
Fターム[2C150ED42]の内容
Fターム[2C150ED42]の下位に属するFターム
変更可能 (17)
学習機能を有する (32)
指令と記憶又は設定値とを比較 (63)
記憶又は記録手段 (182)
Fターム[2C150ED42]に分類される特許
101 - 120 / 149
生活リズム人形
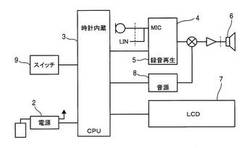
【課題】患者が受け入れることのできる、生活リズムを保つ指示を行う、生活リズム人形の提供。
【解決手段】人形の中に、電源2と、時計を内蔵したコンピュータ3と、音声録音用のマイクロフォン4と、録音再生装置5およびスピーカー6とを内蔵させ、両方の手のひらに操作スイッチ9を設け、人形の会話によって1日の生活のリズムが指示されることにより患者はそれを受け入れることができるようにした生活リズム人形。
(もっと読む)
移動体遠隔操作システム及び移動体遠隔操作プログラム

【課題】容易且つ円滑に操作することができ、操作性の向上を図る。
【解決手段】本発明は、操作体1により移動体2の動作を遠隔操作する移動体遠隔操作システムであって、移動体2の移動方向を入力する入力部11と、移動体2の方位を検出する移動体方位検出部17と、移動体2を移動させる駆動部21と、操作体1の方位を検出する操作体方位検出部9とを備え、操作体方位検出部9により検出された操作体1の方位に関する情報と入力部11により入力された移動体2の移動方向に関する情報とにより移動体2の移動目標方位を算出し、該移動目標方位に関する情報と移動体方位検出部17が検出した移動体2の方位に関する情報とにより方位誤差を算出し、該方位誤差から駆動部21の動作量を算出することを特徴とする。
(もっと読む)
ロボットおもちゃ
【課題】PCなど電子機器が備える、給電と信号送信双方が行えるコネクタを利用して、外部電源を用いることなく、煩雑な制御無しに動作するロボットおもちゃを提供する。
【解決手段】ロボット部に形状記憶合金を用いたアクチュエータを用い、電子機器から給電された電力を、共に送信される制御信号を利用して通電制御を行い、形状記憶合金に流れる電流を制御し、その動作を簡便に制御した。
(もっと読む)
脚車輪型移動ロボット、その動作方法及びプログラム
【課題】ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供する。
【解決手段】本体1と、本体1に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚3、5と、複数の脚3、5のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪9と、車輪9の回転を制動するブレーキと、を有する脚車輪型移動ロボット10において、駆動モータを制御し本体1の姿勢を変化させる時に、複数の脚3、5の少なくともいずれかのブレーキを非作動にし、車輪9が回転移動可能となった該脚から、本体1の姿勢変化によってロボット内部に蓄積される応力を外部に解放する。
(もっと読む)
コミュニケーションロボットおよびそれを用いた注意制御システム
【構成】 注意制御システム10はコミュニケ−ショロボット12を含む。コミュニケ−ショロボット12は、床センサ16の出力に基づいてコンピュータ14で検出された座標信号を受信して、周囲に存在する人間の人数を検出し、その人数に応じて、集団注意制御処理または個人注意制御処理を実行する。たとえば、集団注意制御では、全体を見渡しながら、全員に話し掛けるように行動する。一方、個人注意制御では、制御対象の人間を見て、個別に話し掛けるように行動する。
【効果】 適切な注意制御を実行することができる。
(もっと読む)
ロボットシステム
【課題】取り扱いが容易でかつ一般社会で十分に活用されるロボットを備えた安価なロボットシステムを提供することである。
【解決手段】携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
(もっと読む)
動作表出装置
【課題】人間とのより自然な対話を実現するロボットを実現する
【解決手段】耳等の特徴的な構成部品を少なくとも含む特徴部と胴体部と頭部とを備え、音声入力手段と制御部とを有するロボットを開示する。制御部は、音声入力手段を介して入力される音声を認識して該音声の指示に対応する動作を制御し、上記特徴部屈曲させる関節及び、胴体部と頭部とを接続する関節とを制御することで感情を表現する。
