
Fターム[2F063DD06]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 多数の検出器 (327)
Fターム[2F063DD06]の下位に属するFターム
2次元状に配列された検出器 (121)
Fターム[2F063DD06]に分類される特許
161 - 180 / 206
エレベータのかご位置検出装置
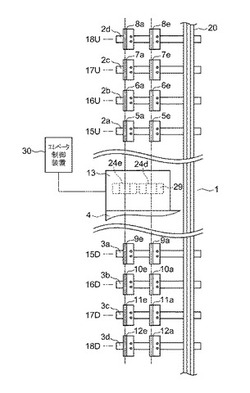
【課題】この発明は、設置スペースをより縮小することができるとともに、より簡単に据え付けることができるエレベータのかご位置検出装置を提供することを目的とするものである。
【解決手段】かご4には、検出エリアにおける静電容量を検出する検出センサ24d,24eが取り付けられている。各作動位置15U〜18U,15D〜18Dには、作動片5e〜8eが配置されている。作動片5e〜8eは、かご4の昇降により検出センサ24d,24eの検出エリアに相対的に進入する。また、作動片5e〜8eは、検出エリアに進入した状態での検出エリアの静電容量をそれぞれ異ならしめるようになっている。エレベータ制御装置30は、検出センサ24d,24eが検出した静電容量に基づいてかご4の位置を判定する。
(もっと読む)
膜厚計測装置及び方法

【課題】エンジンシリンダ内部のピストンリング摺動面における油膜の膜厚を、精度良く且つ低コストで計測することを目的とする。
【解決手段】シリンダライナのピストンリング摺動面と面一に設けられた電極とピストンリングとの間隙の静電容量を計測することによって前記間隙に形成された潤滑油の油膜の膜厚を計測する膜厚計測装置であって、前記電極に定電流を供給することによって前記静電容量に対して充電を行い、当該充電に伴う充電電圧の変化に基づいて静電容量を検出し、当該静電容量を示す検出信号を出力する静電容量検出部と、前記静電容量検出部から入力された検出信号が示す静電容量に基づいて油膜の膜厚を算出する膜厚演算部とを具備する。
(もっと読む)
回転角度検出装置
【課題】関節付き機械における関節部分や旋回軸付き機械における旋回軸の回転角度の検出に適用されて、小型・高分解能で、絶対角度の検出が可能であり、環境変化にも強く、組立性・組込性を向上させることができる回転角度検出装置を提供する。
【解決手段】 関節部分を有する建設機械または産業機械等の関節付き機械において、前記関節部分の回転角度を検出する回転角度検出装置である。前記関節部分を構成する互いに回転自在な一対の関節構成部材のうちの片方の関節構成部材に回転中心回りの円周方向異方性を有する磁気発生手段28を設ける。この磁気発生手段28の回転中心の軸方向に対向してもう片方の関節構成部材に、前記磁気発生手段28の磁気を検出する磁気アレイセンサ29を設ける。この磁気アレイセンサ29の出力から磁気発生手段28の回転角度を算出する角度算出手段30を設ける。
(もっと読む)
位置表示装置
【課題】 所望の範囲を移動する対象物の位置を表示することができ、かつ、対象物の表示範囲を容易に変更することができる位置表示装置を提供することを目的とする。
【解決手段】 磁石の作用を受けて開閉する磁性素子ME1〜ME4と、発光ダイオードD1〜D4と、第1の方向から移動してきた磁石Mgの作用を受けると、開状態又は閉状態になり、第1の方向とは逆方向の第2の方向から移動してきた磁石の作用を受けるまで、前記状態を保ち続ける記憶スイッチMRと、発光ダイオードD及び磁性素子MEに対応して一列に配置され、一端が対応する磁性素子MEに接続し、磁性素子MEが磁石Mgの作用を受けたときに励磁して、対応する発光ダイオードDとそれに隣接する発光ダイオードDを点灯させるリレーR1〜R4とを備える。
(もっと読む)
磁気衝突センサー
