
Fターム[2F063DD06]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 多数の検出器 (327)
Fターム[2F063DD06]の下位に属するFターム
2次元状に配列された検出器 (121)
Fターム[2F063DD06]に分類される特許
41 - 60 / 206
被験者に関する情報を送信するための多モード方法およびシステム
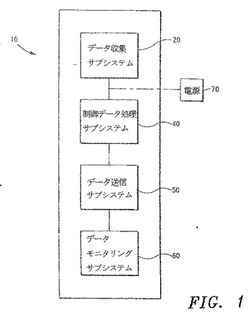
【課題】被験者に関連する生理学的情報、パフォーマンス情報および状況情報を示すシグナルを送信するための多モード通信手段を提供する。
【解決手段】例示的な実施形態において、多モード通信手段は、単一無線モードでは効果がないであろう広範囲の設定(settings)において獲得されるべき外部モニタリング機器への接続を可能にする多重無線サブシステム(またはモード)を含む。更に、本発明の多モード通信手段をリアルタイムデータ処理と組み合わせることにより、ユーザーに関係があると決定されたデータが識別された場合のみ通信の機能性に関与することが可能となる。
(もっと読む)
曲げセンサおよび変形形状測定方法

【課題】 歪みの入力速度に対する依存性が小さく、応答遅れが生じにくい曲げセンサを提供する。また、当該曲げセンサを用いた変形形状測定方法を提供する。
【解決手段】 曲げセンサ1を、基材10と、基材10表面に配置され、マトリックス樹脂801と、マトリックス樹脂801中に30vol%以上の充填率で充填されている導電性フィラー802と、を有し、導電性フィラー802同士の接触により三次元的な導電パスPが形成され、変形量が増加するに従って電気抵抗が増加するセンサ本体800と、センサ本体800を被覆するように配置され、弾性変形可能なカバーフィルム14と、センサ本体800に接続され、電気抵抗を出力可能な複数の電極12a〜12iと、を備えるように構成し、センサ本体800に、曲げ変形した時に導電パスPを切断する方向に、予めクラック803を形成しておく。
(もっと読む)
露光方法
ターゲットまでの距離を測定する複数センサ(30)のセットを具備するシステムにおいて、ターゲットの表面を露光する方法。方法は、ターゲットを可動テーブル(134)にクランプで留め、複数センサのうちの1つ以上がターゲットの上に位置を定められる複数の位置に、ターゲットを動かし、ターゲットの上に位置を定められているセンサのうちの1つ以上から、信号を受信し、複数センサから受信した信号に基づいて、1つ以上の傾斜修正値(Rx,Ry)を計算し、1つ以上の傾斜修正値に基づいて、可動テーブルの傾斜を調整し、ターゲットを露光することを含む。 (もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1及び第2の移動線y1、y2の中間位置に配置される第2のMR回路12と、第2の移動線y2に対し第1の移動線y1とは反対側にd1だけ離間する第3のMR回路13と、位置判定部40とを備える。この位置判定部40は、第1及び第2のMR回路11、12の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第3のMR回路12、13の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
測定値のサブセットを識別する方法および装置、対象物の位置を特定する方法およびシステム、これらの方法のための記録媒体
磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、a)磁界を放射するステップ、およびN個の実際の測定値のセットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いてこれらの磁界を測定するステップ(70)と、b)N個の測定値の中のサブセットMiに基づいて、対象物の位置の推定値Piを算出するステップ(72)と、c)推定位置Piと、対象物の位置をN個の測定値から成るセットに関連付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップ(74)と、d)ステップc)中に推定された測定値をステップa)中に求められた実際の測定値と比較することによって、この測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)とを有する。 (もっと読む)
変位センサおよび力検出装置
【課題】力・モーメントを独立検出する装置の薄型化を図る。
【解決手段】変位基板10側に電極E11,E12、固定基板20側に電極E21,E22を設け、両基板をバネ31〜34で接続する。E11,E21は、γ軸を中心とした円形電極で、αβ平面上へ投影すると、E21はE11内に包含される。E12,E22は、α軸方向にオフセット配置された矩形電極で、E12のβ軸方向幅は、E22のβ軸方向幅内に包含される。E11,E21間の容量値C1は、変位Dγの情報のみを示し、E12,E22間の容量値C2は、変位DαおよびDγの合成情報を示すので、両者を用いて、変位Dα,Dγを独立検出できる。より広い基板の複数N箇所にローカル原点Qを設定し、それぞれ所定の向きにαβγローカル座標系を定め、それぞれに同様の電極を配置する。各原点Qについての検出値Dα,Dγを統合して、基板全体に作用した力・モーメントを検出する。
