
Fターム[2F065AA24]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 高さ (1,116)
Fターム[2F065AA24]に分類される特許
81 - 100 / 1,116
検測車動揺補正方法及び装置、並びに検測方法及び装置
【課題】検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく検測できるようにする。
【解決手段】検測装置はレールに沿って走行する検測車両に搭載されており、車両の運行に関する周辺構造物の状態(サードレールの高さ)を測定する。検測車両には、検測車両の走行中に車両自体がレールに対して動揺する状態(車両のローリング及びヨーイング等)を測定する動揺状態測定手段が搭載されている。検測装置は、動揺状態測定手段によって測定された検測車両の動揺状態に基づいてその検測結果を補正する。これによって、検測装置は検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく正確な検測を行うことができる。
(もっと読む)
光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置

【課題】2つの屈折率分布間の距離を、精度よく、非破壊で、高速に測定可能な光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置を実現する。
【解決手段】光を散乱させて測定・解析するための入射光波長の最小値をλとするとき、周囲と屈折率の異なる2つの光散乱体60の距離が0.7λ以上15λ以下であり、2つの光散乱体の全光線透過率または全光線反射率が50%以上であり、散乱光強度の角度分布またはある角度での散乱光強度の波長分布を角度の正弦または1/波長を横軸としてフーリエ変換し、フーリエ変換後のピークの横軸を読み取ることで、2つの領域の距離を求める。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
情報処理方法、眼窩下点の位置推定方法、フランクフルト平面の算出方法および情報処理装置
【課題】被測定者の負担が少なく、かつ簡便な方法によって、眼窩下点などの解剖学的特徴点の位置を推定する方法および装置を提供する。
【解決手段】人(被測定者)の頭部の皮膚表面より、目頭点ENT、目尻点ECT、目頭点ENTの側の眼裂と眉との間の凹部にあたる瞼点PLP、および耳珠上縁点の座標をそれぞれ取得する。取得された目頭点ENT、目尻点ECTおよび瞼点PLPを通る仮想球面SPHの最下点の座標を算出することで眼窩下点ORBの位置を推定する。そして、一または二の眼裂に関する眼窩下点ORBおよび一または二の耳珠上縁点を含む少なくとも3点の座標に基づいてフランクフルト平面を算出する。
(もっと読む)
エンドレスバンドの検査方法及び装置
【課題】溶液製膜方法に用いたときに厚みムラの原因となるバンドの反りを、溶液製膜方法を行うことなく検知する。
【解決手段】駆動部206は、検査用ローラ201の回転軸201aに所定の外力を印加する。検査用ローラ201に巻き掛けられたバンド91にテンションが印加される。センサユニット208は測定位置MP1から測定窓208aまでの距離Aを測定する。センサユニット208は測定位置MP2から測定窓208aまでの距離Bを測定する。制御部は、距離A,距離B,記憶部から読み込んだバンド厚みDを用いて浮き量CLを算出する。制御部は、検査対象となるバンド91の浮き量CLが全て閾値TH1以下である場合には、当該バンド91は「合格品」と判定する。検査対象となるバンド91の浮き量CLのいずれかが閾値TH1を超える場合には、当該バンド91は「不合格品」と判定する。
(もっと読む)
面形成支援システム、面形成支援装置、及び面形成支援プログラム
【課題】本発明は、施工作業に要する時間を短縮させることができる面形成支援システム、面形成支援装置、及び面形成支援プログラムを提供する。
【解決手段】仮想空間において、予め定められた目標面に表示された所定画像を予め設定した複数の撮影位置から予め設定した撮影方向に向けて仮想的に撮影することにより得られる撮影位置毎の画像情報を生成する情報生成装置と、実空間において、目標面に対する複数の撮影位置と同一の位置関係になるよう各々設置され、対応する画像情報により示される画像を、前記目標面を形成する際の基礎となる基礎面に、対応する撮影方向に向けて投影する複数の投影装置と、を備えた。
(もっと読む)
散乱計測定の改良システムおよび応用
【課題】回折構造体の測定パラメータモデルを利用する分光散乱システムおよび方法を提供する。
【解決手段】モデルの固有値を事前計算し、記憶し、ある共通の特性をもつ他の構造体に対して後に再利用する。1つ以上のパラメータの値を求めるために用いられる散乱データは、下敷フィルム特性に対して感度が低くなる波長におけるデータだけに制限することが可能である。代表的な構造体をスラブ200’(i)のスタックにスライスし、各スラブの近似を行うため四角形ブロック210,212,214,216,218のアレイを作成することによって三次元グレーティングに対するモデルを構築することが可能となる。
(もっと読む)
計算装置、計算方法及び計算プログラム
【課題】手間を掛けずに精度高く、カメラの設置高や設置角度を計算可能な計算技術を提供することを目的とする。
【解決手段】計算装置は、第1取得部と、第2取得部と、計算部と、を備える。第1取得部は、各々異なる位置にあるときの同一の対象物が同一のカメラにより、各々撮影された複数の画像を取得する。第2取得部は、対象物の高さを取得する。計算部は、複数の画像及び高さを用いて、カメラの設置角度及び設置高を計算する。
