
Fターム[2F063DD06]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 多数の検出器 (327)
Fターム[2F063DD06]の下位に属するFターム
2次元状に配列された検出器 (121)
Fターム[2F063DD06]に分類される特許
121 - 140 / 206
ガスホルダ、ガスホルダのシールゴム摩耗検知方法及び装置、及びガスホルダの改造方法及び装置
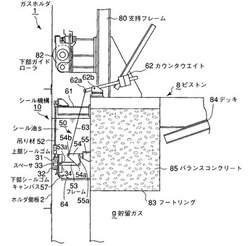
【課題】ホルダ側板を傷付けることのない摩耗量検知手段であって、かつ上下に複数段に配置されたシールゴムの摩耗量の平均値を精度良く検知できるとともに、シールゴムの摩耗量の遠隔監視を可能とする。
【解決手段】筒形をなすガスホルダ1の側板2とホルダ側板2に沿って上下に摺動するピストン8との間の機密を保持する上部シールゴム31及び下部シールゴム32の摩耗量を検知するガスホルダのシールゴム摩耗検知方法において、上下方向に間隔を置いて多段に設けられた前記シールゴム31及び32間の間隙に該シールゴムと同一の支持部材34に一体的に固定された非接触式の距離センサ58により、距離センサ58とホルダ側板2との距離を測ることによって、該シールゴムの摩耗量を検知する。
(もっと読む)
位置検出装置、これを用いた給紙装置および画像形成装置

【課題】画像形成装置の給紙トレイのように、位置検出面において均一の検知精度を必要としない場合において、位置検出装置の制御や製造が複雑化せず、かつ製造コスト増を伴わずに、必要に応じて高精度の位置検出を行うことができる技術を提供することである。
【解決手段】位置検出装置における位置検出領域には、ループコイル11が区域に応じて異なった配置間隔で並設されるセンサ基板10が備えられている。
(もっと読む)
歪ゲージ付き可撓性配線基板
【課題】測定対象物に埋め込み測定対象物の内部の変位を検出する場合に、深さ方向に、より多くの歪ゲージを配置し深さ方向の分解能を向上することである。
【解決手段】歪ゲージ付き可撓性配線基板10は、長手方向に延びる可撓性配線基板30の表面と裏面の対応する位置に、歪ゲージ20がそれぞれ対をなして複数対配置される。可撓性配線基板30は、積層構造を有し、中心側から外側に向かって、金属薄板32、保護層34、プラスチックフィルム36、パターン化された導電配線38が配置される。導電配線38は、全歪ゲージ20の全端子数と同じ数の配線がそれぞれ分離して設けられる。導電配線38の上に、歪ゲージ20が絶縁性フィルムの面を向けて配置される。歪ゲージ20の端子24と、対応する導電配線38とはリード線42で接続される。最も外側には保護膜40が設けられる。
(もっと読む)
位置検知センサ
【課題】外部から移動子の動きを簡単且つ確実に検出・確認できる。
【解決手段】油圧ポンプに傾斜可能なヨークに連動する移動部材14を設ける。移動部材の移動を検知するストロークセンサ15を設け、固定された抵抗体素子17とブラシ18からなる可変抵抗器16を有する。ブラシは移動部材14に固定し、移動部材と一体に移動して可変抵抗器16の出力電圧を変化させる。可変抵抗器16で検出した移動部材14の移動情報としての電圧はA/D変換器19でデジタル信号に変換し、発光ダイオード20で光電変換する。発光ダイオードは光信号をコントローラ21にパケット通信で送り移動情報を電気的に検出し表示する。光信号の光路には移動部材14に固定した半透過ミラー23を設け、光信号の一部を反射させて開口部24を通して外部から観察する。開口部24の近傍に目盛り25を設けて反射光の移動で移動部材の移動量を測定する。
(もっと読む)
流体圧シリンダ用位置検出装置
【課題】流体圧シリンダを決められた設置箇所に設置した状態では、流体圧シリンダに取り付けられた位置検出装置の取付け位置を手作業で調整不可能な場合であっても、位置検出装置から適正な検出信号を出力することが可能な状態に調整することができる流体圧シリンダ用位置検出装置を提供すること。
