
Fターム[2D054GA65]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出物理量 (334) | 長さ、高さ、距離、深さ (101)
Fターム[2D054GA65]に分類される特許
1 - 20 / 101
孔路位置計測方法及び装置
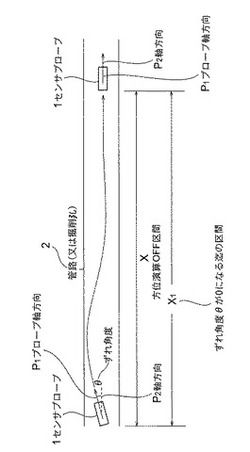
【課題】本発明は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止することを目的とする。
【解決手段】本発明による孔路位置計測方法及び装置は、センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わないようにした方法と装置である。
(もっと読む)
生分解性レジンコンクリートから成る仮設資材を用いた既設廃棄管の撤去工法及び装置

【課題】既設廃棄管が有害物質を拡散させたりすることなく、安全な作業が行えると共に、工事終了後、設置前の自然の地盤状態に復元することができる既設廃棄管の撤去工法を提供する。
【解決手段】既設廃棄管を破砕することなく撤去するか、あるいは既設廃棄管内にあらかじめエアモルタルを充填し、該廃棄管を周辺土砂と共に掘削し、掘進機に装備されたフード管内にて該廃棄管を破砕し、破砕廃棄管、充填モルタルおよび掘削土砂を周辺地盤と隔離した状態で排出しながら撤去すると共に、撤去空間内に仮設資材としての掘削外径とほぼ同径の生分解性レジンを使用した生分解性レジンコンクリート管9を敷設し、敷設した仮設資材である生分解性レジンコンクリート管9の内部に、生分解を促す砂質充填材11を圧送充填することにより、生分解が進行してレジンコンクリート管の固結強度が劣化しても、一定の支持力を保持しながら閉塞状態を持続できる。
(もっと読む)
泥水式シールド掘進機
【課題】カッターチャンバーやエアチャンバー内の圧力の変動に伴うエアチャンバー内の泥水層の水位の低下や上昇を、時間遅れを生じることなく即座に検知できるようにする。
【解決手段】カッターチャンバー12に充填された泥水21の圧力によって切羽面20を安定させながらトンネルの掘進を行う、カッターチャンバー12の後方にエアチャンバー14を備える泥水式シールド掘進機において、本体側隔壁17の上部には、当該本体側隔壁17からカッター側隔壁側16に張り出して、液面計設置室40が、その底面部40aに形成された計測開口41を泥水層19の液面の直上部分に配置して設けられており、液面計設置室40には、計測開口41との間の中空計測路42を密閉可能に開閉するバルブ機構43を介在させて、泥水層19の液面19aからの反射波を検出して泥水層19の水位を計測する液面計44が、着脱可能に取り付けられている。
(もっと読む)
相対位置を地中で確認可能なシールドマシン、及び、シールドマシンの相対位置検出方法
【課題】相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシンにおいて、スケール部材の破損を防止しつつも、超音波センサを用いた構成に比べて相対位置の検出精度を高める。
【解決手段】前側スキンプレート19Fにおけるカッター14よりも後方の位置に隔壁20が設けられたシールドマシン1Bであって、隔壁20には、相手方のシールドマシンからシールドマシンの掘進方向に繰り出された小径ボーリング部を内側空間に受け入れ可能な筒状体27が設けられ、この筒状体27には、小径ボーリング部の内側空間における底面方向の位置を計測するためのセンサ板21が設けられている。
(もっと読む)
シールド掘進機
【課題】簡易な構造で精度よくコピーカッタの突出量を制御する。
【解決手段】地盤を掘削するカッタヘッドの径方向外方に出没可能に設けられ、カッタヘッドの回転中心に向けて延びるロッド18を備えたコピーカッタと、コピーカッタを出没させる油圧シリンダと、カッタヘッドの回転中心を含む領域およびコピーカッタの先端がカッタヘッドの外周面と一致した原点位置となったときのロッド18が視認可能に設けられたファイバスコープ23と、ファイバスコープ23の視野内に設けられ、ロッド18の後端部18aと一致したときにコピーカッタが原点位置となる原点指標部20とを有し、ロッド18の後端部18aを原点指標部20に一致させてコピーカッタの原点位置を調整した後にコピーカッタを突出させる。
