲートドライブIC正極接続点520とゲートドライブIC負極接続点530の間の電源電圧を実測し、フィードバック出力回路の出力電圧が電源電圧のキャリア周波数依存性と一致するように実験的にRLを調整するとさらによい。スイッチ付き直流負荷回路1101はMOSFET1104とフィードバック出力回路の出力ノード1002にプルアップされた抵抗1105から構成されている。信号端子1004が‘H’レベルになるとMOSFET1104がオンし、フィードバック出力回路の出力ノード1002からグランドに抵抗1105を介して電流が流れる。抵抗1105の抵抗値はキャリア周波数fc=f0の時のゲートドライブ回路の容量負荷電流に相当する電流が流れる抵抗値となっている。他のスイッチ付き直流負荷回路1102,1103も同じ構成となっている。なお、抵抗1105,1108,1110の抵抗値はそれぞれ同じ値である。
【0041】
ダミー負荷回路1001はキャリア周波数fcが0<fc<f0の非常に低い範囲では負荷抵抗1106のみによる電流を流す。またf0<fc<f1の低域では負荷抵抗1106に加えてスイッチ付き直流負荷回路1101がオンし、キャリア周波数fc=f0でのゲートドライブ回路の負荷電流に相当する電流を流す。そしてf1<fc<f2の中域では負荷抵抗1106、スイッチ付き直流負荷回路1101に加えてスイッチ付き直流負荷回路1102がオンし、キャリア周波数fc=f1でのゲートドライブ回路の負荷電流に相当する電流を流す。さらにf2<fc<fcmaxの高域では負荷抵抗1106、スイッチ付き直流負荷回路1101,1102,1103すべてがオンし、キャリア周波数fc=f2でのゲートドライブ回路の負荷電流に相当する電流を流す。また、本実施形態3では、実施形態1や実施形態2のように負荷容量409,902が存在しないため、ダミー回路1001をより小型化することが可能となり、電源回路の低コスト化に繋がる。さらに、ダミー回路1001に流れる負荷電流が、図4及び図9に示された負荷容量409,902による充放電ではなく、抵抗1105,1108,1110をのみ介して出力されるため、フィードバック出力回路807の出力電圧にリップルノイズが載らず安定した制御が可能になる。
【0042】
また、抵抗1105,1108,1110の抵抗値はそれぞれ同じ値としたが、それぞれ異なる値として設定されていても良い。特に、抵抗1105の抵抗値:抵抗1108の抵抗値:抵抗1110の抵抗値が1:2:4になるように設定すると8段階に電流を変化させることが可能となり、より細かい制御にも対応することがでるため、フィードバックの信頼性が向上する。
【0043】
また、上述した実際にゲートに出力されているスイッチング信号をダミー回路に出力した場合、PWM制御で用いられているデューティ比を変更するとパルス幅が細くなることがあり、細幅パルスを感知できない可能性がある。その場合、ダミー回路1001はモータコントロール基板302からデューティ比50%のスイッチング信号に基づいた情報を受けることによって、パルスを感知できなくなることがなくなり、より制御の信頼性が向上する。
【0044】
上述の内容により、ダミー負荷回路1001はモータコントローラ基板302からのキャリア周波数情報に関する信号を直接フィードバック出力回路に出力することができ、インバータ301の制御方式が2相変調方式に変化した場合であっても、キャリア周波数に応じてゲートドライブ回路106と同様の負荷を再現することができるため、フィードバック制御の信頼性を向上することができる。従って、キャリア周波数が増加して電源回路の出力回路の負荷が増加しても、フィードバック出力回路の負荷も実際の負荷に追従することができるので、キャリア周波数が増加した際の出力電圧の降下つまりスイッチング素子のゲート電圧の低下を抑えることができ、インバータの電力効率の低下を防ぐことができる。また負荷電流がスイッチングによる容量の充放電でなく直流抵抗なのでフィードバック出力回路の出力電圧にリップルノイズが載らず安定した制御が可能になる。
