
Fターム[2F063LA23]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 減算、差動 (163)
Fターム[2F063LA23]に分類される特許
121 - 140 / 163
位置検出方法及び撮像装置

【課題】 MR素子から出力される正弦波信号の計測誤差を等しくし、正確な位置検出を行うことができる位置検出方法及びその位置検出方法を適用した撮像装置を提供する。
【解決手段】 MR素子から出力される、位相角が90度異なる正弦波信号を正弦波信号周期の2のべき乗分の1の所定のサンプリング周期でサンプリングし、そのサンプル値の最大値MAXDSA,MAXDSBと最小値MINDSA,MINDSBを用いて、2つの正弦波信号のオフセット値を示す初期化パラメータC,Dを算出する。
(もっと読む)
回転角度検出装置

【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、AMR素子の端子間の短絡を検出し、誤判定がなく確実な検出が可能なものを提供することを目的とする。
【解決手段】AMR素子7や8のグランド端子12B等を、抵抗18を介してグランドに接続すると共に、この抵抗18に並列に設けたスイッチング手段19を制御手段17に接続することによって、制御手段17がスイッチング手段19を切換え、AMR素子7や8からの出力信号によって回転体1の回転角度を検出すると共に、これらの出力信号の違いによって、AMR素子7や8の出力端子間の短絡を検出できるため、誤判定がなく確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、AMR素子の端子間の短絡を検出し、誤判定がなく確実な検出が可能なものを提供することを目的とする。
【解決手段】AMR素子7や8の−出力端子11Cや+出力端子12Dを、整流素子18とスイッチング手段19を介して制御手段17に接続することによって、スイッチング手段19を切換えて、制御手段17がAMR素子7や8の出力信号から回転体1の回転角度を検出すると共に、増幅手段13からの出力電圧の違いによって、AMR素子7や8の隣り合った出力端子間の短絡を検出できるため、誤判定がなく確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
円筒状基体上の塗膜の膜厚測定方法及び測定装置
【課題】円筒状基体上に設けられた塗膜又は被膜の厚みを測定する際に、測定によって前記基体にかかる負荷を少なくし、個々の測定値を極めて正確にする。
【解決手段】円筒状基体外表面の変位が測定可能な測定手段を用いて、前記円筒状基体外表面の軸に対して直交する前記円筒状基体外表面の断面円内に設定した基準点に対する前記断面円の円周上に定められた3つ以上の点の距離の前記円筒状基体の回転による変化に基づいて、前記基準点と前記円周上の点との距離を算出して前記円筒状基体外表面の断面円の形状、円中心、真円度、外径値を特定し、且つ、前記塗膜又は被膜外表面の変位が測定可能な測定手段を用いて、前記3つ以上の点とは別の、前記断面円と同一の断面上且つ前記塗膜又は被膜の外表面上の1つ以上の点と前記基準点との距離を算出し、前記円筒状基体外表面の断面円の形状をもとに前記塗膜又は被膜の厚みを測定する方法を提供する。
(もっと読む)
旧ゴムゲージ測定機
【課題】測定値のバラツキを少なくすることで、測定精度を向上させた。
【解決手段】旧ゴムゲージ測定機1は、スチールベルト層31のベルト外周面Lcまでの第1測定距離D1を測定する渦電流センサー21と、渦電流センサー21に接して固定され、バフタイヤ30の外周面までの第2測定距離D2を測定するレーザー変位センサーとを備えている。渦電流センサー21の検出コイル21a及びレーザー変位センサー22の検出端22aは、固定された回転軸を中心に回転するバフタイヤ30の外周面Laより一定距離をもって固定されている。両センサー21、22のセンサー間距離D3は一定であり、第1測定距離D1とセンサー間距離D3の和から第2測定距離D2を減じることで旧ゴムゲージGが算出される。
