
Fターム[2F063DD06]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 同一種類の検出器を用いるもの (1,165) | 多数の検出器 (327)
Fターム[2F063DD06]の下位に属するFターム
2次元状に配列された検出器 (121)
Fターム[2F063DD06]に分類される特許
141 - 160 / 206
容量センサー内蔵の自動車シートに着座した乗員の形態を決定する方法

【課題】いくつかの容量センサーを内蔵した自動車シートに着座した乗員の形態をより詳細に決定することができるように、容量センサーの前記構造を改良することにある。
【解決手段】シートに内蔵された複数の容量センサーからの出力を収集する工程と、各容量センサーに対して、前記センサーから標的物が離れている距離を示す第1の値、及び、前記標的物によって覆われた前記センサーの表面を示す第2の値を決定する工程と、前記標的物によって覆われた前記センサーの表面を示す前記第2の値に、前記センサーから前記標的物が離れている距離を示しかつ前記第2の値に対応する前記第1の値に基づいた各重み付けを、適用する工程と、重み付けされた第2の値の収集に基づいて前記標的物の形態を決定する工程とを含む。
(もっと読む)
回動デバイス位置検知システムおよび方法

【課題】大寸の単一の絶対位置センサを適用することなく、回動デバイスの絶対的位置を決定し得るシステムおよび方法を提供する。
【解決手段】モータの絶対的位置を決定するシステム。該システムは、第1および第2の多重磁極式磁気リング、第1および第2の処理ユニット、および、少なくとも一個の外部センサを含む。上記第1の多重磁極式磁気リングは、上記モータの回りに同心的に位置決めされると共に、複数の磁極対を有する。上記第2の多重磁極式磁気リングは、上記第1の多重磁極式磁気リングの回りに同心的に位置決めされると共に、少なくともひとつの磁極対を有する。上記第1処理ユニットは上記第1の多重磁極式磁気リングの近傍に位置決めされることで、上記第1の多重磁極式磁気リングの上記複数の磁極対の内のひとつの磁極対の全体に亙る角度的位置を決定する。上記センサは上記処理ユニットの外部にて上記第2の多重磁極式磁気リングの上方に位置決めされ、該第2の多重磁極式磁気リングの上記磁極対の状態を表す。上記第2処理ユニットは、上記角度的位置および上記状態に基づき、上記モータの絶対的位置を生成する。
(もっと読む)
計測装置
【課題】安価なタグによってゲージのリード線を測定面などに固定することが可能である計測装置を提供する。
【解決手段】歪ゲージ14側のタグ16と、計測機器12側のタグ17とに、対応する識別記号を記入して、共通のリード線15に取付けることで、歪ゲージ14の特定作業を確実に行なえるようにする。歪ゲージ14側のタグ16は、リード線15の一側面に貼付けてこのリード線15を測定面13に固定するように測定面13にも貼付ける。一方、計測機器12側のタグ17は、リード線15を挟んで二つ折りにするように相互に貼合せる。歪ゲージ14は、接着剤により測定面13に接着するが、その接着前に、歪ゲージ14側のタグ16によりリード線15を測定面13に固定することが、接着時の歪ゲージ14にリード線15の荷重をかけない上で好ましい。タグ16,17は、複数の色により色分けする。
(もっと読む)
磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置
【課題】本発明は、手指の繊細な動きを記録・再現するための磁気式位置姿勢センサを用いた手指用モーションキャプチャ装置を提供することを目的とする。
【解決手段】磁気式三次元位置姿勢システム(Liberty 16 system)は、1個のトランスミッタ(Transmitter)と16個のセンサ(sensors)で構成されており、トランスミッタに対するセンサの相対的な位置(X,Y,Z)および角度(Az,El,Ro)を計測することができる。それぞれのセンサは指に装着し易いようにモールドしており、1本の指に3個のセンサを装着できる。片手あたり手掌部の1個を加え計16個のセンサで手指のモーションキャプチャ(MoCap)を構成しており、あらゆる手の動きを計測することができる。また、トランスミッタと手掌部のセンサを固定するグローブは伸縮性のある面ファスナーを巻きつけて装着し、その他のセンサは伸縮性に富むテーピングを用いて装着する構造である。
