
Fターム[2F063LA16]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 平均値算出 (48)
Fターム[2F063LA16]に分類される特許
21 - 40 / 48
2物体間の間隔を推定するシステムおよび方法
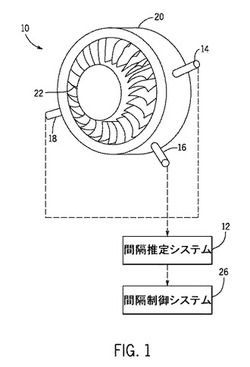
【課題】2物体間の間隔を推定するシステムおよび方法を提供すること。
【解決手段】回転機械(10)内の間隔推定用処理システム(12)は、1つまたは複数のセンサ(14、16、18)と、推定間隔(46)を算出する1つまたは複数のデジタル信号プロセッサ(32、40)とを備えている。処理システム(12)は、リアルタイム間隔推定値を得るための技術、および平均化した間隔推定値を得るための技術を含むことができる。処理システム(12)の態様はまた、回転機械(10)の動作状態によって、リアルタイム間隔推定値および平均化間隔推定値を切り換える方法を含むことができる。
(もっと読む)
シリンダ位置検出装置

【課題】 小型かつシンプルな構造を持つシリンダ位置検出装置の提供。
【解決手段】 ピストンロッドの表面においてストローク変位方向に沿って面積が漸増又は漸減する区間を有する所定のパターンで配置された磁気応答部と、磁気応答部に対応してシリンダ本体の側に固定され、1相の交流信号で励磁されるコイルと、該交流信号が印加されるインピーダンス手段と、コイル及びインピーダンス手段の電圧をそれぞれ取り出し、ピストンロッドのストローク位置に対して異なる振幅特性をそれぞれ示す複数の交流出力信号を生成するアナログ演算回路とを具備する。ピストンロッドの直線的ストローク位置の変位に応じて該コイルに対する該磁気応答部の対応面積が変化し、この対応面積変化に応じて該コイルのインダクタンスが変化し、該コイルに対する前記磁気応答部の対応面積が漸増又は漸減する区間に対応して該コイルの両端間電圧が漸増又は漸減する。
(もっと読む)
位置検出装置
【課題】簡単な構造で安価に検知領域の範囲に近接等する検知対象物の位置や距離を確実に検出し、設計自由度を向上させる。
【解決手段】位置検出装置100は、静電容量センサ部10および検出回路部20を備え、静電容量センサ部10は、第1および第2検知電極11,12と、これらの間に配置された誘電体19とからなる。誘電体19は、検知面19a上に検知領域の範囲Lを形成する。検出回路部20は、静電容量検知回路21,22と、A/D変換器23,24と、演算処理回路25とを備え、各静電容量検知回路21,22は演算処理回路25の制御により周期的に同期がとられて動作する。各検知電極11,12にて検知された静電容量の検出値C1,C2に基づき、演算処理回路25によって検知領域の範囲Lにおける検知対象物の位置を判定して検出する。
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 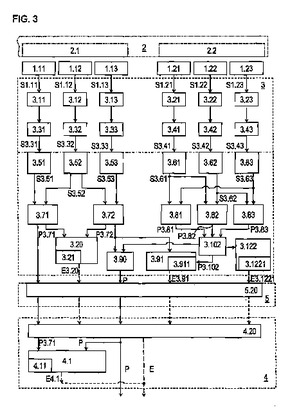 (もっと読む)
(もっと読む)
ALCパネルの主筋かぶり厚検査方法
【課題】ALCパネルの製造工程において、内部に埋設される主筋から両面までの主筋かぶり厚を、高速かつ安価に、過検出とならないように測定する方法を提供する。
【解決手段】渦電流式磁気センサ(7)を使用し、該センサ(7)を、水平方向に搬送されるALCパネル(1)の腹面から一定距離(L)を保持し、かつ、一定速度(v1)で、ALCパネル(1)の搬送方向に対して垂直方向に往復動させ、センサ(7)の出力値をアナログ出力させ、センサ(7)が主筋(2)の上を通過する際の測定信号のピーク値(vm)と、前記速度(v1)と、センサ(7)と主筋(2)との距離の関係式f(ピーク値、速度)を予め求めておき、主筋のかぶり厚(t)を、t=f(vm、v1)−Lにより算出し、得られたデータをピークカット処理ないしは移動平均処理することにより、補強鉄筋徒の交差の影響を排除して、ALCパネルの主筋かぶり厚を測定する。
