
Fターム[2C150ED42]の内容
Fターム[2C150ED42]の下位に属するFターム
変更可能 (17)
学習機能を有する (32)
指令と記憶又は設定値とを比較 (63)
記憶又は記録手段 (182)
Fターム[2C150ED42]に分類される特許
41 - 60 / 149
無人一輪車。
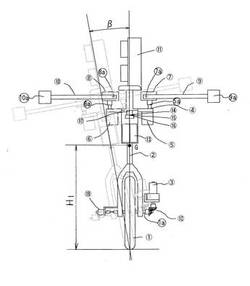
【課題】 一輪車を無人で転倒させることなく走行させる。
【解決手段】 フレームに車輪を懸架して無人で走行する無人一輪車において、フレームに車輪を駆動する走行用モータを取り付けるとともに、フレームから左腕と右腕を張出させ、フレームにこれら左腕と右腕をそれぞれ水平軸回りの回動と鉛直軸回りの回動をさせる上下用モータと旋回用モータを取り付け、フレームの重心変移で発生する前後方向及び左右方向の転倒モーメントに基づくフレームの転倒を、走行用モータによる車輪の前後移動に基づく前後方向引戻しモーメントと、上下用モータによる左腕又は/及び右腕の水平軸回りの回動に基づく左右方向引戻しモーメントと、旋回用モータによる左腕又は/及び右腕の鉛直軸回りの回動に基づく左右方向引戻しモーメント及び回行時の遠心力に基づく旋回モーメントとを発生させて防ぐ。
(もっと読む)
対話式の玩具
線路配置と、線路に沿って進むように構成された複数の車両と、線路に着脱可能に結合された複数の目的地とを含む対話式の玩具トレインシステム。車両は、互いに通信するように構成され、車両は、目的地の1つ又は複数と通信するように更に構成される。システムは、ネットワークプロトコルを有する赤外線玩具ネットワークを含み、どれが存在しどれが存在しないかを判定し、それによって複数の車両及び目的地が知的に干渉なく会話できるようにする。 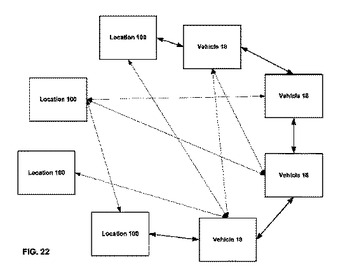 (もっと読む)
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における通信方法

【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、トレーナ信号受信機やトレーナケーブルを使用することなく、先生用と生徒用のラジオコントロール送信機との間での無線通信によってトレーナ信号が送受信できるようにする。
【解決手段】操縦信号の送信に2.4GHz帯での周波数ホッピング方式を採用する。そのうえで、トレーナモード時には、先生用ラジオコントロール送信機は、周波数が切り換えられるフレーム期間ごとに、操縦信号の送信とトレーナ信号の受信を実行する。生徒用ラジオコントロール送信機も、周波数が切り換えられるフレーム期間ごとに、トレーナ信号の送信を実行する。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における操縦信号の送信方法
【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、先生用ラジオコントロール送信機と生徒用ラジオコントロール送信機とでのチャンネルオーダーの相違による不具合をユーザの負担にならないようにして解消する。
【解決手段】先生用ラジオコントロール送信機のチャンネルに、同じコントロール対象が割り当てられている生徒用ラジオコントロール送信機1Bのチャンネルを対応付ける操作を行ってチャンネル対応データを作成し、これを先生用ラジオコントロール送信機に保持させる。先生用ラジオコントロール送信機は受信したトレーナ信号のチャンネルを、チャンネル対応データに従って変換して操縦信号を生成、送信する。
(もっと読む)
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具は、ユーザから入力された音声に応えて、話し、歌い、動き、踊る能力を有する。予めプログラムされたパラメータと、各種センサからのリアルタイム入力との組合せに基づいて玩具の動きおよびそれに伴う音を制御およびカスタマイズするために、各種モータ、アクチュエータ、マイクロフォン、スピーカ、および集積回路手段が用いられる。玩具は、高度なインタラクティブ性、ならびにユーモア、自発性、および予測不可能性をユーザに提供する。 (もっと読む)
三足歩行ロボット