(もっと読む)
ペットロボット
【課題】
自律動作可能な愛玩・擬似飼育用ペットロボットを、ペットロボットの元来有する機能を活用しつつ最低限の新たな機能付加によって、遠隔地からの独居老人等擬似飼育者に対する安否確認・およびその結果の通報を簡易に且つ正確に行えるようにする。
【解決手段】
ペットロボット側からペットロボット擬似飼育者に対して何らかの動作要求を行い、前記動作要求に対して擬似飼育者が予め定められている応答動作を正しく行うか否かをペットロボット側で検知して擬似飼育者の安否判定を行い、判定結果を付加内蔵した通信機能によって予め定められている通報先に通報する。
(もっと読む)
揺動体の揺れ制御装置
【課題】コスト低減を図れ、しかも煩雑な手間を要することなく所望の揺れを実現できる揺動体の揺れ制御装置を提供する。
【解決手段】センサ部14は、揺動体に配置され、揺動体の揺れ方向の略半分の所定範囲にわたって反射伝達パターン部1411が形成された反射板141と、反射板141で反射された光を受けて受光レベルに応じたパルス信号S142を出力するひとつの光センサ142と、を有し、制御回路15は、光センサによるパルス信号波形に基づいて、波形が発生しない継続時間と変化点のカウントを行い、1周期分のパルスをカウントして揺れ振幅を認識し、波形が発生しない時間が所定時間続いたらオフタイムであると認識し1周期終了と判断し、次のパルスから駆動を開始し、揺れ停止時において、設定される揺れ振幅の度合いに応じて徐々に揺れ振幅を下げてから停止させるフェードアウト制御を行う。
(もっと読む)
アドオン装置へのインターフェイスに関する方法及びシステム
子供の玩具として実施化されることが可能である方法及びシステム10が記載される。当該システム10は、システム10によってホストされる相互作用的な環境へアドオン装置20a又はストーリをインターフェイスするように動作可能である。システム10は、システム10へ導入されたアドオン装置から通知225を受信するように動作可能である応答エンジン30を有する。応答エンジンは、アドオン装置20aへのチャレンジ235を生成するように動作可能であり、前記チャレンジは、埋め込まれた透かしを含む。応答エンジン30は、アドオン装置20aからチャレンジ235に応答して送信された対応する応答を受信するように動作可能である。更に、応答エンジン30は、アドオン装置20aが前記対応する応答を生成する際にチャレンジ235から正確に透かしを抽出することが可能であるか否かを決定するために、前記対応する応答を分析するように更に動作可能である。当該システム10は、これにより、システム10へ新しい装置20aを受け入れることが選択的に可能であり、これにより、システム10を用いて使用される偽造品又は複製品を防ぐことが可能である。 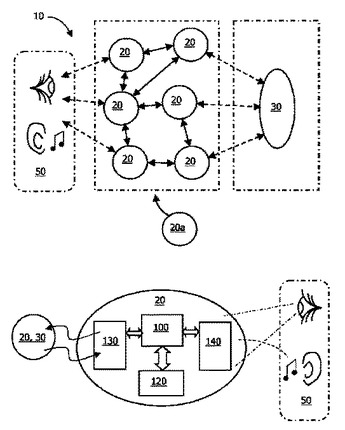 (もっと読む)
(もっと読む)
動作プログラムの入力が簡単なダンス人形
【課題】曲のイメージにあったダンスを簡単にプログラムすることができるダンス人形。
【解決手段】前記課題を解決するため、本発明に係るダンス人形は、以下の要件を備えることを特徴とする。
イ)駆動用モーター1個に対応する1個の入力スイッチを持ち、押すごとに駆動モーターを「A押して正転→B離して停止→C押して逆転→D離して停止」を繰り返す制御回路を持つこと。ロ)上記AからDまでの入力動作サイクルを予め設定された複数回数nを行い、その複数回数nの入力動作サイクルすべてのAからD個々の測定時間を時系列に記憶させる制御回路を持つこと。ハ)上記入力動作が終了後にその記憶させた動作パターンにおいて駆動モーターを繰り返して駆動させる制御回路を持つこと。
(もっと読む)
展開図生成システム、展開図生成方法及びその方法を実行させるためのプログラムが記録されたコンピューターで読み取り可能な記録媒体。
本発明は、3次元モデルの展開図を自動で生成するシステムと方法、及びその方法を実行させるためのコンピュータで読み取り可能なプログラムを提供する。 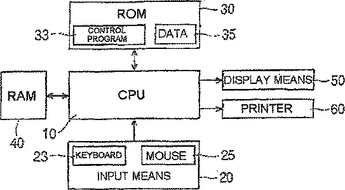 (もっと読む)
(もっと読む)
人型ロボットおよび着脱可能型臀部
【課題】 稼働環境や用途に適した臀部を備えた実用性の高い人型ロボットを提供することを目的とする。
