
Fターム[2F063LA23]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 減算、差動 (163)
Fターム[2F063LA23]に分類される特許
101 - 120 / 163
センサ付き転がり軸受装置の製造方法
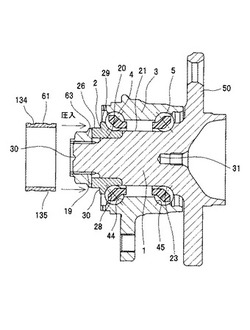
【課題】センサ付き転がり軸受装置の位置や、センサ付き転がり軸受装置に加わっているモーメント荷重の大きさを、精密に測定することができるセンサ付き転がり軸受装置を製造するセンサ付き転がり軸受装置の製造方法を提供すること。
【解決手段】内軸1、内輪2、外輪3、第1の玉4および第2の玉5を組み付ける。その後、内輪2の外周面の軸方向の一端部に、ターゲット部材61の軸方向の一端部を圧入すると共に、外輪3と内輪2との間のターゲット部材61側の開口を、シールド板7で密封する。この状態で、内軸1を、略内軸1の中心軸の回りに回転させた上で、ターゲット部材61の外周面を加工する。
(もっと読む)
センサ付き転がり軸受装置

【課題】車輪のモーメント荷重や軸方向の並進荷重を求めることが可能なセンサ装置を備え、上記センサ装置と独立のABSセンサを設置しなくても、回転軌道部材の回転速度を検出することができるセンサ付き転がり軸受装置を提供すること。
【解決手段】ターゲット部材73の外周面で構成される被変位検出部の一部に、軸方向に延在する溝155を有する環状部150を形成する。
(もっと読む)
レール高さ検出方法、レール高さ検出機構およびレール高さ変位量測定装置
【課題】
差動コイルを用いた電磁式の検出器を利用して検出器からのレール高さを特性グラフを参照して処理をすることで測定するレール高さ検出方法およびレール高さ検出機構を提供することにある。
【解決手段】
この発明は、隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルを有しレールの頭部の上部に対応させて軌道検測車に設けられた電磁センサから第1、第2の空芯コイルのそれぞれの検出信号を得て第1、第2の空芯コイルの検出信号の和信号と差信号との比に基づいて電磁センサのレールに対する走行方向に直交する方向のずれ量を得て第1、第2の空芯コイルの検出信号の和信号と電磁センサのレールに対する高さとの関係を示す特性グラフを参照してずれ量に対応する特性グラフに基づいて電磁センサのレールに対する高さを得るものである。
(もっと読む)
回転角度検出装置
【課題】大型化を抑制しつつ検出範囲を拡大することができる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、主動歯車13に噛み合う歯数の異なる第1〜第3の従動歯車14〜16の回転角度を求める。次に、第1及び第2の従動歯車14,15の回転角度に基づき主動歯車13の第1の暫定回転角度を求めるとともに、第2及び第3の従動歯車15,16の回転角度に基づき主動歯車13の第2の暫定回転角度を求める。次に、主動歯車13が第1の暫定回転角度の検出範囲だけ回転した際に第1〜第3の磁気センサ21〜23の検出範囲だけ回転する第1の仮想従動歯車G1、及び主動歯車13が第2の暫定回転角度の検出範囲だけ回転した際に第1〜第3の磁気センサ21〜23の検出範囲だけ回転する第2の仮想従動歯車G2を設定する。そして、第1及び第2の仮想従動歯車G1,G2の回転角度に基づき主動歯車13の回転角度θを求める。
(もっと読む)
回転軸の絶対回転角検出装置
【課題】二つ以上の相対角センサの検出信号を利用し、簡単かつ高精度に回転軸の絶対回転角を検出する。