(もっと読む)
回転角検出装置
【課題】本発明は、高精度・高分解能な多回転角検知を行える装置の提供を目的とする。
【解決手段】入力軸に連結され、外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第1のターゲット5とを保持した多回転可能な第1の回転体3と、この第1のターゲット5に対向配置され、前記第1の回転体3の回転角を検出する第1の検出手段17と、前記入力軸に連結され歯車を持つ第2の回転体10と、この第2の回転体10の歯車に接続され、中心部に第2のターゲット12が配置された歯車を持つ第3の回転体11と、この第3の回転体11の回転角を検出する第2の検出手段13と、前記第3の回転体11の歯車に接続され、中心部に第3のターゲット15が配置された歯車を持つ第4の回転体14と、この第4の回転体14の回転角を検出する第3の検出手段16を備えることにより、多回転角検知を高分解能/高精度にできるという作用効果が得られる。
(もっと読む)
反転磁界システムでの金属不感受性
【課題】目標物の追跡方法および追跡システムを提供する。
【解決手段】目標物を追跡する方法は、位置を示す磁界を送信するための送信器を目標物に固定する過程と、目標物によって引き起こされた位置を示す磁界のひずみのマップを提供する過程と、を含む。目標物から送信された歪んだ磁界が検出される。歪んだ磁界は、目標物によって引き起こされた歪にさらされた位置を示す磁界を含んでいる。検出された歪んだ磁界に基づく目標物の推定された座標が、求められる。推定された座標およびマップが、補正された座標を計算するために用いられる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、安価なものを提供することを目的とする。
【解決手段】回転体1及び第二の検出体4と連動して回転する補助検出体6を設けることによって、第一の検出体2と第二の検出体4、補助検出体6の三つの検出体が常に連動して回転するため、各検出体の歯車部に多少の欠けや破損が生じた場合でも、回転体1即ちステアリングの回転角度の正確な検出が可能となり、簡易な構成で、安価な回転角度検出装置を得ることができる。
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度を検出するのに際して、暗電流を必要とすることなく検出可能な回転角度の範囲を広げることが可能な回転角度検出装置を提供すること。
【解決手段】ステアリングシャフト1と一体的に回転されるとともにn個の歯を有するメインギヤ10には、m個の歯を有する第1の検知ギヤ11と、L個の歯を有する第2の検知ギヤ12とがそれぞれ噛合されている。そして、マイコンは、1周期中の第1の検知ギヤ11の回転角度αと、1周期中の第2の検知ギヤ12の回転角度βとを用いてステアリングシャフト1の回転角度θを算出する。
(もっと読む)
少なくとも3つのひずみゲージを備える変形センサベアリング
本発明のベアリングは、回転時に引き起こされる固定レースの1つの領域の変形による擬似正弦波の振幅Aを判定するための判定システムであって、少なくとも3つのひずみゲージ(7)からなる少なくとも1つの判定システムと、各ゲージ(8)で生成された信号の時間的変動にそれぞれ依存した3つの信号Viを測定して、それぞれ同じ角度および同じ振幅を有する2つの信号SIN,COSを形成することができる測定デバイスと、領域(7)の変形の振幅Aを時間の関数として計算するための計算デバイスであって、式SIN2+COS2を計算することにより振幅Aを推定するように構成された計算デバイスとを備える。 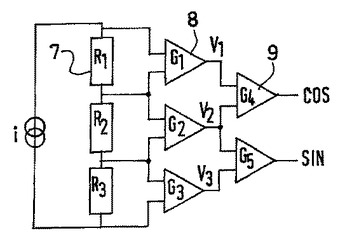 (もっと読む)
(もっと読む)
変位方向検出装置
【課題】粘弾性部材を用いて、移動部材20が固定部材11、12に対して少なくとも直交2軸方向へ相対変位する場合に、移動部材20の相対変位方向を検出することができる変位方向検出装置を提供する。
