
Fターム[2F063AA37]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定内容 (2,719) | 角度 (791) | 方向、傾斜、倒れ、姿勢 (58)
Fターム[2F063AA37]に分類される特許
21 - 40 / 58
移動体位置検出装置
【課題】コンピュータに依存することなく、装置の故障を検出すること。
【解決手段】円筒状の磁石42が固定され傾倒可能に配設された移動体(シフトレバー4)と、磁石42の周面に対向配置され移動体の直交する方向の傾倒量を検知するGMRセンサ71、72と、磁石42の周面に対向配置されGMRセンサ71、72のいずれの検知面とも平行でない位置に検知面が配置されたGMRセンサ73と、GMRセンサ71、72による検知値と、GMRセンサ73による検知値とに基づいて少なくともGMRセンサ71〜73のいずれか1つの故障を判定する判定回路(加算回路74、比較回路75)とを具備することを特徴とする。
(もっと読む)
位置姿勢検出システム及びその検出方法並びに位置姿勢検出装置

【課題】交流磁場を利用して連続的に測定ができ、かつ周波数の設定の自由度が大きく、しかも構成が簡単な位置姿勢検出システムを提供すること。
【解決手段】Xg軸コイル電源群1aとXg軸コイル群1bとからなるXg軸方向磁場発生部1は、指向性を有する交流磁場を少なくとも1つ発生する。Yg軸コイル電源群2aとYg軸コイル群2bとからなるYg軸方向磁場発生部2は、Xg軸方向磁場発生部1とは異なる指向性で、かつXg軸方向磁場発生部1が発生する磁場の周波数とは異なる周波数を有する交流磁場を少なくとも1つ発生する。磁場検出部11は、Xg軸方向磁場発生部1とYg軸方向磁場発生部2から発生する磁場を検出する多軸の磁気センサ10a,10b,10cを有する。演算部4は、Xg軸方向磁場発生部1とYg軸方向磁場発生部2と磁場検出部11の方向関係を特定することで磁場検出部11の位置情報と姿勢情報を算出する。
(もっと読む)
相対変位測定センサーが設けられたダンパー
【課題】 相対変位測定センサーが設けられたダンパーを提供する。
【解決手段】内部に中空部を有するシリンダー11と、シリンダーの上部から挿入され、表面に多数の凹部と多数の凸部が交代に形成されたグルーブパターンを有するピストンロッド13と、ピストンロッドの端部に連結されてシリンダーの内部で往復運動を行い、上下に貫通された流体通過孔を有するピストンバルブ12と、シリンダーの上端を密閉しながらピストンロッドの直線運動をガイドし、一側に貫通孔を有するロッドガイド14と、ロッドガイドに結合し、ピストンロッドが移動するとき発生する磁場の変化を用いてピストンロッドの動きを非接触式に感知するセンサーモジュール100とを含むダンパー10に関するものである。
(もっと読む)
外科用針を患者の身体の臓器へ進めるためのシステムおよび方法
【課題】外科用針を患者の身体の標的臓器へ進めるための新規の方法およびシステムを提供する。
【解決手段】外科用針106を患者の身体の標的臓器へ進めるためのシステム100であって、そのシステムが着脱可能なマンドレル108と、医療用測位システム(MPS)102と、電磁場発生装置104と、MPSセンサユニット110を含み、着脱可能なマンドレルが外科用針の内部に設置され、その着脱可能なマンドレルが外科用針に出し入れすることができて、その着脱可能なマンドレルの先端にMPSセンサが設置され、電磁場発生装置が電磁場を発生させ、MPSがMPSセンサおよび電磁場発生装置に連結され、電磁場に基づいてMPSセンサが出力を生成し、MPSがMPSの各座標系における着脱可能なマンドレルの先端の位置を確認し、MPSが着脱可能なマンドレルの先端の位置の各示度を生じ、外科用針を標的臓器へ進めることが可能になる。
(もっと読む)
カテーテル追跡システム
【課題】較正を簡略化し、かつ測定精度の向上を可能とするカテーテル追跡システムを提供する。
【解決手段】人または動物の身体1の部分内でカテーテル頭部16の位置を位置決めおよび追跡するための、図1、図2および図3に示したようなカテーテル追跡システム。このカテーテル追跡システムは、人または動物の身体を介して所望の位置に導かれるように構成された頭部16を有するカテーテル10と、複数の磁界変換器であって、そのうちの少なくとも1つがカテーテル18上に配置され、他のものが身体内部および/または周囲に配置されると共に基準変換器19として機能する複数の変換器と、複数の磁界変換器を付勢する制御ユニットとを備える。磁界信号を処理する際、基準変換器19に対してカテーテル頭部16の位置を決定する。