(もっと読む)
削孔装置及びこれを用いた注入管の敷設方法
【課題】土質に左右されることなく計画線形に沿って正確に削孔できるようにする。
【解決手段】削孔装置1は、ロッドに連結されるアウターピース3と、アウターピース内に押し出し可能に収容されるインナーピース5と、ゾンデ・ロケータ方式による位置検知に用いられる位置情報発信装置7を有する。位置情報発信装置は、該発信装置の削孔途中での取外しと再装着を可能にする着脱機構9を装備し、内部にゾンデや傾斜計を格納している。削孔途中でパーカッションを使用する場合には、着脱機構のラッチ93を解除して位置情報発信装置だけを一時的に回収する。これにより、位置情報発信装置を衝撃から確実に保護できる状態で、削孔装置の先端に打撃力を与えることができる。パーカッションが終了したら、位置情報発信装置を元の位置に押し戻しアウターピースに再装着する。これによりゾンデ・ロケータ方式による正確な位置検知を再開できる。
(もっと読む)
トンネル施工情報投影システム
【課題】トンネル施工時、切り羽面に表示する情報量を増大させることができ、トンネル施工の支援に大きく資することが可能なトンネル施工情報投影システムを提供する。
【解決手段】本発明のトンネル施工情報投影システムは、トンネル施工時、切り羽面に対し施工に関連する情報を投影することで、トンネル施工の支援を行うトンネル施工情報投影システムにおいて、前記切り羽面に投影するデータを記憶するパーソナルコンピューター20と、前記パーソナルコンピューター20と接続され、前記パーソナルコンピューター20からの入力に基づいて前記切り羽面に投影を行うプロジェクター10と、規定の基準点を前記切り羽面に照射するトータルステーション30と、からなり、前記パーソナルコンピューター20は、前記トータルステーション30によって照射された前記切り羽面上の前記基準点に基づいて前記データを補正し、投影用の補正データを生成し、前記補正データを前記プロジェクター10に入力することを特徴とする。
(もっと読む)
シールド掘進機における推進ジャッキの推力設定方法
【課題】同時掘進組立工法において、作動中の推進ジャッキにより必要な総推力及び曲げモーメントを得てシールド掘進機の掘進方向制御を行う。
【解決手段】セグメント組立箇所に対応する推進ジャッキ群(J9〜J12)を不作動とする一方、残りの推進ジャッキを作動させる場合には、J9〜J12の中央位置を軸線角度θ2で表し、J1〜J16を、軸線角度θ2に対応する軸線AX2の両側に二分される2つのグループA2,B2に分け、各グループについて、軸線AX2の方向に傾斜する勾配を有する第1の推力分布LA2,LB2を設定する。この推力分布の勾配率は軸線方向強さr2により決定される。この推力分布に従い、各推進ジャッキの推力分担率Qi’を算出し、偏差係数αA,αBを用いて変更して推力分担率Qiを算出する。推力分担率Qiと目標総推力とに基づいて各推進ジャッキの第1の推力目標値TQiを設定する。
(もっと読む)
推進力上昇位置の検出方法
【課題】長距離・曲線推進施工において、推進管列の推進力の上昇位置を的確に判断し、安全で確実に長距離・曲線推進施工が行える推進力上昇位置の検出方法を提供する。
【解決手段】推進工法で移動する管体内の見通し可能な範囲をつなぐ位置に配置した複数の自動追尾する光波測距儀で、互いの位置を自動計測してそのデ−タを演算することで先導体位置の座標を算定する自動測量システムを用いた推進力上昇位置の検出方法であって、管内に複数の前記光波測距儀を所定の間隔で配置した自動測量システムを用い、元押ジャッキ力を管列2の後端に作用させる前の各光波測距儀の位置座標と、元押ジャッキ力を管列後端に作用させて先端先導体1が移動したときの各光波測距儀の位置座標との各移動距離を算出し、その移動距離の大小差によって推進力の上昇位置を判断する推進力上昇位置の検出方法である。
(もっと読む)
小口径推進工法
【課題】掘進時に周辺地山との摩擦を防止し、構築した管渠と周辺地山との隙間を無くした小口径推進工法を提案する。