【解決手段】ワンチップマイコン42は、磁気センサSa〜Sdを順番に動作をさせて、磁気センサSa〜Sdがピストンの位置を検出できるか判定し、検出できた場合には、そのとき動作させた磁気センサSa〜Sdを動作させるように設定する。また、ワンチップマイコン42は、磁気センサSa〜Sdの動作範囲が重なっている場合も考慮して、ピストンの位置を動作範囲としているすべての磁気センサSa〜Sdを選択するようになっている。
(もっと読む)
路上等の水深測定器
【課題】 真上以外の位置や離れた位置からの識別を可能とする。
【解決手段】 基体10に脚部2を設けた本体部3に、前記脚部2の底面当接位置により定まる仮想路上面Xからの下端高さHを違える複数本の電極軸4と、該電極軸4の下端よりも下方に延在し、かつ前記電極軸4との間が路上面GL上の水Wにより導通する1本以上の導電軸5と、各電極軸4に接続されるパイロットランプ6と、前記導通する電極軸4に接続するパイロットランプ6のみを発光させる制御手段7とを設ける。
(もっと読む)
近接検出装置
【課題】近接を検出することが可能な検出可能距離を伸ばすと同時に、近接座標の位置分解能を高めることができる近接検出装置を得ることを目的とする。
【解決手段】遠い位置に存在する検知対象物を検知する場合、複数の検知電極を電気的に結合し、近い位置に存在する検知対象物を検知する場合、電気的に結合されている複数の検知電極を分離する検出電極結合回路5を設け、静電容量検出回路6が検出電極結合回路5により電気的に結合されている検知電極の静電容量を検出するとともに、検出電極結合回路5により分離された検知電極の静電容量を検出する。
(もっと読む)
構造物の状態検出装置とその状態検出システム及び埋設物
【課題】安価で簡単に構造物の状態を検出することができるとともにこの検出結果を確実に送信することができる構造物の状態検出装置とその状態検出システム及び埋設物を提供する。
【解決手段】検出装置3は、構造物Bの状態を埋設状態で検出する装置であり、構造物Bの鉄筋S1の状態を検出する。検出装置3は、構造物Bの歪みに応じて電気抵抗が変化する歪みゲージ3aを備えている。無線タグ4は、検出装置3の検出結果を埋設状態で送信する装置であり、電源となる電池などを備えておらず、リーダライタ装置側から供給される電力を電源として動作する。無線タグ4は、コンクリートC1の表面から鉄筋S1の表面までのかぶりコンクリート内に埋め込まれている。制御部4bは、歪みゲージ3aの抵抗値を測定してこの測定結果をアンテナ部4aからリーダライタ装置に送信する。
(もっと読む)
移動体システム
【構成】 移動体A,Bの移動経路に沿ってリニアセンサL1〜L4,R1〜R4を2列に間隔を置いて配置し、移動体A,Bに設けた磁石のリニアセンサに対する相対位置を求める。求めた相対位置にリニアセンサの原点座標を加算し、移動体の絶対位置を求める。
【効果】 移動体の絶対位置を地上側で迅速かつ高精度に検出できる。
(もっと読む)
貼付位置識別機能付歪ゲージおよび歪測定装置
【課題】折れ曲がった狭い箇所や高温雰囲気下でも自由に屈曲させてリード線を配設でき、かつ曲げ変形や衝撃荷重が作用したとしても折損することもなく、試験対象に貼付された歪ゲージ位置を識別する機能を有する簡便な貼付位置識別機能付歪ゲージおよび歪測定装置を提供する。
【解決手段】歪ゲージのゲージ面2a端部に印加電圧によって発光する発光体4を設けるとともに、前記歪ゲージのリード線2b,2cに沿ってこの発光体4に電圧を印加するための導線4b,4cを沿わせてなる貼付位置識別機能付歪ゲージ2。また、前記貼付位置識別機能付歪ゲージ2の発光体4に電圧を印加するための導線4bに、電源5と導通開閉手段6とを接続して発光体点灯回路を形成し、前記発光体4に前記電源電圧を印加または遮断する機能を付与した貼付位置識別機能付歪測定装置1。
(もっと読む)