【課題】 歩行ロボットには多数の関節があり、その関節を駆動するアクチュエータ、制御回路、制御ソフトウェアの製作・整備に多大な負担がかかり、しかし歩行ロボットの運用場面においては不要な機能も存在し、これが無用な重量増加も生み出し、歩行ロボットの運用を困難なものにしていた。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
(もっと読む)
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
コミュニケーションロボット
【課題】コミュニケーション対象との親密度に応じて多様なコミュニケーション行動を実行することができるコミュニケーションロボットを提供する。
【解決手段】コミュニケーションロボットは、一連の行動プログラムからなる行動モジュールを実行することによってコミュニケーション行動を取るものであり、対象となるユーザとの親密度を記憶したユーザ親密度記憶手段と、ユーザとの対話距離、ユーザとの接触状況、ユーザの顔の表情、ユーザの視線の位置などユーザの現在の反応をセンシングしたセンシング情報に基づいてセンシング親密度を算出するセンシング親密度算出手段と、ユーザ親密度とセンシング親密度とに基づいてコミュニケーション親密度を算出するコミュニケーション親密度算出手段と、コミュニケーション親密度に対応付けた行動を実行するときの行動モジュール実行情報が記憶されている行動モジュール実行情報記憶手段を有する。
(もっと読む)
音源定位ロボット
指向性の高いトカゲの耳をモデリングする生態模倣ロボットを提供する。指向性は極めてロバストであり、神経処理は非常に簡単である。したがって移動式の本音源定位ロボットは容易に小型化することができる。本発明は2つの小型マイクロフォンからの音の入力を用いて、トカゲの耳の聴覚を模倣する単一な電気回路に基づく。回路はロバストな指向性をおよそ2−4kHzで生じる。回路の出力はモデル神経システムに供給される。神経系モデルは両側性であり、帯域通過フィルタのセットを含んで、両耳からの入力を比較するシミュレーションされたEIニューロンを有する。本モデルはデジタル信号プロセッサ上のソフトウェアで実装され、ロボットの左右のステアリングモーターを制御する。さらに、神経系モデルは、装置を自動校正するために自己適応できる神経ネットワークを含む。 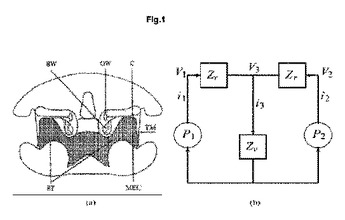 (もっと読む)
(もっと読む)
教育及び遊戯の機能を持つ多機能セラピー装置
【課題】需要者の所有欲を鼓吹させ、興味誘発による教育成果の向上と情緒涵養、及び心身安定による精神治療などに積極的に対応することができるようにした、教育及び遊戯の機能を持つ多機能セラピー装置を提供する。
【解決手段】映像と音を出力するプログラムエンジンと、駆動用電源を供給する電源供給部を内蔵した胴体とを含む装置に使用するために、前記胴体の一側に着脱可能に装着される資料格納部;前記胴体の他側に全方向への角度調節可能に装着される映像表示部;及び前記映像表示部と資料格納部との間に装着される音出力部を含んでなる。
(もっと読む)
鉄道模型の自動運転装置並びに鉄道模型の2列車自動運転方法及び2列車追突防止自動運転方法。
【課題】
列車の動力車に特別の細工をしないで二列車の定速の自動運転や2列車を同方向へ走行させた場合に自動追突防止可能な運転方法を提案する。
【解決手段】
Nゲージのような鉄道模型の動力車と全線路を複数のセクションに分割して夫々絶縁処理した線路とを使用し、動力車の走行・停止にかかわらず線路のどのセクションにあるかを検出して速度情報を検出する等の処理をマイコン部と制御情報をマイコン部に転送するパソコン部とで構成した装置で、自動運転をしたり、自動停止をしたり、2列車同方向への運転時に追突を防止して様々な高度の自動運転を可能にした。
(もっと読む)
車両玩具用走行制御装置
【課題】交差部においての車両玩具の走行を実際に近い形で実現可能な車両玩具用走行制御装置を提供すること。
【解決手段】交差部を構成する一方の軌道に、第1のストッパと第2のストッパとを配設し、第1のストッパに車両玩具が係止されているとき、第2のストッパを作動させて後続する車両玩具を係止し、1台ずつ交差部に車両玩具を進入させるとともに、他方の軌道において交差部に車両玩具が接近するときには、他方の軌道における車両玩具をして優先的に交差部に進入させるようにした。
(もっと読む)
クッキング玩具入力システム
【課題】総合的に料理全体を、料理の手順に合わせて子供が楽しみながら学ぶことができる仮想調理を行うことが可能な音声又は画像処理システムを提供する。