(もっと読む)
膜厚測定装置
【課題】長尺帯状や長大な検査試料に対して簡単な構成で容易に且つ正確に膜厚を測定する。
【解決手段】ポリエステルフィルム11に導電性薄膜が形成された検査試料に対して当該導電性薄膜の膜厚を測定する膜厚測定装置である。ローラ検査部2に、前記ポリエステルフィルム11の表面に対して、設定された隙間を隔てた状態で支持される検査ヘッド10と、前記ポリエステルフィルム11の導電性薄膜と前記検査ヘッド10との間に介在した状態でローラ検査部2の外周に設けられると共に前記導電性薄膜に直接的に又は間接的に接触して当該導電性薄膜と前記検査ヘッド10との間隔を設定間隔に支持する隔離膜14とを備えて構成した。
(もっと読む)
円筒状基体上の塗膜の膜厚測定方法及び測定装置
【課題】円筒状基体上に設けられた塗膜又は被膜の厚みを測定する際に、測定によって前記基体にかかる負荷を少なくし、個々の測定値を極めて正確にする。
【解決手段】円筒状基体外表面の変位が測定可能な測定手段を用いて、前記円筒状基体外表面の軸に対して直交する前記円筒状基体外表面の断面円内に設定した基準点に対する前記断面円の円周上に定められた3つ以上の点の距離の前記円筒状基体の回転による変化に基づいて、前記基準点と前記円周上の点との距離を算出して前記円筒状基体外表面の断面円の形状、円中心、真円度、外径値を特定し、且つ、前記塗膜又は被膜外表面の変位が測定可能な測定手段を用いて、前記3つ以上の点とは別の、前記断面円と同一の断面上且つ前記塗膜又は被膜の外表面上の1つ以上の点と前記基準点との距離を算出し、前記円筒状基体外表面の断面円の形状をもとに前記塗膜又は被膜の厚みを測定する方法を提供する。
(もっと読む)
絶対操舵位置検出装置
【課題】簡易な構成で広い範囲の絶対操舵位置を検出する絶対操舵位置検出装置を提供する。
【解決手段】絶対操舵位置検出装置90において、第1レゾルバ18および第2レゾルバ20は、0°以上360°未満の範囲でステアリングホイール12の回転位置を検出する。モータレゾルバ30は、ステアリングホイール12の操舵を補助するモータ28の電気角を検出する。変位センサ60は、ステアリングホイール12の操舵方向を検出する。EPSECU100は、検出されたステアリングホイール12の回転位置と検出されたモータ28の電気角とによりステアリングホイール12の絶対操舵位置が確定できない範囲において、検出されたステアリングホイール12の回転位置、検出されたモータの電気角、および検出された操舵方向を利用してステアリングホイール12の絶対操舵位置を検出する。
(もっと読む)
電子機器
【課題】本発明は、接触型センサ内蔵半導体素子と配線基板との接続部が保護された半導体装置が組み込まれた電子機器を提供することを課題とする。
【解決手段】電子機器に接触型センサ内蔵半導体装置が内蔵される。接触型センサ内蔵半導体装置は、回路形成面に形成されたセンサ領域1bとセンサ領域1b以外の領域に設けられた接続用電極1cとを有する接触型センサ内蔵半導体素子1と、端面が回路形成面上に位置するように半導体素子1の接続用電極1cに接続された配線基板2と、配線基板2の端部から回路形成面までの部分を覆うように設けられた保護樹脂部7とを有する。センサ領域1bは筐体3から外部に露出している。
(もっと読む)
長さ測定システムを備えたリニアガイドユニット
ガイドレール(1)の上に縦移動可能に配置されたガイドキャリッジ(2)及びガイドレール(1)と平行に配置した実量器(4)と協動する測定ヘッド(3)を備えた長さ測定システムを有し、実量器(4)が実量器(4)を担持する中空体の中に配置されており、この中空体がガイドレール(1)に対して間隔を置いて配置され、その両端が支承されたリニアガイドユニット。 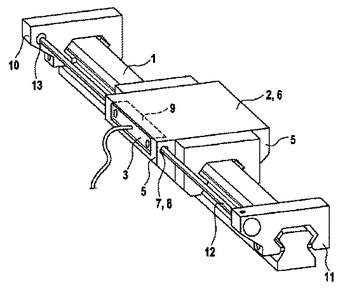 (もっと読む)
(もっと読む)
貫入型パイプひずみ計
【課題】 本願発明は、地盤の浅層に発生した地盤のひずみを計測するため、運搬が容易で様々な場所に、短時間、低コストかつ容易に設置出来る貫入型パイプひずみ計の技術を提供することを目的とする。