(もっと読む)
膜厚・接触状態計測方法及び装置
【課題】流体潤滑状態では静電容量計測により潤滑油の油膜の膜厚を正確に計測し得且つ境界潤滑状態では電気抵抗計測によりシリンダライナに対するピストンリングの接触状態の評価を行い得る膜厚・接触状態計測方法及び装置を提供する。
【解決手段】膜厚・接触状態演算評価器13において、クランク回転角度検出器14からの計測トリガー信号14aが入力される一定クランク回転角度毎に、通常は切換指令信号13aにより切換器9を静電容量計測回路10側へ切り換えて静電容量計測回路10による計測値に基づき流体潤滑状態にある油膜の膜厚を求める一方、ピストンリング5がセンサ電極8の埋設箇所を通過中の膜厚が設定値以下になった場合、切換指令信号13aにより切換器9を電気抵抗計測回路11側へ切り換えて電気抵抗計測回路11による計測値に基づき境界潤滑状態にあるシリンダライナ3に対するピストンリング5の接触状態の評価を行うよう構成する。
(もっと読む)
近接検出装置および近接検出方法
【課題】 人の指などの物体の接近及び位置を電極の静電容量により検出する近接検出装置において、物体の接近していない時の検出電極の静電容量が大きく、接近による変化の比率が小さい場合でも、高速で高精度の安定した検出を行うことの出来る近接検出装置を提供する。
【解決手段】 検出電極の静電容量により発振周波数を変化させる発振手段からの発信信号の3から50サイクル程度の時間を、時間デジタル変換を用いて高分解能で検出して、その検出値を用いて接近や位置を近接演算で検出するようにした。
(もっと読む)
測長機能付ボールペン
【課題】筆記具としての機能を損うことなく、正確な測長が可能な測長機能付ボールペンを提供する。
【解決手段】着磁されたボール12を抱持するホルダ14の近傍にMI(磁気インピーダンス)素子を有する磁気センサ16,18を、その感磁方向がボール12とホルダ14による磁力線に直角になるように対向配置する。磁気センサ16,18の出力においてその増加パターンおよび減少パターンを検出することによってボール12の回転を検出する。
(もっと読む)
回転検出器
【課題】筆記具としての機能を損うことなく、正確な測長が可能な測長機能付ボールペンに使用して好適な回転検出器を提供する。
【解決手段】着磁されたボール12を抱持するホルダ14の近傍にMI(磁気インピーダンス)素子を有する磁気センサ16,18を、その感磁方向がボール12とホルダ14による磁力線に直角になるように対向配置する。磁気センサ16,18の出力においてその増加パターンおよび減少パターンを検出することによってボール12の回転を検出する。
(もっと読む)
回転角度検出装置
【課題】ステアリングシャフトの操舵角検出装置において、コスト増を招くことなく、高精度にギアの歯欠け異常を検出する。
【解決手段】ステアリングシャフトと一体のロータギアに対して増速側検出用ギアと減速側検出用ギアを連動して回転させ、両検出用ギアに付設したMRセンサ7a、7bからのサンプリングデータを増速機構側演算部60および減速機構側演算部70で演算処理してステアリングシャフトの増速角と減速角を算出する。故障診断部80では、増速角および減速角移動平均化処理部81、82で増速角と減速角のそれぞれ移動平均値を算出し、差分算出部84で各移動平均値の差分を算出して、変位量算出部86で求めたサンプリングごとの差分の変位量が基準値S0より大きいときに、異常検出部88が各ギアの連動系統のいずれかにギアの歯欠け異常がある旨の異常信号を出力するものとした。
(もっと読む)
実質的に不変な回転軸を検出するための方法および装置
【課題】以前の運動予測システムの欠点を解消し、かつ実質的に不変な回転軸を有する移動体の運動を処理するために特に適している方法を提案する。