【解決手段】上側固定部材11と移動部材20との間に第1粘弾性部材31を配置し、下側固定部材12と移動部材20との間に第2粘弾性部材32を配置する。そして、第1粘弾性部材31のインピーダンスZ1と第2粘弾性部材32のインピーダンスZ2との差に基づき、移動部材20が上下方向へ変位したのか、それとも、左右方向へ変位したのかを判断する。
(もっと読む)
シリンダ位置検出装置
【課題】小型かつシンプルな構造を持つシリンダ位置検出装置の提供。
【解決手段】検出部は、コイル部及びこのコイル部に対して相対的に変位可能に非接触的に配置される磁気応答部材を含み、該磁気応答部材の該コイル部に対する相対的位置に応じた検出信号を前記コイル部から出力する。前記シリンダ本体とピストン部の一方に該コイル部が配設され、他方に該磁気応答部材が配設されてなる。コイル部は、所定の交流信号によって定電圧駆動されるコイルを含み、該コイルへの磁気応答部材の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測し、これに基づき前記ピストン部の位置検出データを得る。
(もっと読む)
特に安全システムを実施するための検出システム
本発明は、保護系統を実現する検出装置に関し、モータ駆動の傷害に関する系統を制御された様式で動作させる。本発明の目的は傷害に関する状況、危険に関する領域に肢が存在することの検出に関して利点を生じる解決策を提供することである。この目的のため、第1の態様によれば保護系統を実現する検出系統が提供され、モータ駆動の、傷害に関連する系統を保護された様式で動作させ、検出系統は観察領域における対象物、特に生物の存在を検出する受信装置を備える。検出装置は変調された電界の作用によって引き起こされた受信された事象を記録する検出要素を備える。系統は、変調された電界を放出する放出要素を有する結合装置を特徴とし、受信装置及び送信装置は、一部が受信要素と放出要素との間に位置する観察領域の伝送挙動に基づき観察領域において対象物、特に生物の存在が検出されるように構成される。  (もっと読む)
(もっと読む)
差動ノイズ・キャンセル機能付電子式指紋感知装置
像感知装置は、対象物、例えば指、の予想運動方向に関してほぼ直角に配置される像ピックアップ・プレートと、像ピックアップ・プレートに対して離隔配置された多数の像駆動プレートと、イメージピックアップ・プレートに対して実質的にほぼ平行に配置された基準プレートとを有し、前記複数の像駆動プレートは、各像駆動プレートと像ビックアップ・プレート間にセンサー・ギャップを画定するように、像ピックアップ・プレートから離隔配置されている。基準プレートは、共通モード・ノイズと結合が打ち消されるように像ピックアップ・プレートから隔てられていて、且つ像ピックアップ・プレートと基準プレート間に差動像信号が作りだされるように像駆動プレートから隔てられている。像ピックアップ・プレートに接続された差動増幅器と基準プレートとにより、ノイズが打ち消される。前記装置は更に、基準プレートから隔てられ、且つ例えば接地電位のような基準電位に連結された、櫛状プレートを有している。 (もっと読む)
クッキング装置および食品識別が行われる方法
食品識別が行われる第1および第2のプレートを有しているクッキング装置。位置決め機構が第2のプレートを第1のプレートの方に動かす。検出器が第1のプレート上に配置されている食品と第2のプレートが接触したことを検出しかつ信号を供給する。コントローラはこの信号を使用して、第2のプレートの移動距離を測定する。食品の厚さは移動距離の関数である。これは当該食品に対する調理過程を選択するために使用される。それからコントローラは選択された調理過程を実行し、食品が調理されるようにする。検出器はマイクロスイッチ、近接センサ、タッチセンサ、歪みセンサ、熱センサ、光学式センサ、ソナーセンサまたは負荷変化の位置決めセンサを含んでいることができる。 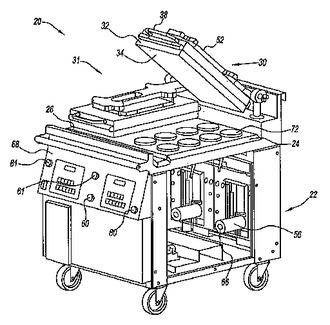 (もっと読む)
(もっと読む)
