
Fターム[2F062HH21]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | 測定圧の付与 (325)
Fターム[2F062HH21]の下位に属するFターム
一定化 (59)
Fターム[2F062HH21]に分類される特許
21 - 40 / 266
ボールねじ軸の累積リード誤差測定装置及び測定方法
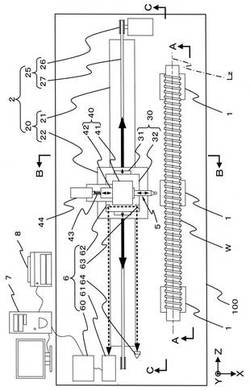
【課題】再現性の高い高精度の測定を、短時間で行える生産性に優れたボールねじ軸の累積リード誤差測定装置及び測定方法を提供する。
【解決手段】被測定ボールねじ軸Wを回転不動に固定する固定支持台1と、前記被測定ボールねじ軸Wのねじ溝に当接させるボール接触子5と、ボール接触子5を被測定ボールねじ軸Wの軸心Lzに対し直交方向に往復移動させるとともにボール接触子5を所定の押し込み力で前記ねじ溝に当接させるボール接触子スライド手段と、ボール接触子スライド手段を軸心Lzと平行に水平往復移動する位置検出スライド手段と、位置検出スライド手段を前記被測定ボールねじ軸Wのねじ部間で往復移動させる位置決め往復スライド手段2と、ボール接触子5の軸心Lz方向における位置を検出するリード位置測定手段6と、を備える。
(もっと読む)
計測装置、計測方法、プログラム、および、記録媒体

【課題】被計測物の周囲の形状を手軽に計測する。
【解決手段】バンドは、互いに平行な連結軸であるジョイントを介して複数のパネルが連結され、ジョイントを軸にして隣接するパネル間の角度であるパネル間角度を調節可能である。各ジョイントには、パネル間角度を検出する角度センサが設けられている。そして、検出された各パネル間角度に基づいて、バンドが装着された被計測物の周囲の少なくとも一部の形状である周囲形状が計測される。本技術は、例えば、腹囲計測装置に適用できる。
(もっと読む)
内周面測定装置
【課題】エンジンのシリンダブロック等の貫通穴の内周面を簡便に測定する内周面測定装置を提供する。
【解決手段】内周面測定装置1は、測定スピンドル29と第1支持部5と第2支持部17とガイドブロック48とを有する。第1支持部5及び第2支持部17はシリンダブロック2の両端面に着脱自在に取付られ、シリンダブロック2の貫通穴3に挿通された、測定スピンドル29を回転自在に支持する。測定スピンドル29は、円筒形状であり、内面32を切欠いて回転軸30の方向に略平行にのびるスリット33を有する。測定スピンドル29の内側に配置されるガイドブロック48には、貫通穴3の内周面4を計測する変位センサ51が固定される。ガイドブロック48は、スリット33に係合し回転軸30に沿って測定スピンドル29内を手動でスライド移動する。任意の測位位置において測定スピンドル29を手動で回転させて、内周面4の形状測定を行う。
(もっと読む)
表面性状測定機
【課題】高精度で、しかも、スタイラスや測定アームなどの汚破損を少なくできる表面性状測定機を提供する。
【解決手段】表面性状測定機において、測定アーム24は、ケーシング28内においてブラケット22に回転軸23を支点として円弧運動可能に支持された第1測定アーム24Aと、これの先端に着脱機構25を介して着脱可能に設けられ先端にスタイラス26A,26Bを有する第2測定アーム24Bとを含んで構成され、着脱機構はケーシング内に配置される。測定アームの円弧運動量を検出する変位検出器27は、測定アームに配置されたスケール27Aと、ブラケット22にスケールに対向して配置された検出ヘッドとを含んで構成され、スケールの検出面が測定アームの軸線上で測定アームの円弧運動面上に配置される。
(もっと読む)
ボールねじの測定装置および測定方法
【課題】ボールねじナットの内周面の溝形状の検査を容易且つ短時間で行う。
【解決手段】ボールねじナットを回転テーブル22により回転自在に支持するとともに、その回転角度をロータリエンコーダ23で測定し、測定子3をXYZテーブル12により、XYZ方向に移動自在に支持するとともに、測定子3がボールねじナットの方向に移動するX軸方向の変位をリニアゲージ13により測定し、測定子3が上下に移動するZ軸方向の変位をダイヤルゲージ14により測定する。これらセンサの検出信号をもとに、ボールねじナットにおける測定子3の位置座標を演算し、位置座標をもとにボールねじナットの各部の測定を行う。
(もっと読む)
下地材探知具
【課題】探知針の差し込み作業中でも、測定筒体に嵌挿している目盛を指示する測定体が、確実に差し込み深さ目盛を指示し、測定位置の高低にも拘らず測定作業をスムーズに処理できる下地検知具を提供する。