少なくとも1つの時間変化する信号(24)が、車両(12)と協働する関係にあって異なった場所(18.1、18.2、18.3、18.4、18.k)に広がって設けられた複数のコイル構成要素(14)に加えられる。コイル構成要素(14)は、車両(12)と相互作用する、対応する複数の磁場成分(30.1、30.2、30.3、30.4、30.k)を生成する。少なくとも1つの検知回路(32、32.1、32.2)が、コイル構成要素(14)からの信号成分に応答して検知信号(38)を発生させ、車両(12)の時期的状態の変化の検出を可能にする。 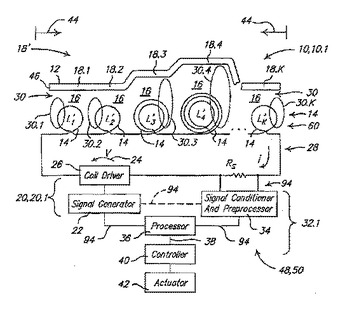 (もっと読む)
(もっと読む)
移動体システム
【構成】 レール側に永久磁石48〜50を走行方向に配列した被検出プレート14を設ける。天井走行車側には、コイル54を走行方向に配列すると共に、被検出プレート14を検出するための光センサ51〜53を備えたリニアセンサ12を設け、被検出プレート14と上下方向に対向させる。光センサ51〜53でカーブ区間と直線区間を識別し、リニアセンサの有効範囲を変更する。
【効果】 給電線からのノイズの影響が小さく、かつカーブ区間でも位置を認識できる。
(もっと読む)
フレキシブルセンサチューブ
【課題】
瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】
瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
ギャップ検出装置
【課題】 プラズマの発生状況が変化しても、精度よくノズルとワーク間のギャップを検出することができるギャップ検出装置を得ることを目的とする。
【解決手段】 中心電極ケーブル4を通る合成信号における周波数f1の成分と周波数f2の成分を検波する検波部8を設け、その検波部8により検波された周波数f1の成分と周波数f2の成分からノズル5とワーク6間のギャップに対応する検出信号を生成する。これにより、プラズマの発生状況が変化しても、精度よくノズル5とワーク6間のギャップを検出することができる。
(もっと読む)
磁気センサの位置計測方法
【課題】余分の格別な機能手段を用いることなく、低コストで精度良く、磁気センサの位置を計測し得る磁気センサの位置計測方法を提供する。
【解決手段】測定の都度、複数の磁気センサMD1,MD2、・・・、MDNを海中の所定領域2に展開配置する可搬型磁気測定装置において、磁気マーカーMMを移動艦艇Sの特定部位例えば船首STに固定し、移動艦艇Sが磁気センサMD1,MD2、・・・、MDNの配置領域2を移動し、磁気マーカーMMの発生磁界を磁気センサMD1,MD2、・・・、MDNで検出処理し、その検出磁気から各磁気センサの位置及び被測定艦艇と各自磁気センサの相対位置を求める。
(もっと読む)
被測定物表面の形状測定方法及び被測定物表面の形状測定装置
【課題】本発明は、測定誤差が生じにくい被測定物表面の形状測定方法及び被測定物表面の形状測定装置を提供することにある。
【解決手段】本発明は、被測定物の表面に追従して変形する可撓性基板7上に複数のコイル6A〜6Qを所定間隔で配列した測定用プローブ2を用いて被測定物18の表面形状を測定するに際し、蓄積データとして各種曲率半径と誘起電圧との関係を準備し、その後、前記測定用プローブ2を前記被測定物の表面に密着させた状態で前記コイルの一つを励磁して別のコイルで誘起電圧を検出するように順次切換えて行くと共に、検出した誘起電圧を前記蓄積データの誘起電圧と対応させて励磁したコイルと誘起電圧を検出したコイル間の曲率半径を算出し、その算出結果に基づいて順次各コイルの座標を求めて被測定物の表面形状を測定するようにしたのである。
(もっと読む)
内視鏡形状検出装置
【課題】必要に応じたタイミングで内視鏡の挿入形状を表示する。