(もっと読む)
センサ装置
【課題】薄型化並びに部品点数の削減による低コスト化と組立作業性の向上を図る。
【解決手段】第1及び第2の絶縁基板3,4の表面に印刷形成された第1検出コイル30A,30B,40A,40Bのインピーダンスが直線軌道上を変位する検出体51A,51Bの位置に応じて変化することを利用して直線上を移動する対象物の移動量や位置などを検出することができる。しかも、検出コイルが巻回されたボビンに導電性筒体を進退自在に外挿する従来例と比較して、検出コイル30A,30B,40A,40B並びに検出体51A,51Bを薄く且つ小さくすることができる。その結果、薄型化並びに部品点数の削減による低コスト化と組立作業性の向上が図れる。
(もっと読む)
複数のセンサー素子に対するセンサーエレクトロニクスおよびセンサー素子における物体の位置を決定する方法
複数のセンサー素子に対する複数の接続を有している電子回路が提供される。電子回路は、少なくとも1つの多重化法において、センサー素子の少なくとも1つの観測範囲における物体の存在を検出することと、センサー素子を区別することとを行うように構成されている。センサー素子の少なくとも1つの観測範囲にある少なくとも1つの物体の位置をセンサー素子に対して決定する方法も提供される。多重化法において、それぞれの観測範囲における物体の存在を示す各センサー素子に対する電気的な変数が検出される。 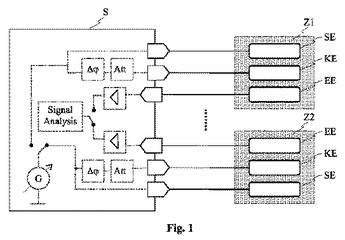 (もっと読む)
(もっと読む)
位置検出装置及びシフト装置
【課題】磁石に対する着磁パターン等を含む構成の簡素化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】各磁気センサ16a〜16gにおいて生成される二値信号の組合せがハミング符号をなすように磁石15の着磁パターン及び当該磁石15に対する各磁気センサ16a〜16gの相対的な位置関係が調節されている。このため、シフト装置では、1つの磁気センサに何らかの異常が発生した場合であれ、当該磁気センサにおいて生成される二値信号を含む誤った二値信号の組合せを訂正し、正しい二値信号の組合せとすることができる。さらに、2つの磁気センサに何らかの異常が発生した場合にも、その異常の発生を検知することができる。
(もっと読む)
金属体の断面形状測定装置
【課題】従来のような直接的な寸法測定又は重量測定によらずに、間接的に断面形状の変化を測定することを可能とする、金属体の断面形状測定装置を提供することを目的とする。
【解決手段】
導電性の液体中に浸された金属体の断面形状を測定する断面形状測定装置であって、金属体の近傍を取り囲むように配置される一又は複数の電極、又は周囲を移動可能に配置された単数若しくは複数の電極と、金属体と電極との間に交流電圧を印加して、金属体と電極との間の交流インピーダンスを測定する交流インピーダンス測定手段と、交流インピーダンスの測定値に基づいて、金属体の断面形状を同定する断面形状同定手段とを備えることを特徴とする。
(もっと読む)
金属物体認識方法及び金属物体認識装置
【課題】部材内部の金属物体を外部から簡易に把握する。
【解決手段】計測装置1の中に、連続的に万遍なくn個のコイルCが配置される。コイルCは、励磁コイルCaと、検出コイルCbとからなる。励磁コイルCaは、交流電圧の印加を受けて、外部に磁力線を発する。検出コイルCbは、励磁コイルCaの発した磁力線を受けて、相互誘導作用による電圧を生じる。そこで、励磁コイルCaと、検出コイルCbとの組合せ数であるnC2通りの電圧値を計測し、計測した電圧値に基づいて、柱状部材2内部の配筋出来形の状態をデジタルデータとして取得する。例えば、コイルCが12個あれば、66通りの電圧値が得られる。各電圧値を計測する際に、発電側の励磁コイルCaと、受電側の検出コイルCbとの組合せを切り換えるには、スイッチング回路(切換回路)を用いる。
(もっと読む)
テーパー状座面測定装置およびその測定方法
【課題】テーパー状座面の精度を測定することができるテーパー状座面測定装置を提供する。
【解決手段】テーパー面を有する座面101内に挿入されるヘッド部12と、ヘッド部表面に座面の深さ方向に少なくとも2つ以上設けられており、あらかじめ決められた基準点(ヘッド部表面)から座面101までのギャップ量を測定するギャップセンサー50と、を有することを特徴とするテーパー状座面測定装置。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
非接触動作検出装置
【課題】人との距離を高精度に求めることが可能な非接触動作検出装置を提供する。