エアバッグ開裂部の加工装置及び板厚測定装置並びに加工方法
【課題】樹脂表皮材における凹溝形成部分の板厚のばらつき状態を測定できるエアバッグ開裂部の加工装置および板厚測定装置並びに加工方法を得る。
【解決手段】台座部6およびカッター16に離間配置された複数対の導電部8、19により、各対毎の静電容量の測定が可能となるため、導電部8、19を配置した複数の部位において、インストルメントパネル1における凹溝2部分の板厚Dを測定することができる。したがって、凹溝2部分の板厚Dにばらつきが生じていても、そのばらつき状態を測定することができる。そのため、測定したばらつき状態を是正するように装置を調整することにより、ばらつきのない優れた板厚精度を有する凹溝2を加工することが容易である。
(もっと読む)
内視鏡挿入形状解析システム
【課題】内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能な内視鏡挿入形状解析システムを提供する。
【解決手段】本発明の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
(もっと読む)
検知体位置検出システム
【課題】 検知体を検出空間内に導入した後に、検知体を取り除くことなく、キャリブレーションを行うことができる検知体位置検出システムを提供する。
【解決手段】 位置検出用磁界を発生する磁界発生部3と、共振磁界を発生する共振回路21と共振回路21の経路を接続または切断する外部信号型スイッチとを有する検知体5と、外部信号型スイッチの接続または切断を制御するスイッチ制御部7と、位置検出用磁界および共振磁界の少なくとも一方の磁界強度を検出する位置検出用磁界検出部9と、位置検出用磁界検出部9の検出信号に基づき、検知体5の位置および向きを算出する位置算出部11と、が設けられたことを特徴とする。
(もっと読む)
リンク型変位計の測定方法およびリンク型変位計の測定装置
【課題】トンネルの築造やシ−ルドトンネルの拡幅に好適で、リンク型変位計ユニットを継ぎ足しながら、移動体の位置を合理的かつ迅速に計測する、リンク型変位計の新規な計測法を提供する。
【解決手段】変位センサ26,27を内蔵した一対のリンク22,23の一端部を互いに異軸方向に回動可能に連結したリンク型変位計ユニット21を設ける。前記変位計ユニット21を所定数連結して計測域に配置する。 前記各変位センサ26,27の信号を制御装置31に入力する。前記制御装置31を介して前記信号を演算処理するリンク型変位計の測定方法である。前記計測域を移動する移動体9にリンク型変位計ユニット21を同動可能に装着する。前記移動体9の移動位置に応じて、前記移動体9と計測基準位置との間に一または複数のリンク型変位計ユニット21を接続する。前記変位計ユニット21の変位センサ信号と計測基準位置を基に、移動体9の移動位置を演算する。
(もっと読む)
指紋認証装置
【課題】内部処理的な手法ではなく、構造的な手法によって指紋検出性能の向上を図る。
【解決手段】筐体12の表面13に、指先100の汚れを落とす第1の汚れ除去部14と、指先100に適度な湿気を供給する湿気供給部15と、指紋認証用のセンサ部16と、指先100に付着した油分を除去する第2の汚れ除去部17とが、指先100をスライドさせる方向X1の上流側から、この順番で配置されている。また、筐体12の表面13には、第1の汚れ除去部14、湿気供給部15、センサ部16、第2の汚れ除去部17を被覆する蓋部材が配置されており、さらに、この蓋部材の下面には、センサ部16の汚れを拭き取る拭き取り部材が設けられている。
(もっと読む)
雨水貯留槽及び雨水貯留槽における遮水シートの損傷位置検出方法
【課題】雨水貯留槽自体の建設コストの増加を抑制しつつ、遮水シートにおける損傷の有無及び位置を簡単に検出する。
