
Fターム[2F065AA24]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 高さ (1,116)
Fターム[2F065AA24]に分類される特許
61 - 80 / 1,116
ラインセンサカメラのキャリブレーション装置およびキャリブレーション方法
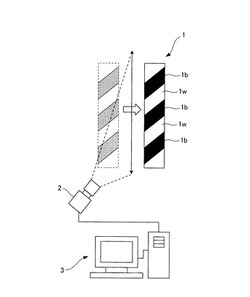
【課題】カメラパラメータを用いることなく簡単に高精度の「pixel→高さ」換算式を求めることを可能とする。
【解決手段】長方形状に形成されその表面に白色領域1wと黒色領域1bとを交互に配されてなるキャリブレーション用機材1と、キャリブレーション用機材1の長手方向を撮影するように配設されたラインセンサカメラ2と、ラインセンサカメラ2から出力される画像信号に基づいてラインセンサカメラ2のキャリブレーションを行う処理用コンピュータ3とを備え、白色領域1wと黒色領域1bの幅がそれぞれ同一幅であるとともに白色領域1wと黒色領域1bとの境界線がキャリブレーション用機材1本体の長手方向に対して所定の角度θだけ傾斜するように構成した。
(もっと読む)
タイヤの欠陥検出方法

【課題】 タイヤ表面の薄広凸欠陥を高精度に検出することができるタイヤの欠陥検出方法を提供する。
【解決手段】 ステップS1を開始するまでに、予め連続的にスリット光像を含む2次元画像を取得しておく。ステップS1では、撮像された複数の2次元画像データから、スリット光像を抽出する。ステップS2では、抽出されたスリット光像から偏心によるぶれである偏心成分を除去する。ステップS3では、偏心成分を除去した光像に基づいて特徴量を算出し、ステップS4で、算出された特徴量に基づいて薄広凸欠陥を検出する。
(もっと読む)
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】所定の波長域に渡り分光された光の波長を検出する受光装置10であって、ホトデテクター142と、ホトデテクター142に入光する光を規制する開孔143aを有するマスク143を備えた受光手段14と、光を波長域に渡り分光した回折光を受光手段14に向ける回折格子11と、回折格子11を作動し波長域に渡り分光した回折光を選択的に該マスク143の開孔143aに位置付ける作動手段12と、回折格子11の作動位置を検出する位置検出手段13とを具備している。
(もっと読む)
投影装置およびその方法、並びに投影装置を用いた形状認識装置およびその方法
【課題】配置の制約が少なく、かつ照度不足および照度ムラが生じにくい投影装置を提供する。
【解決手段】撮像部の撮像対象物に対して光を投影する投影装置200であって、放射する光の波長帯が互いに異なる赤色LED240R、緑色LED240Gおよび青色LED240Bと、撮像対象物の特性に基づき、各LEDが放射する光の光量を制御する投影制御部230と、複数のLEDから放射される光を、同一の光軸上に導くことにより、撮像対象物に対して光を投影するリレー部250とを備える。
(もっと読む)
検出対象物の中心位置を算出する方法、装置およびプログラム
【課題】複数の検出対象物が任意の方向を向いて配置されている場合であっても、それぞれの検出対象物の中心位置を算出することができる方法、装置およびプログラムを提供する。
【解決手段】既知の半径を有する円筒または球を少なくとも一部に含む検出対象物の中心位置を算出する方法を提供する。当該方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、検出対象物の形状に相当する領域を入力画像から抽出するステップと、抽出された領域についての高さ情報を取得するステップと、抽出された領域内において明るさが極大となる部分を特定し、当該部分の法線方向を決定するステップと、決定した法線方向と、既知の半径と、明るさが極大となる部分の位置と、対応する高さ情報とから、検出対象物の中心位置を決定するステップとを含む。
(もっと読む)
形状計測装置
【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
欠陥観察方法及びその装置