【0045】
〔実施形態4〕
図12は本発明の第4の実施形態であり、基本的な構成は第3の実施形態と同様である。モータコントロール回路302はフィードバック回路1203のダミー負荷回路に対し、3相のPWM信号を送信する。例えばUNゲート駆動PWM信号1204,VNゲート駆動PWM信号1205,WNゲート駆動PWM信号1206を送信する。
【0046】
ダミー負荷回路1201は、第1の実施形態のダミー負荷回路201を3つ有し、それぞれのダミー回路201に、それぞれ3つのPWM信号を入力することを可能にしたものである。なお、それぞれのダミー回路201は、負荷抵抗410及び負荷容量413を共通のものにし、回路構成を簡素化している。さらに具体的な構成としては、信号1204に対して外部入力信号バッファ411,ドライバ412および負荷容量1304を有している。負荷容量1304は、実施形態1の図5に示した負荷容量409の1/3の容量である。同様に信号1205,1206に対しても信号レベル変換回路411,バッファ回路412および負荷容量1305もしくは1306を有している。負荷容量1305,1306は負荷容量409の1/3の容量である。
【0047】
上述の内容により、ダミー負荷回路1201はモータコントローラ基板302からのキャリア周波数情報に関する信号を直接フィードバック出力回路に出力することができ、インバータ301の制御方式が2相変調方式に変化した場合であっても、キャリア周波数に応じてゲートドライブ回路106と同様の負荷を再現することができるため、フィードバック制御の信頼性を向上することができる。また、ダミー負荷回路1201は負荷抵抗410及び負荷容量413を共通のものにしているため、ダミー回路1201の構成を簡素化でき、さらにはUVW3相の平均負荷を再現することができ、フィードバック出力回路1203の出力電圧のリップルノイズを緩和することが可能になる。
【符号の説明】
【0048】
101 電源制御IC
102 トランス駆動MOSFET
103 トランス
104 整流ダイオード
105 コンデンサ
106 ゲートドライブ回路
107 フィードバック出力回路
108 分圧回路
109 バッテリ
201 ダミー回路
203 外部入力信号端子
220,221 2次側コイル
222 1次側コイル
308 ゲート信号配線
【特許請求の範囲】
【請求項1】
直流電力を交流電力に変換し、かつ上アームおよび下アームを構成する複数のスイッチング素子からなるインバータ回路と、
前記複数のスイッチング素子を制御する制御回路と、
前記制御回路からの信号に基づき、前記複数のスイッチング素子を駆動する駆動回路と、
前記駆動回路に電力を供給する電源回路と、を有し、
前記制御回路は、前記電源回路から前記駆動回路に出力する電源電圧を制御し、
前記駆動回路は、キャリア周波数、および前記電源電圧に基づいて前記複数のスイッチング素子を駆動し、
前記電源回路は、バッテリから電圧が供給される1次側コイルと、当該1次側コイルを介して電圧を供給する複数個の2次側コイルを備えたトランスと、フィードバック回路を有し、
前記複数個の2次側コイルのうち、第一の2次側コイルは、前記駆動回路に電圧を出力し、
前記複数個の2次側コイルのうち、第二の2次側コイルは、前記フィードバック回路に電圧を出力し、
前記フィードバック回路は、前記キャリア周波数の変化に基づいて前記1次側コイルに出力する電圧を制御するダミー回路を有することを特徴とする電力変換装置。
【請求項2】
請求項1に記載の電力変換装置であって、
前記インバータ回路は、前記上アームと前記下アームとを直列に接続した直列回路であるU相,V相およびW相回路を有し、
前記駆動回路は前記U相,V相,W相回路を構成する前記上アームおよび前記下アームのそれぞれに対応した複数のゲートドライブ回路から構成され、
前記ダミー回路は、第一のスイッチ手段と、第二のスイッチ手段と、コンデンサと、抵抗を有し、