【解決手段】 複数のひずみゲージ27を外周面に取り付けた内パイプ12を外パイプ13に内蔵して一体化したパイプひずみ計本体11の先端部に掘削用スクリュー18を設け、ひずみ計本体11の後端部にひずみ計本体11を回動させる工具の取付部となる回動用工具取付部(スリット13a)を備え、回動用工具(20,21)を用いて地中の浅層に埋設する。
(もっと読む)
二重負荷経路とフェイルセーフ機構を有する多チャンネルRVDT
角度変位センサ。入力軸は、ハウジングによって支持されておりかつ主ギアに固定されている。複数の二次ギアは、主ギアの周りに配置されてそれに係合されている。複数の変位センサは、二次ギアと一体に結合されている。有利的には、主ギアには、剪断切欠部が形成されている。さらに、故障停止が起こったときに切り離しを可能にするように各二次ギアが角度変位センサの軸に結合されている。  (もっと読む)
(もっと読む)
回転角度検出装置および回転角度検出装置付き軸受
【課題】 高速かつ高精度の回転角度検出装置、およびその回転角度検出装置を備えた軸受を提供する。
【解決手段】 磁気発生手段に回転中心の軸方向に配置された複数のライン状の磁気センサアレイと、その出力をデジタル信号に変換するAD変換回路と、出力から磁界分布のゼロクロス位置を検出するゼロクロス位置検出手段と、ゼロクロス位置から磁気発生手段の回転角度を検出する角度計算手段とを備える。検出されたゼロクロス位置を記憶する検出位置記憶手段と、記憶されたゼロクロス位置を元に所定の基準で磁気センサアレイの次回のスキャン範囲を設定するスキャン範囲設定手段と、スキャン範囲設定手段で設定したスキャン範囲で磁気センサアレイ検出信号を読み出すスキャン回路とを設ける。スキャン範囲として限定された部分的な検出信号を用いてゼロクロス位置を検出し、この部分的な検出信号から検出されたゼロクロス位置から回転角度を検出する。
(もっと読む)
ハンドル軸の捩じれを特に測定するための、ストロークが短い磁気位置センサー
本発明は、ハンドル軸の捩じれを特に検出するため、軸方向を向いた複数の磁石を有する回転子構造(10)である第1の磁気構造と、径方向を向いた歯(25、26)が延びている同心の2つの環状部材(23、24)を有する固定子構造(20)である第2の構造とで構成された位置センサーにおいて、回転子構造(10)が、ほぼ円板の形状であり、前記複数の磁石を支持する強磁性ヨークによって構成されていることと、固定子構造(22、24)が、重なり合う歯を有することと、この位置センサーが回収構造(30)である第3の構造を備えていて、この回収構造は、2つの磁束閉じ込め部材(31、32)からなり、そのうちの少なくとも一方は固定されており、その2つの磁束閉じ込め部材が少なくとも1つのエアギャップ(40)を規定し、その中に少なくとも1つの磁気感受性素子(50)が配置されることを特徴とする位置センサーに関する。  (もっと読む)
(もっと読む)
高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システム
【課題】振幅に加え位相も計測対象として位置精度を向上させる高精度LC共振型磁気マーカの位置、方向および等価的磁気モーメントの検出システムを提供する。
【解決手段】励磁コイルと、この励磁コイルと対向する複数の検出コイルと、励磁コイルと検出コイルとの間に配置されるLC共振型磁気マーカと、励磁コイルはLC共振型磁気マーカの共振周波数に同調させた交流磁界を発生させ、LC共振型磁気マーカからの誘導磁界を複数の検出コイルの各検出コイルで計測する手段と、LC共振型磁気マーカをセットした状態での検出コイルによる第1の誘起電圧を計測する手段と、LC共振型磁気マーカをセットしない状態での検出コイルによる第2の誘起電圧を計測する手段と、第1の誘起電圧と第2の誘起電圧の位相差θを求める手段と、この位相差に基づいてLC共振型磁気マーカの寄与電圧を求める手段とを具備する。
(もっと読む)
超小型絶対位置センサを用いたハンドインターフェースグローブ及びこれを用いたハンドインターフェースシステム
【課題】超小型絶対位置センサを用いて指関節の絶対位置を測定した信号を用いて仮想空間の仮想ハンドモデルを制御し仮想空間の客体と相互作用できるようにして現実空間の使用者の手動きを精密で正確に仮想空間の仮想のハンドモデルの動きと自然に一致されるように現実空間と一致度の高い自然な手の動きおよび視覚的一致感を支援するグローブ及びこれを使用したシステムを提供する。