【解決手段】遮水シート20を介して地中に埋設された雨水貯留槽10において、遮水シート20の外側に面電極38を設置するとともに、遮水シート20の内側に雨水を介して通電用電極134と複数の測定電極132とを設置し、通電用電極134と面電極132との間に交流電流を印加して、複数箇所で交流電流と測定電極132,132間の電位差との位相差を測定し、この位相差の変化を調べて遮水シート20の損傷位置を特定する。
(もっと読む)
等速自在継手のボール挙動計測装置
【課題】等速自在継手のボールの挙動を検出できて、ボールの剥離等による寿命を把握できる等速自在継手のボール挙動計測装置を提供する。
【解決手段】ボールポケットを有するボール支持体6をケージ16に周方向のスライドを可能として付設する。ボールのうちの一つを着磁ボール5aとする。着磁ボール5aをボールポケットに回転可能に支持させる。ボール支持体6に、着磁ボール5aの中心が原点となる3次元座標系のX,Y,Z軸のうちのX、Y軸方向のボール磁軸の変化を検出するX成分検出器50及びY成分検出器51を配置する。3次元座標系のZ軸方向の磁路を有する磁気回路75を構成して、ボール支持体6から離れた位置に、Z軸方向のボール磁軸の変化を測定するZ成分検出器52を配置する。
(もっと読む)
渦電流探傷法による表面欠陥長さ評価方法及び装置
【課題】本発明の目的は、スケールを用いた目視検査や浸透探傷に依らずに、渦電流探傷法で金属性の被検査体の表面欠陥の長さについて評価する方法を提供することにある。
【解決手段】渦電流探傷法で励磁コイル1と検出コイル2を白抜き試験体3上で矢印の方向へ走査し、各走査位置での出力電圧を検出コイル2の出力に基づいて渦電流探傷器で測定し、各走査位置での出力電圧の分布を示す出力電圧の分布曲線5の情報から、左側の最大値から左側へ下る差分電圧範囲Vp−pで12デシベルダウンの位置情報を抽出し、右側の最大値から右側へ下る差分電圧範囲Vp−pで12デシベルダウンの位置情報を抽出し、両位置情報の間の距離を計算して試験体3の表面欠陥であるスリット4の長さとして評価する。
(もっと読む)
鉄道車両の車輪とレールとの接触位置検知方法
【課題】車輪とレールとの接触位置を連続的に測定する。
【解決手段】板部1bの中央部に設けた輪重測定用孔1dの、同一円周上の内周対向位置に1組の輪重測定用歪みゲージ2a…を、板部1bのボス側の表裏に横圧測定用歪みゲージ3a…、3a’…をそれぞれ貼り付けたPQ車輪1の、横圧測定用歪みゲージ3a…、3a’…から半径方向外方に延長した線上の、板部1bのリム側のRしまい部近傍に接触位置検知用歪みゲージ4a…、4a’…をさらに貼り付ける。横圧測定用歪みゲージ3a…、3a’…、接触位置検知用歪みゲージ4a…、4a’…とそれぞれのブリッジ回路から計測された歪みと、輪重測定用歪みゲージ2a…とブリッジ回路から得られた輪重とから、車輪とレールとの接触位置を検知する。
【効果】走行中の車輪とレールとの接触位置を、高い検知精度で連続的に測定でき、脱線に対する安全性をより厳密に評価できる。
(もっと読む)
舵角を求める方法および装置
車体(6)に可回転に支承されたステアリングホイール(58)の舵角(δLRW)を求める方法であって、ジョイント(8)を間に挟んで車体(6)に接続されたホイール(14)はステアリングホイール(58)により車体(6)に対して旋回させることができ、または旋回させられ、車体(6)は舵角(δLRW)に応じたジョイント(8)の傾斜(ω)を検出する角度測定装置を有しており、ステアリングホイール(58)の車体(6)に対する捩れ角(δSTS)が舵角センサ(61)により求められる形式の方法において、ステアリングホイール(58)によって許容されうる舵角(δLRW)の範囲に対してステアリング方向ごとに複数のセクター(S)を割り当て、前記傾斜に基づいて前記セクター(S)のうちの1つを求め、前記捩れ角(δSTS)と求められたセクター(S)とに基づいて舵角(δLRW)を求める。  (もっと読む)
(もっと読む)
121 - 140 / 206
[ Back to top ]