前記第一のスイッチ手段と第二のスイッチ手段は、直列に接続された直列回路を構成し、かつ当該第一のスイッチ手段は当該第二のスイッチ手段よりも高電位側に配置され、
前記コンデンサは、前記第二のスイッチ手段と並列に接続され、
前記抵抗は、前記直列回路と並列に接続されることを特徴とする電力変換装置。
【請求項3】
請求項2に記載の電力変換装置であって、
前記コンデンサの静電容量は、前記インバータ回路を構成する1つのスイッチング素子のゲート−エミッタ間に並列に接続されたコンデンサの静電容量と略同一であることを特徴とする電力変換装置。
【請求項4】
請求項2または3のいずれかに記載の電力変換装置であって、
前記抵抗の抵抗値は、前記ゲートドライブ回路が有するゲートICの正極接続点、およびゲートICの負極接続点の間の抵抗値であることを特徴とする電力変換装置。
【請求項5】
請求項1または2に記載の電力変換装置であって、
前記第二の2次側コイルの巻き線数は、前記1次側コイルの巻き線数よりも少ないことを特徴とする電力変換装置。
【請求項6】
請求項1または2に記載の電力変換装置であって、
前記1次側コイルと第二の2次側コイルの巻き線数の比は、前記バッテリの電圧と前記スイッチング素子を駆動する電圧の比と同一比であることを特徴とする電力変換装置。
【請求項7】
請求項1に記載の電力変換装置であって、
前記ダミー回路は、抵抗とスイッチング素子が直列に接続された複数のスイッチング回路と、第一の抵抗を有し、
前記第一の抵抗は、前記スイッチング回路と並列に接続され、
前記制御回路は、前記キャリア周波数の変動に応じて導通させるスイッチング回路の数を変動させることを特徴とする電力変換装置。
【請求項8】
請求項7に記載の電力変換装置であって、
前記複数のスイッチング回路は、第一のスイッチング回路,第二のスイッチング回路,および第三のスイッチング回路から構成され、
前記制御回路は、前記キャリア周波数が第一の所定値以上の場合に前記第一のスイッチング回路を導通させ、前記キャリア周波数が第二の所定値以上の場合に前記第一のスイッチング回路、および前記第二のスイッチング回路を導通させ、前記キャリア周波数が第三の所定値以上の場合に前記第一のスイッチング回路,前記第二のスイッチング回路、および前記第三のスイッチング回路を導通させ、
前記第一の所定値は前記第二の所定値よりも小さく、前記第二の所定値は前記第三の所定値よりも小さいことを特徴とする電力変換装置。
【請求項9】
請求項2に記載の電力変換装置であって、
前記フィードバック回路は、前記U相回路,前記V相回路、および前記W相回路のそれぞれに対応した複数の前記ダミー回路を有することを特徴とする電力変換装置。
【請求項10】
請求項9に記載の電力変換装置であって、
前記キャリア周波数の情報は、前記制御回路から出力されることを特徴とする電力変換装置。
【請求項1】
直流電力を交流電力に変換し、かつ上アームおよび下アームを構成する複数のスイッチング素子からなるインバータ回路と、
前記複数のスイッチング素子を制御する制御回路と、
前記制御回路からの信号に基づき、前記複数のスイッチング素子を駆動する駆動回路と、
前記駆動回路に電力を供給する電源回路と、を有し、
前記制御回路は、前記電源回路から前記駆動回路に出力する電源電圧を制御し、
前記駆動回路は、キャリア周波数、および前記電源電圧に基づいて前記複数のスイッチング素子を駆動し、
前記電源回路は、バッテリから電圧が供給される1次側コイルと、当該1次側コイルを介して電圧を供給する複数個の2次側コイルを備えたトランスと、フィードバック回路を有し、
前記複数個の2次側コイルのうち、第一の2次側コイルは、前記駆動回路に電圧を出力し、
前記複数個の2次側コイルのうち、第二の2次側コイルは、前記フィードバック回路に電圧を出力し、
前記フィードバック回路は、前記キャリア周波数の変化に基づいて前記1次側コイルに出力する電圧を制御するダミー回路を有することを特徴とする電力変換装置。
【請求項2】
請求項1に記載の電力変換装置であって、