(もっと読む)
変位検出装置、傾斜計および加速度計
【課題】
検出感度が高く、測定レンジの広い傾斜計を得ることを目的とする。
【解決手段】
傾斜計2は、ハウジング部10から吊り下げられた内側振子部24を備えている。内側振子部24には、内側磁石32が固定されており、ハウジング部10には外側磁石30が設置されている。また、内側振子部24には、発磁体36が固定され、ハウジング部10にはコイル部38が固定され、内側振子部24が初期位置から変位した場合は、発磁体36とコイル部38の間に吸引力が発生される。
(もっと読む)
位置検知センサ
【課題】外部から移動子の動きを簡単且つ確実に検出・確認できる。
【解決手段】油圧ポンプに傾斜可能なヨークに連動する移動部材14を設ける。移動部材の移動を検知するストロークセンサ15を設け、固定された抵抗体素子17とブラシ18からなる可変抵抗器16を有する。ブラシは移動部材14に固定し、移動部材と一体に移動して可変抵抗器16の出力電圧を変化させる。可変抵抗器16で検出した移動部材14の移動情報としての電圧はA/D変換器19でデジタル信号に変換し、発光ダイオード20で光電変換する。発光ダイオードは光信号をコントローラ21にパケット通信で送り移動情報を電気的に検出し表示する。光信号の光路には移動部材14に固定した半透過ミラー23を設け、光信号の一部を反射させて開口部24を通して外部から観察する。開口部24の近傍に目盛り25を設けて反射光の移動で移動部材の移動量を測定する。
(もっと読む)
タイヤに備え付けられたセンサの注目に値する角度位置を計時する方法
【課題】タイヤに備え付けられた少なくとも1つのセンサの注目に値する角度位置を計時する方法を提案する。
【解決手段】本発明は、外部基準系に対して回転するタイヤ(10)に備え付けられた少なくとも1つのセンサ(12)の注目に値する角度位置(Qr)を計時する方法であって、センサ(12)からの出力信号(s(t))からタイヤ(10)の一回転中に注目に値する極値を与えるのに適した基準信号(sr(t))を生成するステップと、センサの元々の角度位置(Q0)の時刻(t0)を基準信号の注目に値する極値の時刻であると決定するステップと、元々の角度位置の時刻に対する注目に値する角度位置(Qr)の時刻(tr)を決定するステップとを有することを特徴とする方法に関する。
(もっと読む)
検知体位置検出システム
【課題】 検知体を検出空間内に導入した後に、検知体を取り除くことなく、キャリブレーションを行うことができる検知体位置検出システムを提供する。
【解決手段】 位置検出用磁界を発生する磁界発生部3と、共振磁界を発生する共振回路21と共振回路21の経路を接続または切断する外部信号型スイッチとを有する検知体5と、外部信号型スイッチの接続または切断を制御するスイッチ制御部7と、位置検出用磁界および共振磁界の少なくとも一方の磁界強度を検出する位置検出用磁界検出部9と、位置検出用磁界検出部9の検出信号に基づき、検知体5の位置および向きを算出する位置算出部11と、が設けられたことを特徴とする。
(もっと読む)
角度応答検出信号合成方法および装置
【課題】複数の角度センサから得られる角度応答における不連続点を除去する。
【解決手段】対象角度を測定する第一の角度センサと、前記第一の角度センサに較べて狭レンジであって、前記対象角度を前記第一の角度センサよりも高精度に測定する、第二の角度センサと、第一の角度センサから得られた第一の角度応答検出信号と、第二の角度センサから得られた第二の角度応答検出信号とを、前記第一の角度応答検出信号と前記第二の角度応答検出信号とのそれぞれに対して屈曲点の無い関数を用いて重み付けを行ってから合成することによって、制御演算の定義域において時間で微分可能な合成角度信号を生成する、合成角度信号生成ユニットとを含む角度応答検出信号合成装置を構成する。
(もっと読む)
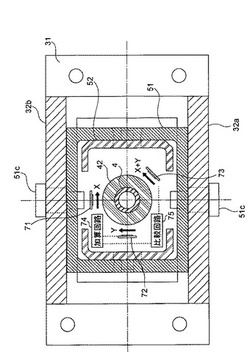
等速自在継手のボール挙動計測装置
【課題】等速自在継手のボールの挙動を検出できて、ボールの剥離等による寿命を把握できる等速自在継手のボール挙動計測装置を提供する。
【解決手段】ボールポケットを有するボール支持体6をケージ16に周方向のスライドを可能として付設する。ボールのうちの一つを着磁ボール5aとする。着磁ボール5aをボールポケットに回転可能に支持させる。ボール支持体6に、着磁ボール5aの中心が原点となる3次元座標系のX,Y,Z軸のうちのX、Y軸方向のボール磁軸の変化を検出するX成分検出器50及びY成分検出器51を配置する。3次元座標系のZ軸方向の磁路を有する磁気回路75を構成して、ボール支持体6から離れた位置に、Z軸方向のボール磁軸の変化を測定するZ成分検出器52を配置する。