【解決手段】回転軸12の二つの相対角センサ20P、20Q及び電動モータ22の相対角センサ24から得られる電気角信号Sp、Sq、Srに基づき、角度信号平滑化手段32において、絶対回転角信号Abを求める。この際、角度信号平滑化手段32で得られる絶対回転角信号の所望の周期的変動数Sと、減速機26の減速比a:bと、二つの相対角センサ20P、20Qの軸倍角p、qと、電動モータ22の相対角センサ24の軸倍角rと、回転軸12の許容回転数Nとが、各相対角センサの軸倍角の如何に関わらず、S=|(p+q)×N−r×N×(a/b)|=1の関係を満たすように各値を設定することで、絶対回転角信号Abは回転軸12の絶対回転角と一対一の対応となる。
(もっと読む)
磁性体の検知方法
【課題】被探知磁性体のピーク磁界強度が磁気センサの検出可能な上限磁界強度を越える場合でも、その磁性体の位置の探知を可能とする。
【解決手段】2個の磁気センサを所定の間隔を隔て所定の同一方向にて配設した対磁気センサを使用し、この対磁気センサまたは磁性体を前記所定の方向に走行させて両磁気センサの検出出力が実質的に等しくなる位置を探知する。
(もっと読む)
2電極型静電容量センサ、車両用乗員検出装置及び車両用乗員保護システム
【課題】2電極型静電容量センサ、車両用乗員検出装置及び車両用乗員保護システムの検出感度を向上させること。
【解決手段】2電極型静電容量センサの両電極11、12のずれをなくすことにより、検出感度が改善された。
(もっと読む)
位置検出回路及びその応用装置
【課題】 個体ばらつきと磁界変化検出素子の温度特性による位置検出の誤差の影響を容易に抑制でき、検出精度を向上させた位置検出回路及びその応用装置を提供する。
【解決手段】 離散して配置される一対のホール素子2a,2bと、前記一対のホール素子からの各出力に、ゲインを掛けて出力する2つのVCA(ゲイン調節器)3a,3bと、前記VCAからの各出力の差を求め、位置信号ΔVとして出力する減算増幅器4と、前記VCAからの各出力の加算値を求める加算増幅器5と、前記加算増幅器の出力が一定になるように、前記VCAのゲインを調節する設定回路6とを備えて位置検出回路を構成する。
(もっと読む)
位置検出回路及び撮像装置
【課題】 磁界変化検出素子の温度特性が補正され、高い精度で位置検出を行うことができる位置検出回路、及びそれを用いた撮像装置を提供する。
【解決手段】 所定の間隔をもって配列された複数のホール素子101a,101bと、入力電流に応じた磁界を発生する磁界発生手段106 と、前記複数のホール素子からの各出力を減算する減算増幅手段102 とを有し、前記減算増幅手段の減算結果に基づき前記複数のホール素子と前記磁界発生手段との相対的な位置関係を検出する位置検出回路において、前記複数のホール素子からの各出力を加算する加算増幅手段103 と、基準電圧104bと前記加算増幅手段の加算結果との差分を抑える制御値を生成する制御値生成手段104 と、前記制御値生成手段の制御値を電流に変換し、前記磁界発生手段の入力電流として出力するV−I変換手段105 とを備えて構成する。
(もっと読む)
基板検査システムに用いられるリニアスケールプローブ
【課題】周知な超小型バネ荷重型LVDTは、プローブと検出器を対で用いるため、多数の実装部品の検査に好適せず、比較的低価格帯の電子部品を用いて高周波励磁用電力で駆動しても正確な動作が期待できない。
【解決手段】本発明は、基板上に実装された複数の電子部品の検出部に用いられ、母線方向に延び、前記磁性体が移動する距離範囲内をカバーする長さと高周波の印加により筐体に発生するうず電流の電流通路が遮断できる幅を有する少なくとも1つのスリットが形成される筐体内を移動可能で一端が外部に延出し、他端に磁性体が設けられた可動軸と、磁性体と対向する位置に高周波励磁用電力が印加され電界を発する一次コイルと、電界中の前記磁性体の移動により発生する誘導電流を取り込む2分割された二次コイルとを備え、基板検査システムに用いられるリニアスケールプローブである。