【解決手段】本発明の一実施形態に係る非接触動作検出装置1は、人の動作に起因して生じる電気信号を非接触で検出する電極部10a〜10lと、電極部10a〜10lによって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部25とを備える。人の動作に起因して生じる電気信号は、足が離地する際に大きくなるパルス状をなしており、その周期は人の動作速度を示すこととなる。したがって、電気信号の振幅に加えて、電気信号の周期に基づいて人との距離を求めることによって、人の動作速度が変動して検出電気信号の振幅が変動しても、人との距離を高精度に求めることができる。
(もっと読む)
自動車駆動用モータの回転角度検出装置および回転角度検出装置付き軸受
【課題】コンパクト・軽量で簡単に組付けでき、外部での電気回路や部品を少なくできる自動車駆動用モータの回転角度検出装置および回転角度検出装置付き軸受を提供する。
【解決手段】回転角度検出装置1は、同心のリング状に設けられ互いに磁極数が異なる複数の磁気トラック2A,2Bを有する磁気エンコーダ2と、各磁気トラック2A,2Bの磁界をそれぞれ検出する複数の磁気センサ3A,3Bとを備える。各磁気センサ3A,3Bは、磁気トラック2A,2Bの磁極内の位置情報を検出する機能を有する。各磁気センサ3A,3Bの検出した磁界信号の位相差を求める位相差検出手段6と、この検出した位相差に基づき磁気トラック2A,2Bの絶対角度を算出する角度算出手段7と、この算出した角度情報を外部に出力する信号出力手段8とを設ける。磁気エンコーダ2は、自動車駆動用モータの出力軸51またはその軸受に設置する。
(もっと読む)
位置検出センサ
【課題】検出素子数を増やさずに出力の高分解能化を図る。
【解決手段】位置検出センサ1は、実装ヘッドH1〜H15と、仮想出力算出部11と、最端検出素子決定部12と、検出信号生成部13とを備える。実装ヘッドH1〜H15は、ガイドテープGTの幅方向に所定の間隔をあけて配置され、ガイドテープGTの磁束を検出する。仮想出力算出部11は、実装ヘッドH1〜H15の出力結果に基づいて、隣り合う実装ヘッド間に配置される仮想ヘッドの出力を補間により算出する。最端検出素子決定部12は、各実装ヘッドH1〜H15及び各仮想ヘッドのうち、出力が所定の閾値以上であって最端に位置する最端検出素子を決定する。検出信号生成部13は、最端検出素子の位置に基づいてガイドテープGTの位置情報を示す位置検出信号を生成する。
(もっと読む)
位置検出装置及びシフト装置
【課題】磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】シフトレバーに連動して直線的に変位する磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備える。また、第1の磁極部31に対応する複数個の磁界方向検出型の磁気センサ、及び第2の磁極部32に対応する複数個の単極検出型の磁気センサも備える。磁界方向検出型の磁気センサは磁石14の変位に伴う磁界方向の変化に応じた、また単極検出型の磁気センサは対応する磁極の極性に応じた二値信号をそれぞれ生成する。各磁気センサにおいて生成される二値信号の組み合わせは、ハミング符号に準拠する。
(もっと読む)
軸の回転モーメント及び/又は回転角度を検出するための装置
【課題】低コストで構成でき、かつ信頼できる測定結果が得られ、所要構成スペースが僅かであるような装置を提供する。
【解決手段】軸の回転モーメント及び/又は回転角度を検出するための装置であって、軸に対して同心的な回路支持体1が設けられており、該回路支持体には、電流を通す少なくとも2つの導体路区分2が配置されていて、軸に対して同心的な、前記回路支持体に対して相対的に回動可能な唯1つの信号発生エレメント3が設けられており、該信号発生エレメントは、導電材料から成る第1部分領域4と、非導電材料から成る第2部分領域5とを有しており、軸に回転モーメントがかけられると、信号発生エレメントが回路支持体に対して相対的に回動し、これにより前記導体路区分と信号発生エレメントの前記第1の部分領域との間のオーバーラップ面積が変化し、導体路区分のインダクタンスが変化する。
(もっと読む)
スマート材料:ナノチューブ検知システム、ナノチューブ検知複合材料、およびナノチューブ検知デバイスによる歪みの検知と応力の測定
【課題】材料における変位、衝撃、応力、および/または歪みを検出できるカーボンナノチューブを含んだデバイスを提供する。
【解決手段】デバイスは、複数のカーボンナノチューブを含む検知素子および前記複数のカーボンナノチューブと接触している電気プローブを含み、前記電気プローブは、測定可能な方法で前記複数のカーボンナノチューブの抵抗率の変化に敏感に反応し、前記電気プローブは、前記抵抗率の変化により生じる電圧の変化を測定し、ここで、前記電圧の変化は、−130V〜170Vの範囲でほぼ直線的に変化し、そして、前記デバイスを応力にさらす結果として前記電圧の変化が生じる。
(もっと読む)
移動情報測定システム及び移動情報測定方法
【課題】簡易かつ客観的に動体の移動情報を測定するシステム及び方法を提供すること。
【解決手段】移動情報測定システム動体の通路に沿って配置された複数の発電床と、複数の発電床の発電量を測定する電力測定装置と、複数の発電床の発電量を基に、通路における動体の移動に関する情報を測定する情報処理装置と、を備える。
(もっと読む)
41 - 60 / 206
[ Back to top ]