前記インバータ回路は、前記上アームと前記下アームとを直列に接続した直列回路であるU相,V相およびW相回路を有し、
前記駆動回路は前記U相,V相,W相回路を構成する前記上アームおよび前記下アームのそれぞれに対応した複数のゲートドライブ回路から構成され、
前記ダミー回路は、第一のスイッチ手段と、第二のスイッチ手段と、コンデンサと、抵抗を有し、
前記第一のスイッチ手段と第二のスイッチ手段は、直列に接続された直列回路を構成し、かつ当該第一のスイッチ手段は当該第二のスイッチ手段よりも高電位側に配置され、
前記コンデンサは、前記第二のスイッチ手段と並列に接続され、
前記抵抗は、前記直列回路と並列に接続されることを特徴とする電力変換装置。
【請求項3】
請求項2に記載の電力変換装置であって、
前記コンデンサの静電容量は、前記インバータ回路を構成する1つのスイッチング素子のゲート−エミッタ間に並列に接続されたコンデンサの静電容量と略同一であることを特徴とする電力変換装置。
【請求項4】
請求項2または3のいずれかに記載の電力変換装置であって、
前記抵抗の抵抗値は、前記ゲートドライブ回路が有するゲートICの正極接続点、およびゲートICの負極接続点の間の抵抗値であることを特徴とする電力変換装置。
【請求項5】
請求項1または2に記載の電力変換装置であって、
前記第二の2次側コイルの巻き線数は、前記1次側コイルの巻き線数よりも少ないことを特徴とする電力変換装置。
【請求項6】
請求項1または2に記載の電力変換装置であって、
前記1次側コイルと第二の2次側コイルの巻き線数の比は、前記バッテリの電圧と前記スイッチング素子を駆動する電圧の比と同一比であることを特徴とする電力変換装置。
【請求項7】
請求項1に記載の電力変換装置であって、
前記ダミー回路は、抵抗とスイッチング素子が直列に接続された複数のスイッチング回路と、第一の抵抗を有し、
前記第一の抵抗は、前記スイッチング回路と並列に接続され、
前記制御回路は、前記キャリア周波数の変動に応じて導通させるスイッチング回路の数を変動させることを特徴とする電力変換装置。
【請求項8】
請求項7に記載の電力変換装置であって、
前記複数のスイッチング回路は、第一のスイッチング回路,第二のスイッチング回路,および第三のスイッチング回路から構成され、
前記制御回路は、前記キャリア周波数が第一の所定値以上の場合に前記第一のスイッチング回路を導通させ、前記キャリア周波数が第二の所定値以上の場合に前記第一のスイッチング回路、および前記第二のスイッチング回路を導通させ、前記キャリア周波数が第三の所定値以上の場合に前記第一のスイッチング回路,前記第二のスイッチング回路、および前記第三のスイッチング回路を導通させ、
前記第一の所定値は前記第二の所定値よりも小さく、前記第二の所定値は前記第三の所定値よりも小さいことを特徴とする電力変換装置。
【請求項9】
請求項2に記載の電力変換装置であって、
前記フィードバック回路は、前記U相回路,前記V相回路、および前記W相回路のそれぞれに対応した複数の前記ダミー回路を有することを特徴とする電力変換装置。
【請求項10】
請求項9に記載の電力変換装置であって、
前記キャリア周波数の情報は、前記制御回路から出力されることを特徴とする電力変換装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】

【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−55026(P2012−55026A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−193073(P2010−193073)
【出願日】平成22年8月31日(2010.8.31)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年8月31日(2010.8.31)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]