【課題】検査装置の検査情報とレビュー装置で取得した観察情報とを用い、欠陥の高さ、屈折率、材質の情報を取得して欠陥材質・屈折率分析や、微細なパターン形状の三次元解析を行う方法、並びにこれを搭載した欠陥観察装置を提供する。
【解決手段】試料上の欠陥を観察する方法において、光が照射された試料からの反射・散乱光を受光した検出器からの検出信号を処理して検出した検査結果の情報を用いて観察対象の欠陥が存在する位置を走査電子顕微鏡で撮像して画像を取得し、この取得した観察対象の欠陥の像を用いて欠陥のモデルを作成し、作成された欠陥のモデルに対して光を照射したときに欠陥モデルから発生する反射・散乱光を検出器で受光した場合のこの検出器の検出値を算出し、この算出した検出値と実際に試料からの反射・散乱光を受光した検出器の検出値とを比較して観察対象の欠陥の高さ又は材質又は屈折率に関する情報を求めるようにした。
(もっと読む)
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】検出領域における光を検出するための受光装置であって、ホトデテクターと、ホトデテクターに入光する光を規制する開孔を有するマスクを備えた受光手段と、受光手段を検出領域に渡り移送せしめる移動手段と、受光手段の移動位置を検出する位置検出手段とを具備している。
(もっと読む)
計測装置
【課題】被計測面の高さの計測において、計測精度の高精度化と計測範囲の広範囲化との両立に有利な技術を提供する。
【解決手段】参照光と計測光との干渉光強度を検出する複数の領域が2次元状に配列された検出部と、光源からの光を第1と第2の光に分離する第1の光学系と、第1の光が平行光で入射され2次元状の光路長差を有する複数の参照光束を生成する生成部と、生成部で生成された参照光の複数の参照光束のそれぞれが対応する複数の領域に入射するように、検出部に入射させる第2の光学系と、第2の光を被計測面の計測点に集光する第3の光学系と、計測点で反射された第2の光が複数の領域のそれぞれに入射するように、検出部に入射させる第4の光学系と、複数の領域のそれぞれに入射する複数の参照光束が有する光路長と複数の領域との対応関係に基づいて、複数の領域で検出される干渉光の強度から計測点における被計測面の高さを算出する処理部を有する。
(もっと読む)
曲面印刷装置及び曲面印刷装置の印刷制御方法
【課題】簡易な手法により、人の爪部のような湾曲形状の印刷対象面に対しても高精細な印刷を行うことのできる曲面印刷装置及び印刷制御方法を提供する。
【解決手段】インク噴射方向における印刷部40との距離が幅方向の中央部では小さな距離L1で、幅方向の端部に行くほど大きな距離L2となる湾曲形状をなす爪領域Taを有する爪部Tに対して印刷を行うネイルプリント装置1であって、爪領域Taの幅方向の中央部の印刷ピッチP1よりも幅方向の両端部の方の印刷ピッチP2が印刷部40による印刷の際の印刷ピッチが細かくなるように対応付けられたピッチ調整基本テーブルに応じて、爪領域Taに印刷すべき画像の元画像データから爪領域画像の幅寸法に対応した印刷用データを生成し、この印刷用データにしたがって爪領域Taに印刷を施す。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
画像合成のための3次元プロファイルマップの作成方法
【課題】光学顕微鏡を用いて、一つの立体的な試料に対して、焦点距離の異なる多数の画像を得、これらの画像を組み合わせて、全領域の焦点が合った1枚の2次元合成画像を得るため、試料の高さ情報を表示する3次元プロファイルマップの作成方法を提供する。
【解決手段】試料を異なる高さから撮像して、焦点部位の異なる2次元試料画像を得、離散ウェーブレット変換を行うことにより得られた詳細サブーバンドにおいて、最大の詳細サブーバンド係数値を示す画像の撮像高さで、初期の高さ地図を作成し、それぞれの入力画像において、焦点整合度を計算し、フィルターをかけて、非合焦点のピクセル(非境界点)の高さ情報は除去し、除去されたピクセル(非境界点)の高さを、フィルターを通過したピクセル(境界点)の高さ値から内挿して算出し、前記高さ情報の除去されたピクセルに対して前記内挿によって算出された高さを代入して高さ地図を作成する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