【解決手段】3本の感知軸を有する少なくとも1つの慣性または磁気センサを備えている移動体の運動の実質的に不変な回転軸を検出するための方法は、前記センサの3本の感知軸に対する、異なる時間での少なくとも3つのサンプルを含む物理測定値を得るステップE10、E31と、物理測定値空間内で、実質的に不変な回転軸を予測するステップE11−E15、E32−E34と、前記予測された軸を、運動の実質的に不変な回転軸と同定するステップとを含む。実質的に不変な軸周りで回転する移動体の運動を予測するために特に使用される。
(もっと読む)
レゾルバシステムおよびこれを用いた電気式動力舵取装置
【課題】レゾルバによる回転角の検出精度を向上し得るレゾルバシステムおよび電気式動力舵取装置を提供する。
【解決手段】本電気式動力舵取装置のレゾルバシステムでは、CPU61は、振幅値計算部61aにより、第1レゾルバ等から出力される出力信号の振幅値A・sinθ+N,A・cosθ+Nを取得し、補正値出力部61cにより、回転トランスによる磁束が入力側検出コイルまたは出力側検出コイルに誘導して発生するノイズによる誤差分N(=N’)を振幅値計算部61aにより取得された振幅値A・sinθ+N,A・cosθ+Nに対して減算して補正する。そして、アークタンジェント計算部61fにより、ステータに対するロータの回転角度θを補正後の振幅値A・sinθ,A・cosθに基づいて算出する。
(もっと読む)
被駆動体の位置検出装置
【課題】被駆動体の位置を検出するための専用のデバイスを追加することなく、被駆動体の位置を検出することができる被駆動体の位置検出装置を提供する。
【解決手段】被駆動体8と、コイル11b,12bが巻かれた電磁石11,12と、被駆動体に一体に設けられ、電磁石と対向するアーマチュア13と、コイル11b,12bに駆動電流IACを供給することにより、アーマチュア13を作動させ、被駆動体を駆動する駆動回路16と、を有する駆動装置において、被駆動体の位置を検出する被駆動体の位置検出装置であって、コイル11bの電圧を検出する電圧検出手段21と、駆動電流IACを検出する駆動電流検出手段22と、検出された検出電圧SVおよび検出電流SIに基づいて、被駆動体の位置を検出する位置検出手段30,40,50と、を備える。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト103に取り付け、当該ステアリングシャフトの絶対角度を測定するための舵角センサ1であって、当該ステアリングシャフトと連動して可逆回転する主動ギア7と、主動ギアと連動して回転する微信号用ギア19の回転角度を検出する第1検出手段と、主動ギアと連動して回転する粗信号用ギア45gの回転角度を検出する第2検出手段と、を備え、当該第1検出手段は、検出した当該微信号用ギアの回転角度を示す微信号を出力するホール素子及び磁石を含めて構成してあり、当該第2検出手段は、検出した当該粗信号用ギアの回転角度を示す粗信号を出力するポテンショメータを含めて構成してある。そのため、なるべく少ない部品点数で、隣接する検出手段相互の磁束の影響を受けない、より高精度の舵角センサを提供することができる。
(もっと読む)
位置検出方法及び撮像装置
【課題】 MR素子から出力される正弦波信号の計測誤差を等しくし、正確な位置検出を行うことができる位置検出方法及びその位置検出方法を適用した撮像装置を提供する。
【解決手段】 MR素子から出力される、位相角が90度異なる正弦波信号を正弦波信号周期の2のべき乗分の1の所定のサンプリング周期でサンプリングし、そのサンプル値の最大値MAXDSA,MAXDSBと最小値MINDSA,MINDSBを用いて、2つの正弦波信号のオフセット値を示す初期化パラメータC,Dを算出する。
(もっと読む)
車両データを、とりわけホイールで走行する車両の速度を測定する装置
第1のセンサ(10)と第2のセンサ(20)を有するホイールで走行する車両の速度を測定するための測定装置。これら2つのセンサは同一のホイール(5)に取り付けられている。前記両センサとも、前記ホイール(5)の軸に対してそれぞれ垂直に作用し、互いに対してある角度をなす力を測定するように配置されている。さらに前記2つのセンサ(10,20)の測定値を受け取る評価装置(30)が設けられており、前記評価装置は前記両センサ(10,20)の測定値から前記ホイール(5)の車両走行方向における加速度を求める。  (もっと読む)