【解決手段】予め、管渠の構築予定路に沿ってロッド4を挿通しておき、このロッド4に掘進機5を接続し、ロッド4を引き込むことによって掘進機5が拡径しながら進行する。地中を進行する掘進機5に後続して、前端を外側に折り返して反転させた可撓性のチューブ体6を配設し、前記チューブ体6の内側に流体を送給して、反転させたチューブ体6を外側に押し広げ、掘進機5の進行に伴ってチューブ体6を繰り出すことにより折り返し部分6bを前進させた後、前記チューブ体5を硬化させて管渠を構築する。
(もっと読む)
テールクリアランス測定装置
【課題】測定効率の向上を図れると共に、作業員の負担の軽減を図る上で有利なテールクリアランス測定装置を提供する。
【解決手段】テールクリアランス測定装置30は、カメラ部32と、コンピュータ34とを含んで構成されている。カメラ部32は、テール部14の内周面1402および該内周面1402に対向するセグメント20の外周面2002を撮影して画像データを生成するものである。カメラ部32は、テール部14の内周面1402およびセグメント20の外周面2002の周方向に90度の間隔をおいた4個所を撮影するように4個設けられている。コンピュータ34は、ケーブルを介してカメラ部32から供給される画像データに基づいてテール部14のスキンプレート14Aの内周面1402とセグメント20の外壁面2002とのテールクリアランスを導出する。
(もっと読む)
泥土圧シールド掘進機の回転カッター
【課題】巨礫が多く散在する地山であっても、通常一般の砂礫層等を掘削するのと遜色なく掘進作業を遂行することが可能で、短工期・省力化と相俟って、施工の低コスト化を実現することができる泥土圧シールド掘進機の回転カッターを提供する。
【解決手段】ハブ部12と、ハブ部から放射状に延びる複数のスポーク部16と、これらスポーク部の先端部同士を連結する外周リング18とを有する泥土圧シールド掘進機の回転カッター2において、スポーク部の間からカッターチャンバー内へ取り込まれる礫の大きさを規制するために、当該スポーク部の中途部同士を連結する中間リング17及び中間リングに制限用突起19を設けると共に、切羽に散在している礫を割って破砕するためにスポーク部に切羽に面して、ローラーカッター15やフェースビット14を設けかつ外周リングに外周ビット31を設けた。
(もっと読む)
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機
【課題】既設トンネル内に設定された基準線に対する地山掘削機の中心軸のずれ量を測定して、地山掘削機の位置を検出可能な位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
(もっと読む)
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機
【課題】既設トンネルと地山掘削機との位置関係にかかわらず、かつ、既設トンネルに発信器を取り付けることなく、既設トンネルとの距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
(もっと読む)
方向制御削孔方法及び装置
【課題】計測誤差・削孔誤差が生じる可能性が小さく、しかも方向を制御しながら削孔するに好適な方向制御削孔方法とする。
【解決手段】削孔管5を有し、削孔管先端部50Fに角速度検出手段AD及び傾斜角検出手段BDを設けてなる削孔装置を用いて、削孔管5を推進させつつ、角速度検出手段ADにより角速度を検出し、積分することにより方位角変化量を求め、他方で、傾斜角検出手段BDにより削孔区間の先端における傾斜角を検出し、方位角変化量と傾斜角とを用いて、削孔区間の基端に対する先端の相対位置を求め、この作業を所定回繰り返して削孔管5を地中に段階的に進行させた段階で、削孔管5内に挿入式計測装置40を挿入し、削孔管先端部50Fまで移動させて孔先端部の現在位置を計測し、この計測値に基づいて相対位置を合算して得た孔先端部の現在位置を補正し、この補正値を基準として更に削孔管5を地中に段階的に進行させる。
(もっと読む)
シールド機
【課題】テールプレートのひずみ及びテールエンドクリアランスを測定可能なシールド機及びクリアランス測定方法を提供する。