二進数列の判別によるステアリングホイールの絶対角度位置の判定
本発明は、自動車両のステアリングホイール(2)の、車両のシャーシに対する絶対角度位置θを判定する方法に関する。本方法は、検出した二進数列が非反復的かを判定し、肯定である場合には、二進数列があるセクタにおいて非反復的である場合、エンコーダ(1)の絶対角度位置を判別すること、および前記非反復二進シーケンスに対応するステアリングホイール(2)の絶対角度位置θ2を判別することが、推定値によって可能となるかを検査し、否定であれば、前記二進数列に対応するステアリングホイールの絶対角度位置θ3を判別することが、推定値によって可能となるかを検査する。  (もっと読む)
(もっと読む)
車用静電センサー
【構成】多様な形態の電極(12)を使用した乗員センサーシステムが開示されている。電極(12)はエアバッグ噴出口(44)に隣接して設置でき、それぞれの電極は乗員の近接度に対応する信号を提供する。このシステムは1信号の場合よりも適切な決定を下すことができるように複数の信号を比較するコンパレータをさらに含んでいる。電極(12)を誘電基材(16)上に形成し、電極間をブロックするように提供された接地領域(14)で分離することができる。電極(12)を、片面に導電コーティングを施した誘電材料に取り付けられた導電材料で形成することができる。電極(12)を内装体内に接地導電材料と隣接させて埋設し、1電極にDC電圧を印加して第2電極への導電通路を形成することができる。その導電通路は湿気で提供される。ドライブ電極(22)とレシーブ電極(26)は車の窓と一体的に形成することができる。 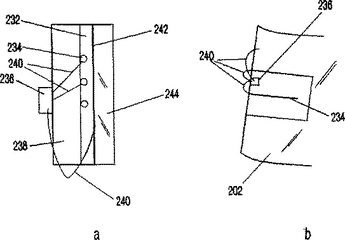 (もっと読む)
(もっと読む)
スイングドア装置におけるドアの位置検出装置
スイングドア装置が操作シャフト(5)を有し、操作シャフトがドアの動作に応じて回転する、スイングドア装置におけるドアの位置検出装置。ドア位置の検出は電位差手段(13、14)によって行われるように構成され、電位差手段は、少なくとも実質的に同一の特性曲線を有し、作動的に操作シャフト(5)の回転角度に応じるように構成されている。  (もっと読む)
(もっと読む)
レール継目検出器および軌道検測車のレール継目位置検出装置
【課題】
小型で天候に左右されずにレールとの継目が高い精度で検出できる軌道検測車のレール継目検出器およびレール継目位置検出装置を提供することにある。
【解決手段】
この発明は、レールの頭部の上部に対応して軌道検測車等の車輌に設けられ隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルと、第1、第2の空芯コイルにバイアス電流を流してこれら空芯コイルのインダクタンスの変化に対応する第1、第2の検出信号を得る検出回路とを備えていて、第1の検出信号と第2の検出信号のレベルの差に基づいてレール継目の検出信号を得るものである。
(もっと読む)
パターン検出装置および方法
【課題】 固体表面の凹凸パターンなどを簡単かつ精度よく高速に検出できるとともに、パターンを検出するための装置を小型かつ安価に製造する。
【解決手段】 (a)に示すように、ヒータ兼センサ層32の表面に、指34を接触させると、指34の表面で指紋を形成する皮膚の山34aが各抵抗素子33に接触する。各抵抗素子33に通電して発熱させると、皮膚の山34aに接触している抵抗素子33は、熱が逃げ、温度上昇の程度が、谷34bに対応する位置の抵抗素子33よりも小さくなる。(b)に示すように、開始時期をずらしながら、一部重複するように通電し、各抵抗素子33毎に一定時間以上の通電を、全体では短時間に行う。(c)に示すように、各抵抗素子33の抵抗値は、通電開始から一定時間経過後に検出する。各抵抗素子33への通電は、時間をずらしているので、ずれるタイミングに合わせて、サンプリングを切換え、1つの検出回路で、複数の抵抗素子33の抵抗値をシリアルに検出することができる。
(もっと読む)
121 - 140 / 163
[ Back to top ]