【解決手段】 人型ロボット101の下部胴体104の背面に稼働環境や用途に応じて、着脱可能型臀部301を適宜装着する。例えば、椅子に座るのに適した構造を有する着脱可能型臀部301を用意し、これを人型ロボット101の下部胴体104の背面に装着する。こうすることで、重機等の運転席500において、人型ロボット101を椅子501に座らせ、手足を使った運転操作を行わせることができる。また、人型ロボット101に通常の椅子504に安定して座ることができる機能を与えることができる。この発明によれば、着座する機能に優れた実用性の高い人型ロボットを得ることができる。
(もっと読む)
ロボット装置及びその表情制御方法
【課題】
本発明は、簡易な構成で、ユーザとの間で適切なインタラクションを行い得るロボット装置及びその制御方法を実現するものである。
【解決手段】
表情生成部106が、ユーザ発話やロボット装置自身の発話に応じて表情表出を制御することにより、あたかもロボットが発話に応じた感情を抱いているかのような自然な印象をユーザに対して与えることができる。
(もっと読む)
ロボット装置及びその制御方法
【課題】
本発明は、簡易な構成で感情表出を行い得るロボット装置及びその制御方法を実現するものである。
【解決手段】
上下2分割の瞼を有する瞼開閉部80を、撮像機能を有する眼球部72の前方に設けるとともに、当該眼球部72の後方に設けた瞼回転部90によって瞼開閉部80を回転駆動するようにしたことにより、瞼の開閉量及び傾斜角を自在に変化させて様々な表情を表出することができるとともに、表情表出機構全体を簡易化及び小型化することができる。
(もっと読む)
音声発生玩具
【課題】音声発生玩具に於いて、容易に携帯可能で、場所を問わずに音声を発出し得る音声発生玩具を提供する。
【解決手段】感圧スイッチ13を備えた複数の無線タグユニット12a〜12jを任意の位置に配し、使用者が感圧スイッチ13を押圧することによって、該無線タグユニット12a〜12jを特定する為の個別情報を受信部16に無線送信する。受信部16は該個別情報に基づいて受信部側記憶部17に格納された音声データを発出する。
(もっと読む)
ロボット装置
【課題】 生物を模倣したロボット装置を提供する。
【解決手段】 生物の感情を模倣したロボット装置であって、不快感の強さを示す変数を保持する不快値保持部33と、不快感を増加させる増加信号の入力を受け付ける増加信号受付部31と、不快感を減少させる減少信号の入力を受け付ける減少信号受付部32と、増加信号の入力に応じて変数の値を増加させ、変数の値が下限値ではない場合に減少信号の入力に応じて変数の値を減少させる更新部34と、変数の値の減少に基づいて、快感の強さを示す値を算出する算出部35とを備える。
(もっと読む)
カード識別装置及びカード識別装置を使用したカード識別玩具。
【課題】安価で且つ、正確で高速にカード識別を行うことにできるカード識別装置及びカード識別装置を使用したカード識別玩具を提供することを課題とする。
【解決手段】前記載置部に隣接する位置で前記景品落下空間の一部を塞ぐように設けられた移動可能な移動部と、所定の条件を満たしたときに前記移動部を移動させる制御手段を設けて構成した。
(もっと読む)
リハビリ教育用患者模擬ロボット並びにリハビリ教育方法
【課題】実際の生身の患者に類似した応答を示し、リハビリの訓練・教育に適したリハビリ教育用患者模擬ロボットを提供することを目的とする。
【解決手段】コンピュータに予め症例に応じたリハビリの標準施術モードを入力しておき、回動可能な2部材接合により構成される関節が所定のトレーニングにより受ける荷重の変化を測定し、上記標準施術モードと比較して評価するようにした。これにより、リハビリのトレーニングを反復して行なえると共に、高度のリハビリ技術を短期間で習得できるものである。
(もっと読む)
走行模型体
【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車(101)と、台車車(101)に固定された固定部材(42、43および30)と、固定部材(42、43および30)に揺動可能に取り付けられた胴体部(201)と、固定部材(42、43および30)に揺動可能に取り付けられると共に胴体部(201)と連係された首部(204)と、固定部材(42、43および30)に第1連結部材(80)を用いて揺動可能に連結されると共に首部(204)に揺動可能に取り付けられた頭部(205)とを有する。
(もっと読む)
101 - 120 / 149
[ Back to top ]