【解決手段】探知針jを出入する針孔を有する筒体a内に一端部が嵌挿し、他端部17が飛出し、且内挿するコイルスプリングの付勢によって押圧される前記探知針jを飛出せしめる測定筒体dを有する下地材探知具において、前記測定筒体dの外周面部13に飛出した探知針jの長さに比例する目盛14を付記せしめると共に、前記測定筒体dに嵌挿する測定体kを嵌挿せしめた。
(もっと読む)
形状測定装置及び方法
【課題】 プローブによって、垂直へ切り立った壁面や穴の内面であっても、安定して接触力を制御し、高速な形状計測を行うこと。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面と移動手段の方向の関係を推定する。その結果、被測定面と垂直に近い状態であると判断された方向の移動手段のみによって、プローブの接触力制御を行うこと。
(もっと読む)
ガイド機構および3次元測定機
【課題】基準面側の荷重が変化した場合にも、基準面側のエアベアリングとガイドとの間の隙間を適正な所定値に保つことができるガイド機構およびそのガイド機構を有する3次元測定機を提供する。
【解決手段】第1の側に基準面を有するガイドと、前記基準面に沿ってスライド可能に前記ガイドに設けられる被案内部材と、前記ガイドの前記基準面との間に第1の隙間を有するように前記基準面を押圧し、前記被案内部材に設けられる基準側案内部材と、前記基準面と反対側の前記ガイドの第2の側面との間に第2の隙間を有するように前記第2の側面を与圧し、前記被案内部材に設けられる与圧案内部材と、を有し、前記第1の隙間が所定値になるように、前記予圧との位置が前記被案内部材に対して上下動するように設けられる前記押圧との相対関係が調整可能であることを特徴とするガイド機構である。
(もっと読む)
円環状測定物の軸方向形状測定用治具及び軸方向形状測定装置
【課題】円環状測定物の測定点における外周位置及び内周位置の各軸方向形状を正確に測定するための円環状測定物の軸方向形状測定用治具及び軸方向形状測定装置を提供すること。
【解決手段】円環状測定物8の軸方向形状測定用治具1は、円環状測定物8の測定点Pにおける外周位置及び内周位置の各軸方向形状をそれぞれ測定する際に用い、架台2、回動軸3、回動ベース4及び保持する複数の保持クランプ41を備えている。複数の保持クランプ41は、回動軸3の回動中心Aに円環状測定物8の測定点Pを合わせて円環状測定物8を保持する。回動ベース4は、回動軸3の回動中心Aを中心に回動することによって測定点Pを中心に回動して、測定点Pの外周位置を所定の測定方向に向けた第1回動位置401と、測定点Pの内周位置を所定の測定方向に向けた第2回動位置とに回動停止させる。
(もっと読む)
接触式形状測定装置
【課題】 回折光学素子のように段差を有する光学素子であっても、高精度に面形状を測定することができる接触式形状測定装置を提供する。
【解決手段】 被測定面を安定して倣い走査している状態のプローブ速度である目標速度と、目標速度とプローブ速度の差であるプローブ速度エラーに基づいて、プローブに作用力を加える。これにより、安定して倣い走査している状態のプローブ速度を目標にして、プローブに作用力を加えるため、不安定な測定区間を短縮することができる。
(もっと読む)
ワーク寸法計測装置及びワーク寸法計測方法
【課題】計測精度の向上を実現したうえで、寸法計測から計測後の検査記録作成までの作業コストの低減及び作業時間の短縮を実現でき、平坦度や捻れ等の三次元データをも得ることが可能であるワーク寸法計測装置及びワーク寸法計測方法を提供する。
【解決手段】セグメントWの寸法を計測するワーク寸法計測装置1であって、多関節アーム12を具備して、アーム12の先端に有する探触子11をセグメントWに接触させることで三次元座標値を得る複数の測定機10と、複数の測定機10の相対位置関係を校正する作業及び該複数の測定機10で得られた各三次元座標値に基づいてセグメントWの寸法を自動算出する作業を行う校正演算手段21と、校正演算手段21からの校正結果及び演算結果に基づいてセグメントWの寸法計測結果を評価する計測評価手段22と、計測評価手段22からの計測結果を検査記録にまとめて出力するデータ管理手段31を備えている。
(もっと読む)
厚み測定方法
【課題】 測定子と測定テーブルとの平行出し作業が不要で、特殊な測定子を用いなくて済み、被測定物の厚み寸法を高精度に測定できるとともに、測定力を調整することもできる厚み測定方法を提供する。