(もっと読む)
位置検出装置および自動車用ミラーの鏡面角度検出装置
【課題】移動体の位置に対する磁気センサ出力の特性において良好な直線性が得られる範囲の拡大を図った位置検出装置およびこの位置検出装置を利用した自動車用ミラーの鏡面角度検出装置を提供する。
【解決手段】2個の永久磁石42,44と1個のホール素子46を用いる。永久磁石42,44は相互の位置関係が固定に配列される。ホール素子46は永久磁石42,44の配列に対しその側方に配置される。永久磁石42,44とホール素子46とは永久磁石42,44の配列方向と平行な方向Eに相対移動する。永久磁石は、ホール素子46に対面する側の面42a,44aが相互に逆極性の磁極面を構成しかつ該磁極面42a,44aどうしが互いに内向きに傾斜して配置されている。ホール素子46の磁気センシング方向Fは永久磁石42,44の配列方向と直交する方向に設定されている。
(もっと読む)
磁気マッピング装置
【課題】 磁気方式のHMTの使用する上で必要な磁気データの取得を短時間で行うことができる磁気マッピング装置を提供する。
【解決手段】 磁気ソース2と、支持体16と、支持体に取り付けられ磁界中の磁気データを測定する磁気センサ3と、支持体の外表面に取り付けられ磁気センサに対する位置が固定された少なくとも3つのマーカ群18と、3つのマーカを同時にステレオ視するための一対のカメラ12、14と、一対のカメラで撮影された各画像に同時に映る3つのマーカの画像上の位置に基づいてこれら3つのマーカの位置座標を求めるとともに求めた3つのマーカの位置座標に基づいて磁気センサの位置座標を算出する磁気センサ位置算出部21と、算出された磁気センサの位置座標とカメラ画像の撮影時に測定された磁気データとに基づいて位置座標と磁気データとを対応付けた磁気マッピングデータを蓄積する磁気マッピング部22とを備える。
(もっと読む)
高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システム
【課題】振幅に加え位相も計測対象として位置精度を向上させる高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システムを提供する。
【解決手段】励磁コイルと、この励磁コイルと対向する複数の検出コイルと、励磁コイルと検出コイルとの間に配置されるLC共振型磁気マーカと、励磁コイルはLC共振型磁気マーカの共振周波数に同調させた交流磁界を発生させ、LC共振型磁気マーカからの誘導磁界を複数の検出コイルの各検出コイルで計測する手段と、LC共振型磁気マーカをセットした状態での検出コイルによる第1の誘起電圧を計測する手段と、LC共振型磁気マーカをセットしない状態での検出コイルによる第2の誘起電圧を計測する手段と、第1の誘起電圧と第2の誘起電圧の位相差θを求める手段と、この位相差に基づいてLC共振型磁気マーカの寄与電圧を求める手段とを具備する。
(もっと読む)
傾斜検出装置、及び傾斜検出装置を備えた車両
【課題】 コスト高を抑制しつつ、外乱による影響を受けにくいセンサを取り付けることにより、車両の傾斜角度を検出することができる傾斜検出装置、及び傾斜検出装置を備えた車両を提供する。
【解決手段】 車両の前後に位置する複数の車輪に加わる荷重に応じて長さが変動する緩衝部材を備え、該緩衝部材の長さの変動量に基づいて、車両の前後方向の傾斜角度を検出する傾斜検出装置において、緩衝部材は、作動液を充填した内筒と、該内筒との間に空気室を形成する外筒と、該内筒に対して移動可能なピストンと、該ピストンの移動により内筒から作動液を空気室へ誘導するオリフィスと、空気室内に配置してあるサーミスタとを有し、サーミスタに係る電気量に基づいて緩衝部材毎の長さの変動量を検出し、前後に位置する車輪に設置してある緩衝部材の長さの変動量に基づいて車両の前後方向の傾斜角度を算出し、算出した傾斜角度を外部へ送出する。
(もっと読む)
センサ装置を備えたボールジョイント及び摩耗測定のための方法
本発明は、例えば自動車の車軸システムのためのボールジョイント、並びにボールジョイントにおける摩耗測定のための方法に関する。このボールジョイントは、環状又は鉢状のジョイントハウジング(1)を有しており、該ジョイントハウジング(1)のほぼ円筒形の内室内にボールソケット(2)が配置されている。該ボールソケット(2)内に、ボールピボット(4)のボール(3)が滑動可能に受容されている。さらにまた、ボールジョイントは、力若しくは負荷を規定するためのセンサ装置(7)を有している。