形状測定装置
【課題】プローブを交換する事無く種々の測定精度を得ることができる形状測定装置を提供すること。
【解決手段】第1のライン光を測定物に照射する第1光学系と、第1光学系の少なくとも一部の光学素子を有し、第1のライン光よりも長い第2のライン光を測定物に照射する第2光学系とを有する光照射部と、前記測定物による前記第1のライン光の散乱光を検出する第1の検出部と、前記測定物による前記第2のライン光の散乱光を検出する第2の検出部と、を備える形状測定装置である。
(もっと読む)
レジストの光学特性を変化させる方法及び装置
【課題】集積回路のような電子素子の製造において、光計測を用いた測定の精度を改善する方法及びシステムを提供する。また、調節可能なレジストの光学特性を変化させる方法及びシステムを提供する。
【解決手段】その調節可能なレジスト層は反応性ガス、液体、プラズマ、放射線若しくは熱エネルギー又はこれらを結合させたものを用いて処理されて良い。それによってフォトレジストは露光前に第1組の光学特性と異なる第2組の光学特性を得て、露光波長で又はその近傍の放射線に対して透明ではなくなり、OTSM構造420が光線425、426及び427を反射する。
(もっと読む)
共焦点計測装置
【課題】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置であって、光の波長による、計測対象物の変位を計測する精度の変動を抑えた共焦点計測装置を提供する。
【解決手段】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置である。共焦点計測装置100は、白色LED21と、白色LED21から出射する光に、光軸方向に沿って色収差を生じさせる回折レンズ1と、回折レンズ1より計測対象物200側に配置され、回折レンズ1で色収差を生じさせた光を計測対象物200に集光する対物レンズ2と、対物レンズ2で集光した光のうち、計測対象物200において合焦する光を通過させるピンホールと、ピンホールを通過した光の波長を測定する波長測定部とを備えている。回折レンズ1の焦点距離は、回折レンズ1から対物レンズ2までの距離と、対物レンズ2の焦点距離との差より大きい。
(もっと読む)
光学素子、光学素子を備えた顕微鏡装置ならびに光学素子の組み立て方法
【課題】液晶光学素子の光軸を対物レンズの光軸に位置合わせできる光学素子を提供する。
【解決手段】光学素子(103、10)は、対物レンズ(104)よりも光源(101)側に配置され、液晶分子が含まれる液晶層と、その液晶層を挟んで対向するように配置された二つの第1の透明電極とを有し、その液晶層を透過する光源から発した所定の波長を持つ直線偏光の位相または偏光面を、二つの第1の透明電極の間にその所定の波長に応じた電圧を印加することにより制御する液晶光学素子(3、12、13)と、液晶光学素子(3、12、13)の光軸を対物レンズ(104)の光軸と位置合わせ可能なように液晶光学素子(3、12、13)を対物レンズ(104)に対して相対的に移動可能な光軸調整機構(4、14)とを有する。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
面積計測装置および面積計測方法
【課題】 基準面に載った流動体が占める面積を測定する技術を提供する。
【解決手段】 流動体(20)が広がった所定の基準面(10)および前記流動体(20)の境目に対してポイント照射光を照射する照射ポインタ(70)と、 その照射ポインタ(70)によって照射される前記基準面(10)および前記流動体(20)の境目を連続撮影する連続撮影用カメラ(48)と、 その連続撮影用カメラ(48)の撮影領域に入るように固定された面積算出の基準となる面積基準体(80)と、 前記の連続撮影用カメラ(48)にて連続撮影された画像データにおける前記の面積基準体(80)および前記のポイント照射光がなぞった軌跡にて囲われた流動体(20)の面積を算出する面積算出手段と、を備える。 前記の照射ポインタ(70)が照射するポイント照射光は、前記の流動体(20)および前記の基準面(10)と明確に区別可能な色彩とする。
(もっと読む)
61 - 80 / 1,116
[ Back to top ]