(もっと読む)
回転角度検出装置及びその初期設定方法
【課題】演算負荷を抑えつつ、主動歯車と従動歯車との間のバックラッシに起因する検出誤差を低減することができる回転角度検出装置及びその初期設定方法を提供する。
【解決手段】正方向誤差(回転角度α1,β1)を求める段階(S1−2〜S1−5)、逆方向誤差(回転角度α2,β2)を求める段階(S1−6〜S1−9)、正方向誤差と逆方向誤差との平均値(回転角度αave,βave)を求める段階(S1−11)、主動歯車14の回転角度が0°となる誤差を含まない理論的な第1及び第2の従動歯車15,16の回転角度α0,β0と前記平均値との差(オフセット値αofs,βofs)を求める段階、被検出物の回転角度θを求める際に、実際に検出された第1及び第2の従動歯車15,16の回転角度α,βに加算される補正データとしてオフセット値αofs,βofsを記憶する段階を経て、回転角度検出装置11の初期設定を行うようにした。
(もっと読む)
回転角検出装置
【課題】本発明は、高精度・高分解能な多回転角検知を行える装置の提供を目的とする。
【解決手段】入力軸に連結され、外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第1のターゲット5とを保持した多回転可能な第1の回転体3と、この第1のターゲット5に対向配置され、前記第1の回転体3の回転角を検出する第1の検出手段17と、前記入力軸に連結され歯車を持つ第2の回転体10と、この第2の回転体10の歯車に接続され、中心部に第2のターゲット12が配置された歯車を持つ第3の回転体11と、この第3の回転体11の回転角を検出する第2の検出手段13と、前記第3の回転体11の歯車に接続され、中心部に第3のターゲット15が配置された歯車を持つ第4の回転体14と、この第4の回転体14の回転角を検出する第3の検出手段16を備えることにより、多回転角検知を高分解能/高精度にできるという作用効果が得られる。
(もっと読む)
回転角度検出装置
【課題】磁気感知素子による出力信号に基づき被検出回転体の回転角度を検出するにあたってその出力信号の振幅値やオフセット値にずれが生じた場合であれ、被検出回転体に対する検出精度をより好適に維持することのできる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、クランク軸300の回動に伴って回動する着磁ロータ200から発せられる磁気ベクトルMVの変化を90度だけ位相のずれた正弦波信号A、Bとして感知する3つのホール素子対111a〜111cを有している。これら3つのホール素子対111a〜111cは、各々傾けて配置されている。ここで、回転角度検出装置は、それらホール素子対111a〜111cの別に上記クランク軸300の回転角度θを「θ=tan−1(A/B)」の演算式に基づいて算出する。次いで、算出した3つの信号の位相関係を維持しつつそれらの平均値を演算する。
(もっと読む)
磁気マーカ検出装置
【課題】本発明は、効率的に故障認識を行うことができる磁気マーカ検出装置の提供を目的とする。
【解決手段】走行路11上に敷設された磁気マーカMの発する磁界を検出する磁気センサ3内に車両2の所定方向に並んで配列される複数の磁気検出部を備え、複数の磁気検出部のうち所定の磁界強度条件を満たす磁気検出部を含む領域の中心位置を車両2に対する磁気マーカMの位置と認識する磁気マーカ検出装置であって、前記領域の中心位置と前記領域のうち前記所定の磁界強度条件を満たす磁気検出部が途切れることなく連続する領域の中心位置とを比較し、両中心位置が異なる場合には故障した磁気検出部があると判定する、磁気マーカ検出装置。
(もっと読む)
21 - 40 / 48
[ Back to top ]