(もっと読む)
焼き入れ深さ測定装置および焼き入れ深さ測定方法
【課題】測定対象物の温度が変動しても精度良く測定対象物の焼き入れ深さを測定することが可能な焼き入れ深さ測定装置および焼き入れ深さ測定方法を提供する。
【解決手段】複数の異なる周波数の交流励磁信号が印加されることにより測定対象物2に複数の異なる周波数に対応する浸透深さを有する誘導電流(渦電流)を発生させる励磁コイル11と、測定対象物2に発生する誘導電流に起因する検出信号を検出する検出コイル21と、複数の異なる周波数の交流励磁信号とこれに対応する検出信号との位相差φを算出し、浸透深さに対応する測定対象物2の表面からの深さと位相差φとの関係を求め、位相差φの上端値φUと下端値φLとの差分値Δφ(=φU−φL)に基づいて測定対象物2の焼き入れ深さを算出する制御装置30と、を焼き入れ深さ測定装置1に具備した。
(もっと読む)
シリンダ位置センサおよびそれを組み込むシリンダ
シリンダ位置センサおよびそれを備えるシリンダ。少なくとも1つの磁石がシリンダの構成要素に連結される。センサ要素が磁石からの磁束に応答して出力を提供する。センサ要素の出力がシリンダバレルに対するピストンおよびピストンロッドの位置と共に変化する。  (もっと読む)
(もっと読む)
車輪用転がり軸受装置
【課題】温度ドリフトの発生を防止して、センサの信頼性をさらに高めることができる車輪用転がり軸受装置を提供する。
【解決手段】車体側に固定される筒状の固定軌道輪1と、この固定軌道輪1の内部に回転自在に挿通される回転軌道輪2、3と、これらの軌道輪の間に転動自在に配設される複列の転動体5とを備えた車輪用転がり軸受装置H。前記回転軌道輪2、3の車両インナ側端部の外周面とのギャップを検出する複数の変位センサ24を周方向に有する円環状のセンサハウジング16の車両アウタ側端部が、前記固定軌道輪1の車両インナ側端部内周面に圧入されており、且つ前記変位センサ24が合成樹脂又はゴム系材料で被覆されて前記センサハウジング16と一体化されている。
(もっと読む)
人体接近検出装置
【課題】車両用ドアハンドルに水滴が付着した場合であっても誤動作が生じるのを防止することができ、安価に構成可能で複雑な前処理が不要な人体接近検出装置を提供する。
【解決手段】人体接近検出装置1は、車両用ドアハンドル3を構成するハウジング4内のドア2側の壁面4aと反対側の壁面4bの内側に設けられたセンサ電極11と、この壁面4bをドア2側の壁面4aに連結する壁面4c,4dの内側に設けられた参照電極12a,12bと、センサ電極11の静電容量を検知する検知回路21と、参照電極12a,12bの静電容量を検知する検知回路22と、検知回路21,22からの出力を平滑化するLPF23,24と、LPF24からの出力を係数倍する乗算器26と、LPF23および乗算器26からの出力を加算する加算器25と、加算器25からの出力を基準電圧と比較するコンパレータ27とを備える。
(もっと読む)
磁気式位置検出装置
【課題】磁気式位置検出に関係する各種部品の部品点数を一層少なく抑えることができる磁気式位置検出装置を提供する。
【解決手段】セレクトレバー装置には、セレクトレバーの操作レンジを検出するレバー位置検出装置5が設けられる。このレバー位置検出装置5の構成としては、装置本体にバイアスマグネット6,7とそれと組を成す磁気抵抗センサ9,10とを設け、セレクトレバーにカウンタマグネット8を設ける。セレクトレバーが操作されるとカウンタマグネット8もそれに伴って移動することから、磁気抵抗センサ9,10に付与される磁界方向beが変わり、磁気抵抗センサ9,10の出力が変化する。セレクトレバーのレンジ位置検出に際しては、これら2つの磁気抵抗センサ9,10から得られる2つの検出信号と、これら検出信号の出力差分とを用いて行う。