【解決手段】検出装置21は、液晶モニタ25におけるスコープモデルの表示をオン/オフする切替スイッチ40と、ソースコイル14iの各位置を算出する位置算出部113と、位置算出部113が算出したソースコイル14iの各位置に基づき、電子内視鏡6のスコープモデルを生成するスコープモデル生成部114と、表示休止時画像格納部115に格納されている表示休止時画像とスコープモデル生成部114からのスコープモデル画像を選択的に液晶モニタ25に出力するセレクタ116と、これら各部を制御する制御部117とを備えて構成される。
(もっと読む)
平行度測定装置及び電気光学装置の製造方法
【課題】
高温下でも圧着部材の平行度を導電部材に押圧したまま容易に、しかも低コストで測定、調整できる平行度測定装置及びその平行度測定装置を用いて電気光学装置を製造する電気光学装置の製造方法を提供すること。
【解決手段】
平行度測定装置1は基板表面12に押圧により抵抗値が変わる複数の導電部材としてのセンサー3等を設け、そのセンサー3等の抵抗値または電圧値を測定する測定部11を具備することとしたので、例えば当該複数のセンサー3等の夫々の電圧値の変化をセンサー同士で比較することで、夫々のセンサーの位置における上圧着ヘッド16等による圧力の強さの違い、すなわち上圧着ヘッド16等の当該複数のセンサー表面に対する平行度を測定することができる。
(もっと読む)
接触検出器、指紋センサ及び指紋センサ製造方法
過電流が検出された際に接触センサの一部への電力供給を停止する電力スイッチを有する接触検出器を開示する。これにより、電力スイッチは、ラッチアップ又は他の電流を発生させる条件によって生じた過電流から接触センサを保護する。電流を発生させる条件は、多くの場合、接触検出器の表面におけるESD現象である。接触検出器は、物体の存在を検出するための露出表面と、絶縁表面と、絶縁表面の下に配置され、接触検出器の電力を制御する保護要素とを備える。保護要素は、接触検出器への電流が閾値を超えたことを検出すると、接触検出器への電力供給を停止する。接触検出器は、好ましくは、指スワイプセンサであるが、指又は他のパターンを有する物体と接触して機能する指位置センサ又は他の如何なるタイプの機器であってもよい。  (もっと読む)
(もっと読む)
車用静電センサー
【構成】多様な形態の電極(12)を使用した乗員センサーシステムが開示されている。電極(12)はエアバッグ噴出口(44)に隣接して設置でき、それぞれの電極は乗員の近接度に対応する信号を提供する。このシステムは1信号の場合よりも適切な決定を下すことができるように複数の信号を比較するコンパレータをさらに含んでいる。電極(12)を誘電基材(16)上に形成し、電極間をブロックするように提供された接地領域(14)で分離することができる。電極(12)を、片面に導電コーティングを施した誘電材料に取り付けられた導電材料で形成することができる。電極(12)を内装体内に接地導電材料と隣接させて埋設し、1電極にDC電圧を印加して第2電極への導電通路を形成することができる。その導電通路は湿気で提供される。ドライブ電極(22)とレシーブ電極(26)は車の窓と一体的に形成することができる。 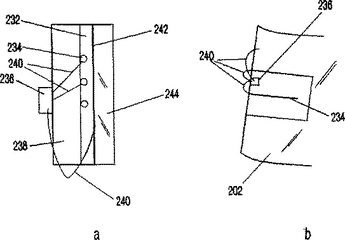 (もっと読む)
(もっと読む)
共通モード修正巻線及び簡素化された信号処理を有する誘導位置センサー
回転運動用誘導位置センサーは、送信コイル、及び送信コイルが交流電源により励磁される時に受信機信号を生成する受信コイルを含む。可動カプラー要素は、受信機信号がカプラー要素の位置に感応するように、送信コイル及び受信コイルとの間の誘導結合を変更する。受信機信号及び参照信号の比率は、カプラー要素の位置に感応するが、共通モード因子には実質的に感応しない。位置センサーの角度範囲又は位置範囲は、複数の受信コイルを使用して増大させることができる。 (もっと読む)
可動機械システムの位置を検知する方法及び装置