【解決手段】 厚み測定方法は、互いに平行な下端面31A2と上端面31B1とを有する治具本体31および治具本体31に着脱可能に装着され重さが調整可能な補助ウェイト32を有する測定治具3を準備する準備工程と、測定テーブル15に下端面31A2を載置するとともに、上端面31B1に測定子18を当接させ、このときのスピンドル17の移動量を基準位置として設定する基準位置設定工程と、測定テーブル15にフィルム2を載置したのち、このフィルム2の上に下端面31A2を載置するとともに、上端面31B1に測定子18を当接させ、このときのスピンドル17の移動量と基準位置との差からフィルム2の厚み寸法Tを求める測定工程とを備える。
(もっと読む)
穴検査装置
【課題】穴検査装置において、検査作業の作業性の向上を可能とする。
【解決手段】直交するX方向及びY方向に沿って検査ヘッド105を移動自在に支持し、この検査ヘッド105に対して測定ヘッド125,126をX方向及びY方向に直交するZ方向に沿って移動自在に支持し、この測定ヘッド125,126に複数の第1測定子127と複数の第2測定子128とを並んで並設し、Z方向に対して後退可能であると共に前進した位置に保持可能とする。
(もっと読む)
形状測定センサ
【課題】被検物を傷めることなくより短時間で表面形状測定を行うことができる形状測定センサを提供する。
【解決手段】被検物100の表面形状を測定するための形状測定センサ1は、自身の軸方向に摺動可能に支持され、軸方法に摺動することにより被検物の表面形状に追従するプローブ11と、プローブを軸方向に摺動可能に支持する静圧軸受12と、プローブを、その摺動範囲内における中間部の所望の位置に位置決めして保持する第一の状態と、プローブの摺動に干渉しない第二の状態とに切り替え可能なストッパ部60とを備えることを特徴とする。
(もっと読む)
円筒体の円周寸法測定装置および円周寸法測定方法
【課題】円筒体の円周寸法(外周長)を簡単な方法でかつ精度良く測定することができ、このような測定作業の効率を向上させることができる円筒体の円周寸法測定装置および円周寸法測定方法を提供する。
【解決手段】円筒体の円周寸法測定装置10は、印刷用ロール50の外周面にそれぞれ当接されるべき2つの平面14を有し、これらの2つの平面14が所定の角度θをなして配置される本体部12と、印刷用ロール50の軸方向に直交する平面において本体部12の2つの平面14の交点Pから印刷用ロール50の外周面までの最短距離Yを測定する距離測定部20と、を備えている。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
外径測定装置およびころ軸受製造方法
【課題】対象物のチャッキングとチャッキング解除動作が不要となって、作業性の向上を図ることが可能な外径測定装置及びころ軸受の製造方法を提供する。
【解決手段】被測定物10を横倒し状として下方から受体11にて受けられ、軸心方向の移動及び軸心廻りの回転を許容する。駆動手段12にて、受体11にて受けられている被測定物10をその軸心廻りに回転させてその軸心方向の一方に移動させる。被測定物10は、軸方向の移動が受部材13にて規制される。外径寸法測定手段14にて、受部材13にて軸心方向の移動が規制されている被測定物10がその軸心廻りに回転している状態で被測定物10の外径寸法を測定する。
(もっと読む)
平衡度測定装置及び平衡度測定方法
【課題】工具の平衡度を、該工具の先端の形状や温度等に依存せず、短時間で精度良く測定することができる平衡度測定装置及び平衡度測定方法を提供する。
【解決手段】工具Tが離間可能に当接される測定面11を設けた測定部10と、測定部10の測定面11に対向した付勢面11bに当接し、測定部10を付勢する付勢部21と、測定部10の付勢面11bに当接した状態で設けられ、工具Tに当接された測定部10が付勢されている方向と反対の方向に移動した場合に、測定部10の位置を検出する検出部31と、測定部10の測定面11の側に設けられ、付勢部21に付勢された測定部10を離間可能に係留して停止させる係留部40と、検出部31と電気的に接続され、検出部31が検出した測定部10の位置の変化量又は位置の絶対値を報知する報知部とを有する。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
形状測定センサ
【課題】プローブの構成に関係なく、先端にかかる負荷を高感度に検出することができる形状測定センサを提供する。
【解決手段】被検物の表面形状を測定するための形状測定センサは、自身の軸方向に摺動可能に支持され、軸方法に摺動することにより被検物の表面形状に追従するプローブ11と、プローブに向かって流体を供給しつつ、プローブを軸方向に摺動可能に支持する静圧軸受12と、流体の動態の変化を監視することにより、プローブの先端部にかかる負荷を検出する加速度センサ16とを備えることを特徴とする。
(もっと読む)
21 - 40 / 266
[ Back to top ]