【解決手段】指関節の絶対位置を測定する超小型絶対位置センサを用いて指関節の微素変位を測定し、測定された指関節の動きを用いて仮想のハンドモデルの動きを制御し仮想環境の客体と相互作用して、使用者の体形の大きさによって異なる変化距離の補正を簡単な2つの動作にてできるようにして仮想の製品品評などの高品質の仮想現実技術に接し、実際と類似に製品の品評過程を模擬して製品の欠陥と誤謬を事前に検出でき、全体的に製品の生産過程及び設計過程を短縮させる効果がある。
(もっと読む)
回転角度検出装置
【課題】磁気感知素子による出力信号に基づき被検出回転体の回転角度を検出するにあたってその出力信号の振幅値やオフセット値にずれが生じた場合であれ、被検出回転体に対する検出精度をより好適に維持することのできる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、クランク軸300の回動に伴って回動する着磁ロータ200から発せられる磁気ベクトルMVの変化を90度だけ位相のずれた正弦波信号A、Bとして感知する3つのホール素子対111a〜111cを有している。これら3つのホール素子対111a〜111cは、各々傾けて配置されている。ここで、回転角度検出装置は、それらホール素子対111a〜111cの別に上記クランク軸300の回転角度θを「θ=tan−1(A/B)」の演算式に基づいて算出する。次いで、算出した3つの信号の位相関係を維持しつつそれらの平均値を演算する。
(もっと読む)
マルチレンジ間隙測定システム及びそれを動作させる方法
【課題】静止物体(44)と可動物体(42)との間の間隙を測定するためのシステム(12)を提供する。
【解決手段】本システム(12)は、静止物体(44)上に配置されるように構成されかつ可動物体(42)に対応する作動パラメータを測定するように構成された少なくとも1つのセンサ(58)と、少なくとも1つのセンサ(58)に結合されたコントローラ(64)とを含み、コントローラ(64)は、測定した作動パラメータに基づいてセンサ(58)の動作モードを制御するように構成される。
(もっと読む)
磁気マーカ検出装置
【課題】本発明は、効率的に故障認識を行うことができる磁気マーカ検出装置の提供を目的とする。
【解決手段】走行路11上に敷設された磁気マーカMの発する磁界を検出する磁気センサ3内に車両2の所定方向に並んで配列される複数の磁気検出部を備え、複数の磁気検出部のうち所定の磁界強度条件を満たす磁気検出部を含む領域の中心位置を車両2に対する磁気マーカMの位置と認識する磁気マーカ検出装置であって、前記領域の中心位置と前記領域のうち前記所定の磁界強度条件を満たす磁気検出部が途切れることなく連続する領域の中心位置とを比較し、両中心位置が異なる場合には故障した磁気検出部があると判定する、磁気マーカ検出装置。
(もっと読む)
非破壊検査装置および非破壊検査装置のコイルの設計方法
【課題】断熱材で保温等がなされている配管についても、非接触で配管の腐食部および肉厚が測定できる非破壊検査装置を提供する。
【解決手段】非破壊検査装置10は、断熱材22に覆われた配管21に対して、断熱材22を介して配管21の上に載置されるセンサ11と、センサ11を駆動する測定装置19とを含む。センサ11は、所定の距離離れた位置にある配管21の腐食部の寸法を測定可能であり、測定装置19はセンサ11からの出力を入力して配管21の腐食部の厚さを演算するパソコン18を含む。
(もっと読む)
少なくとも3つのひずみゲージを備える変形センサベアリング
本発明のベアリングは、回転時に引き起こされる固定レースの1つの領域の変形による擬似正弦波の振幅Aを判定するための判定システムであって、少なくとも3つのひずみゲージ(7)からなる少なくとも1つの判定システムと、各ゲージ(8)で生成された信号の時間的変動にそれぞれ依存した3つの信号Viを測定して、それぞれ同じ角度および同じ振幅を有する2つの信号SIN,COSを形成することができる測定デバイスと、領域(7)の変形の振幅Aを時間の関数として計算するための計算デバイスであって、式SIN2+COS2を計算することにより振幅Aを推定するように構成された計算デバイスとを備える。 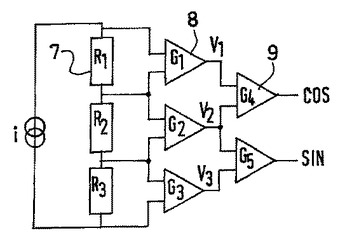 (もっと読む)
(もっと読む)
141 - 160 / 206
[ Back to top ]