機械部品を含む可動素子の位置検知に関する。可動素子の動きによって磁場の動きを生成して、磁気センサで検出する。磁場及び/又は磁束の動き及び/又は変化は、センサ、対応する磁石、又は対応する磁性体の動きの組み合わせによって生成してもよい。磁気センサは、回転運動、線形運動の何れか、又は両方を測定できる。かかるセンサは、増分位置変化、絶対位置、又はその両方を表示できる。絶対位置及び高分解能位置検知は、線形運動及び/又は角運動の測定によって行える。好適な磁気センサとして、これに限定さないが、ホール効果装置及び/又は磁気抵抗素子が挙げられ、多極磁気センサを含んでもよい。電子制御装置などの信号調整及び/又は制御手段を用いてセンサからの出力信号を受信できる。 (もっと読む)
検査装置及び検査方法
【課題】 検査の信頼性が向上し、欠陥有無判定の自動化ができ、更に、検査の高速化が可能な検査装置及び検査方法を提供する。
【解決手段】 検査対象であるカム7の回転方向周表面を検査する検査装置1は、カム7の表面3次元情報を取得するセンサを備えたセンサヘッド19を有し、センサがカム7の回転に伴いカム7面に対し常に垂直となるように、Z軸上下駆動モータ16を介しセンサヘッド19が上下動できるように構成されている。
(もっと読む)
幾何学的形状の取得のための方法及び装置
本発明は、幾何学的形状を取得する方法及びデバイスに関する。本発明による方法は、1セットのセンサ(4a)をこの形状(曲線又は表面)の上に配置し、各センサが、このセンサの位置における曲線又は表面の向きを表わす信号を出力するステップ、曲線又は表面のモデルを選択するステップ、信号に基づいてモデルパラメータを決定するステップ、及びこれらのパラメータに基づいて幾何学的形状の上のポイントの空間分布を決定するステップを含む。本発明は特に、機械加工、建具、石工術、及び建築の分野への使用に適している。 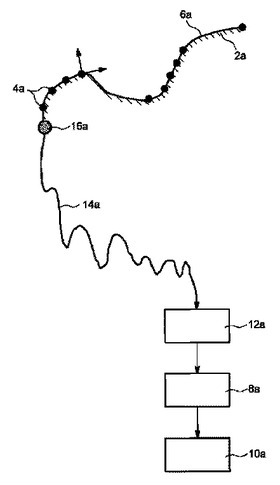 (もっと読む)
(もっと読む)
磁気マーキングによって包装材料の位置を検出する位置検出器および方法
包装材料(314、514、714)の位置を磁気マーキング(312、512、712)によって検出する位置検出器装置(100、200、900)において、位置検出器装置は、それぞれが出力信号を出す出力部を有する複数の磁気センサを含むセンサ・アセンブリを含み、磁気センサは、少なくとも2組のペア(208、209、301、302、501、502、701、702)として配置され、各ペア磁気センサは、それぞれ感度方向(308、309、310、311、508、509、510、511、708、709、710、711、808、809、811)が反対向きに配置され、更に、センサは、包装材料の磁気マーキングを感知するように配置され、センサの出力信号を合計して合計信号とするように設けられた結合器(210、211、212、910、912、914、1100、1203、1301、1302、1303)を含む磁気センサの出力部に結合された信号処理アセンブリ(104)を含み、包装材料の位置を合計信号から判定するように配置された検出機を含む。更に、包装材料を磁気マーキングによって検出する方法が開示される。  (もっと読む)
(もっと読む)
半導体装置の製造方法
【課題】 センサ素子におけるセンサの誤認識の発生を低減する。
【解決手段】 封止用樹脂18などの樹脂を印刷する際に、センサIC1のセンサ面1gとこれに対向する封止用マスク16の下面16aとの間に空洞17を形成した状態で、スキージ12によって封止用樹脂18を印刷することにより、印刷時の封止用マスク16とセンサIC1のセンサ面1gとの接触を避けることができ、これにより、印刷時にセンサIC1のセンサ面1gにダメージが与えられることを防止できるため、センサIC1におけるセンサの誤認識の発生を低減できる。
(もっと読む)
161 - 180 / 206
[ Back to top ]