(もっと読む)
多芯ケーブル長測定装置
【課題】多芯ケーブルのケーブル長を測定でき、測定不可のときにはその原因を短時間で判別する。
【解決手段】LANケーブル1の一の絶縁線2の近端にパルス信号S1(信号S1)を注入するパルス信号生成部13と、一の絶縁線2の近端での信号S1およびその反射信号Sr(信号Sr)を検出する信号検出部17と、信号S1の検出から信号Srの検出までの経過時間に基づいてLANケーブル1の長さを測定する処理部20と、一の絶縁線2の近端にステップ信号S3(信号S3)を注入するステップ信号生成部14と、遠端で抵抗32を介して一の絶縁線2と接続された他の絶縁線2の近端に伝達する信号S3の電圧を測定する電圧測定部19とを備え、処理部20は、信号S3の注入から第1、第2の時間を経過した時点での信号S3の各電圧の電圧差が基準電圧未満のときにLANケーブル1が下限値未満の長さであると判別する。
(もっと読む)
位置検出システム、位置検出システムを用いた光学系と撮像装置
【課題】複数の磁気式の位置検出装置を近接して配置しても、磁場の位置検出精度への相互干渉を抑えることができ、高精度かつ小型である位置検出システムを提供する事にある。
【解決手段】各位置検出装置の磁石の着磁方向ベクトルが同一平面上になく、かつ着磁方向ベクトルが直交化方向成分を有する様に磁石を配置し、動く磁石の着磁方向ベクトルの移動方向が他方の磁石の着磁方向ベクトルの対称面に含まれる様にする。同時に磁気センサが他方の着磁方向ベクトルの直交成分を検出できるようにする事が好ましい。
(もっと読む)
角度及び変位センサ
【課題】回転中心周りに回転する部位の角度変化の測定にはロータリーエンコーダ等が適用可能であるが、身体の関節部のように、回転中心が不明な場合や、回転に伴って回転中心が移動する部位の角度変化を測定することとは困難であった。
【解決手段】柔軟な弾性体10の両面を圧電フイルム1A、1Bで挟んだ歪検出素子200を、柔軟な材質の張力伝達部材30の一方の端部付近の中立軸に配設し、該張力伝達部材30と歪検出素子200の一部を重ねて拘束して歪検出素子200の曲げ変形を拘束する部分を形成する。張力伝達部材30の他の端部には該部材に張力を与える手段を取り付けて構成し、張力伝達部材30に外力が加わって生じた曲がり角度を歪検出センサー200の電気出力として検出することを特徴とする。
(もっと読む)
位置検出装置、位置検出装置を有する光学系と撮像装置
【課題】従来と同等の高精度の位置検出機能を維持しつつ、従来よりも磁束検出手段と磁石の間の距離を縮めることが可能で、小型化、薄型化に適した位置検出装置を提供する事にある。
【解決手段】磁束の変化に対応して位置の変化を検出する磁石と複数の磁束検出手段よりなる位置検出装置において、磁石は磁束検出手段の少なくとも二つを結ぶ線を磁石の磁壁面上に含み、磁石の移動方向は磁壁面上にあるようにする。
(もっと読む)
静電容量センサ
【課題】外乱に影響されず正確な被検知物体と検知電極との距離を検出する。
【解決手段】静電容量センサは、検知電極1を備えて構成されており、被検知物体2の近接によって変化する検知電極1の対接地静電容量Cxを検出値として出力する。静電容量センサは、検知電極1が接続された信号線等に初期静電容量C0を有しており、検出値として出力される合成静電容量Cは検知電極1と被検知物体2との間の静電容量Cxと初期静電容量C0の和となる。予め既知又は算出可能である少なくとも2点の距離において、静電容量Cxと初期静電容量C0の和である合成静電容量Cを計測すれば、この2点での合成静電容量Cの差分から、検知電極1と被検知物体2との距離Lを計測することができる。
(もっと読む)
101 - 120 / 163
[ Back to top ]