本発明によるボールジョイントは、前記センサ装置(7)が、曲げ弾性的なプレート(6)上に配置されていることを特徴としている。該プレートは、ジョイントハウジング(1)内に固定されており、この場合、前記センサ装置(7)は、センサプレート(6)の機械的な応力若しくは撓みを測定するように調整されている。前記ボールジョイントはさらに伝達部材を有していて、この伝達部材によって、ボールソケット(2)の変形時に力又は曲げモーメントが前記センサプレート(6)内に導入されるようになっている。
本発明によるボールジョイントは、頑丈で安価に製造可能であって、ボールジョイントに作用する負荷若しくは力を測定することができる。本発明の方法によれば、ボールソケットのプリロードを測定することによってボールジョイントの摩耗状態を永久的に確認することができる。  (もっと読む)
(もっと読む)
ポインティングデバイス,モーションセンサー並びに文字認識装置および位置データ演算方法
【課題】 磁気センサーにより画面上の特定位置を指定する磁気検出型入力デバイスにおいて、ホール素子の個数を少なくし、簡素かつ小型で一定の磁気検出精度を発揮させる。
【解決手段】 磁気ペン10によって描画されるパレット12と、Z軸方向と交叉する交叉面上の中心位置C2とパレット12上の中心位置C1とが同軸に配置され磁気ペン10の3軸各磁気成分に応じた3つの計測データを出力する磁気センサー14と、仮想パレット12上の中心位置を原点に設定し磁気センサー14から出力された3つの計測データと予め計測した3つの基準データとの各変化量を表す3つの磁気ベクトルのそれぞれに基づいて、磁気ペン10の位置データを計算する演算処理部5とをそなえて構成する。
(もっと読む)
6次の自由度の統合コイルAC磁気トラッカー
【課題】6次の自由度を有するトラッキング(追跡)を広く利用可能にする。
【解決手段】磁気トラッカーの市販品供給業者から得られた3軸磁場源コイルと3軸センサコイルが、駆動及び検知回路と一体化され、2つのモジュール内に完全な6次の自由度のトラッカーを与える。即ち、センサモジュールと磁場源モジュールにより、同一の設計の少なくとも第2のセンサを有し、追跡できる。基本的トラッカーモジュールの一方又は両方は、それぞれの印刷回路基板上に取り付けても良く、磁場源モジュールは、ハードウェアを減らすため、デジタル波発生と、同調コイルドライバとを利用しても良い。コイルの組の一方又は両方は、非同心でも良く、ホストコンピュータにP&Oアップデートを提供するための出力は、ホストコンピュータから電力を受取るUSB/USB2等のコネクタを利用しても良い。システムのコストを更に減らすため、センサコイルが受取った信号を増幅するのに使用する回路は、磁場源基板上のプロセッサの制御の下で複合化しても良い。
(もっと読む)
位置角度検出装置およびこれを用いたヘッドモーショントラッカ
【課題】 電磁ノイズが重畳された信号を受信した場合であっても、ノイズの影響を除去して正確な位置・角度を得ることができる位置角度検出装置を提供する。
【解決手段】 交流基準信号を生成する基準信号生成部と、交流基準信号に基づいてコイルを励磁することにより空間に交流磁界を発生する磁気ソースと、交流磁界が発生している空間内の任意の地点における交流磁界を検出する磁気センサと、磁気センサから出力される検出信号に含まれるノイズ成分を抽出するノイズ成分抽出部と、検出信号からノイズ成分を除去した訂正検出信号を生成する訂正検出信号作成部と、訂正検出信号に基づいて磁気センサの位置および角度を算出する位置角度演算部とを備え、算出した磁気センサの位置および角度から磁気センサを取り付けた物体の位置および角度を求める。
え、算出した測定誤差をグラフィック表示する。
(もっと読む)
マルチスケール定位方法
キャプチャ範囲および精度と解像度を固定した定位システムを用いて位置測定がされることが多い。キャプチャ範囲を固定すると、精度と解像度が低くなることが多い。本発明によると、最初にキャプチャ範囲を大きくして、精度と解像度は低くしておく。この大きなキャプチャ範囲内でターゲットエリアを特定し標的とする。このように特定しておいて、キャプチャ範囲を反復的に狭くし、リージョンオブインタレストを中心にする。こうすることにより、精度と解像度を上げることができる。 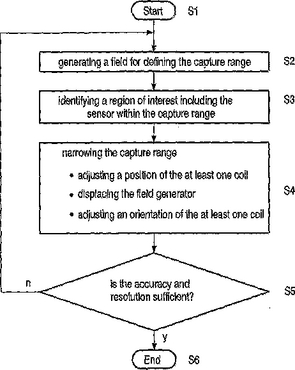 (もっと読む)
(もっと読む)
21 - 40 / 58
[ Back to top ]