【解決手段】仮想調理を行うための遊戯に使用される音声又は画像処理システムであり、異なった形態の仮想調理を各々行う複数の入力装置11、12、13及び14と、各々の入力装置11、12、13及び14から入力されたデータに基づいて、各入力装置11、12、13及び14に対応する音声又は画像処理を行い、その結果を出力再生装置4に出力する音声又は画像処理装置3と、を備えた。
(もっと読む)
ラジオ・コントロール送信機
【課題】被操縦物を変更する場合に、容易に設定変更することができるラジオ・コントロール送信機を提供する。
【解決手段】ラジコン送信機1には、スティックレバー2やスイッチレバー8の操作内容と被操縦物の動作内容との関係を示す設定が予め複数記憶されている。ユーザがダイレクトボタン51、ダイレクトボタン52、またはダイレクトボタン53のいずれかを押しながら電源スイッチ3をオンする操作を行うと、各ダイレクトボタンに対応付けられている設定が読み出される。その結果、ユーザは、電源オンと同時に設定を切り替えることができ、すぐに操縦を行うことができる。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成した。
(もっと読む)
移動玩具、プログラム、情報記憶媒体、およびゲーム装置。
【課題】移動玩具のデータ用センサでコースデータ等のデータを適正に読み取る。
【解決手段】コース60上を移動する移動玩具10であって、ボディ12と、ボディに搭載され、所与の動力が供給されて移動玩具を移動させる原動機30と、移動玩具がデータを読み取るためにコースに設けられる複数のデータマーカDM1〜DMnを検知するデータ用センサ50aと、データをサンプリングするためのクロックを読み取るためにコースに設けられる複数のクロックマーカCM1〜CM16を検知するクロック用センサ50bと、クロック用センサの検知信号から抽出されたクロックにより、データ用センサの検知信号をサンプリングすることでデータを抽出する制御部310と、を含む。
(もっと読む)
ロボットおよび音声認識装置ならびにプログラム
【課題】音声認識の精度を向上させること。
【解決手段】音声をデジタル化して音声データを出力するマイクロフォン14と、マイクロフォン14から出力された音声データと辞書に登録された単語とを照合することで音声を認識する音声認識装置50とを備え、音声認識装置50は、複数の音声認識エンジンを有する第1処理部61を備え、一の音声認識処理部は、他の音声認識処理部とは異なるタイミングで、かつ、他の音声認識処理部の音声認識期間内に、音声認識を開始するロボットを提供する。
(もっと読む)
コミュニケーションロボット
【課題】豊かな感情表現を行うことが可能なコミュニケーションロボットを提供する。
【解決手段】本発明のコミュニケーションロボット100は、顔の画像を表示するフレキシブルパネル3と、フレキシブルパネル3の背面に設置された複数のエアーパッド4と、複数のエアーパッド4にエアーを供給し、フレキシブルパネル3の表面に、前記顔の表情に応じた凹凸形状を付与するエアー供給ユニットと、を有することを特徴とする。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 表現の豊富化を可能にするとともに、遷移する際の姿勢や動作が最適化されたロボット装置及び動作制御方法を提供する。
【解決手段】 ロボット装置1は、コントローラ32により、現在の姿勢から目標とされる姿勢又は目標とされる動作までの経路を、行動指令情報S16に基づいて、姿勢及び動作が登録されて構成され、姿勢とこの姿勢を遷移させる動作とを結んで構成されたグラフ上において探索し、探索結果に基づいて動作させて、現在の姿勢から目標とされる姿勢又は目標とされる動作に遷移させることにより、ロボット装置1やコンピュータグラフィックスで動くキャラクターの表現の豊富化が可能になる。
(もっと読む)
ゲーム装置
【課題】 音声対話システムをゲーム機に組み込んだ場合、ゲーム機が大きくなり、持ち運びに不便で、しかも、落下させた際、水没させた際に、損傷が大きい。
【解決手段】 音声対話システムを構成するマイク17、スピーカ21、音声認識ボード55、対話処理部71のうち、マイク17、スピーカ21が被対話体(ゲーム機11または可動ユニット15A)に備えられ、音声認識ボード55、対話処理部71がサーバ13に備えられるようにし、被対話体とサーバ13との間を有線または無線で接続した。
(もっと読む)
41 - 60 / 149
[ Back to top ]