【解決手段】油圧ジャッキ17の押圧部13にはクリアランス計15が設置される。クリアランス計15は、スキンプレート3内周面とセグメント9の外周面の隙間であるテールクリアランス25を測定する。テールプレート11にはひずみ計21とストローク計23が設置される。ひずみ計21は、テールプレート11のひずみを測定するためのものであり、テールプレート11のスキンプレート3側と、テールプレート11後端部に2箇所設置される。ストローク計23は、テールプレート11後端の内周面とセグメント9外周面の隙間であるテールエンドクリアランス27を測定する為のもので、テールプレート11の後端部内面に設置される。
(もっと読む)
自動測量方法
【課題】掘進機の位置及び向きの自動測量に関し、掘進機の位置及び向きを、測量することができる自動測量方法を提供する。
【解決手段】下記の手順により掘進機の位置及び向きを自動測量する。(1)自動追尾式測距測角儀の前回測量時の位置データ及びそれ以降の移動データから、自動追尾式測距測角儀の今回測量時の位置及び向きを予測し、坑口側に設置した複数の基準点の視準角を予測する工程。(2)(1)の予測結果をもとに、自動追尾式測距測角儀から、坑口側の複数の基準点を視準して自動追尾式測距測角儀の位置を検出する工程。(3)掘進機の測量位置データから、掘進機に設置した複数のターゲットの位置及び視準角を予測する工程。(4)(3)の予測結果をもとに、自動追尾式測距測角儀から掘進機に設置した複数のターゲットの位置を検出する工程。(5)掘進機の複数のターゲットの位置の検出結果をもとに、掘進機の位置と向きを求める工程。
(もっと読む)
路面変状管理システム
【課題】人為操作によるオートレベルで測量する場合に、携帯電話を入力端末とし、計測者が携帯電話を操作して入力処理を完了できて便利であり、システム構成としても経済的で簡易なものとし得、携帯電話からのデータ送出によりリアルタイム処理に適合し得る路面変状管理システムを提供する。
【解決手段】計測者が携帯し、計測範囲データから路面9の測点リスト(xxx1等)の一覧表を生成すると共に、測点リストの各測点における測量値の入力を受け付けて計測結果データを生成する測量用アプリケーションを搭載した携帯電話8を備え、ホストパソコン6と携帯電話8とを無線通信で接続し、ホストパソコンは計測範囲データを携帯電話に送出し、携帯電話の測量用アプリケーションは、携帯電話の画面に測点リストの一覧表を表示し、一覧表への測量値の入力を受け付け、入力完了指示を受け付けることで、計測結果データをホストパソコンへ送出する。
(もっと読む)
場所打ちライニング工法に用いる掘進機
【課題】覆工コンクリートの打設時にコンクリート供給量や掘進速度の変化によって生じる打設圧力の変動を抑制することにより、覆工コンクリートの健全性を確保し、周辺地盤への悪影響を防止することができる場所打ちライニング工法に用いる掘進機を提供する。
【解決手段】シールド掘進機の筒状のスキンプレートの内部に、圧力制御用の短尺ジャッキ23と妻型枠移動用の長尺ジャッキ21とを軸方向に直列に連結した複数の妻型枠ジャッキ11が並列に設置される。環状の妻型枠は、長尺ジャッキ21に連結され、長尺ジャッキ21の伸縮により移動可能とする。短尺ジャッキ23は、妻型枠ジャッキ11の移動量を調整する調整部41と、妻型枠ジャッキ11の圧力を制御する制御部39とに分割され、ロッド47に設けられた2つのピストン43、ピストン45が、それぞれ制御部39、調整部41に配置される。
(もっと読む)
コンクリートのトレーサビリティ管理方法及び管理装置
【課題】生成されたコンクリートの生成時間や性状を含む情報をトンネル外において一元的に管理するとともに、生成されたコンクリートとシールド掘進機によって打設されたコンクリートの位置情報とを対応付け、コンクリートの使用履歴を過去に遡って容易に確認可能なトレーサビリティ管理方法及び管理装置を提供する。
【解決手段】コンクリート製造設備によって生成されたコンクリートの生成時間及び性状情報をコンクリート生成のたびに順次記憶し、コンクリートの生成時間及び性状情報をトンネル掘進装置側から出力されるトンネル掘進機の位置情報と対応させて記憶する。
(もっと読む)
1 - 20 / 101
[ Back to top ]