(もっと読む)
三次元形状計測装置、および三次元形状計測方法
【課題】正確に半田の高さを算出することができる三次元形状計測装置を提供することである。
【解決手段】半田塗布前の検査ブロックにおいて、配線パターンの近似面を作成する(S22)。また、半田塗布前の検査ブロックにおいて、ランドの近似面を作成する(S23)。そして、作成した配線パターンの近似面Srとランドの近似面Slとに基づいて、オフセット、すなわち、配線パターンの近似面Srとランドの近似面Slとの距離を算出する(S24)。そして、算出したオフセットをRAM等に記録する(S25)。そして、半田塗布後に、記憶したオフセットを読み出して、半田の高さを計算する。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】等速自在継手用ブーツ等の成形部品の欠陥を安定して効率的にしかも安価に検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】軸方向両端部に開口部を有し、かつこの開口部に外径側に突出する突起部2を設けた弾性材料からなる筒状の成形部品30における欠陥を検査する。軸心廻りに回転している成形部品に対してその突起部2の突起量を検出する。その後、その検出した測定データから成形部品30の回転振れ及び変形に基づく変位を修正した修正データを算出する。次に、設定された欠陥判断基準となる閾値と修正データとの比較と、設定された区間内での修正データの傾きの正常値との比較とを行う。これらの比較に基づいて成形部品の欠陥を検査する。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
印刷半田検査装置
【課題】半田の撮像画像の欠落を無くすことが可能な印刷半田検査装置を提供することにある。
【解決手段】印刷半田検査装置の撮像素子70は、走査方向の垂線に対してなす角θが0度を超え90度未満となるように傾けられ、その撮像領域の長手方向とスリット照明の長手方向が平行となるように照射し走査したとき、そのときの角度を存在率の低いもしくは存在しない長方形や楕円形等の前記半田の回転角度に設定されている。これにより、照射光の長手方向中心軸と、半田の短手方向中心軸を平行にならないようにし、明るさが落ち込む場所が非常に長くなる現象の発生を防ぎ、また、サチュレーション部の欠落画像の補間を可能となる。
(もっと読む)
錠剤の外観検査装置及びPTP包装機
【課題】 錠剤の振動やポケット内の姿勢に影響を受けることなく正確な検査が行えるようにすること
【解決手段】 3Dカメラ装置は、容器フィルムのポケット部内に供給された錠剤を撮像し、三次元計測法により錠剤の表面の各位置の高さ位置を濃淡画像で表したプロファイル画像を求め、処理装置22に送る。処理装置は、プロファイル画像に基づき錠剤の外観検査を行うもので、プロファイル画像中の錠剤を示す画像データを抽出する錠剤検出部31と、抽出した画像データをその錠剤の表面が平坦になるように補正処理をして平坦化画像を生成する平坦化処理部32と、その平坦化画像に基づいて外観異常の判定を行う欠陥解析部34を備える。平坦化処理部32により錠剤の表面の高さ位置が平坦(水平)に正規化されるので、簡単な閾値処理で異常の有無を判定できる。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム
【課題】適切な測定照度で測定対象物を3次元測定することができる3次元測定装置等の技術を提供する。
【解決手段】制御部は、投影部により縞が投影された測定対象物を撮像し、縞の位相が異なる合計4枚の画像を取得する(ステップ107〜109)。次に、制御部は、4枚の画像から各画素の輝度値を抽出して、位相シフト法により輝度値を各画素の高さへ変換する(ステップ110)。次に、制御部は、基板選択領域及び半田選択領域のそれぞれについて、高さの変換が不可とされた画素の割合(エラー率)を算出する(ステップ111)。制御部は、照明の照度を変化させて、ステップ107〜ステップ111の処理を繰り返す。制御部は、各照度での選択領域のエラー率に基づいて、投影部の最適な照度を決定する(ステップ114)。
(もっと読む)
光学的計測装置
【課題】位相シフト法による干渉縞を用いた高さ計測装置において、位相シフト画像に内包する各種ノイズ成分の影響を抑制し高精度な光学的計測装置を提供する。
【解決手段】測定対象物の測定面の高さと上記測定面の高さに応じた複数の異なる波長の光による干渉縞画像内の各点の明るさが変化する部分の位相との関係を所定の演算式に数式化するとともに、上記測定対象物の測定面の高さと測定面の高さに応じた上記複数の異なる波長の光による干渉縞画像内の各点の明るさが変化する部分の位相との組合せを、同数式化した所定の演算式に基いて演算し、この演算により求めた位相情報を位相コード変換テーブルに反映させることによって、上記測定対象物の測定面の高さを計測する。
(もっと読む)
基板検査装置および基板検査システムならびに基板検査結果の確認用画面の表示方法
【課題】部品およびはんだに対する3次元計測結果に基づく検査の結果や検査対象部位の状態を、ユーザが容易に確認できるような表示を行い、検査結果の確認作業を支援する。
【解決手段】基板上の部品およびはんだに、それぞれ異なる手法の3次元計測を実施し、それぞれの計測により得た3次元情報をはんだ付け部毎および種別毎に読出可能に蓄積する。そして、これらの蓄積情報に基づき、はんだ付け部位毎に部品とはんだとの関係を表す画像を生成し、この画像を含む画面を検査結果の確認用の画面として表示する。好ましい確認用画面では、はんだの3次元情報が表す立体形状を部品のはんだへの接合面の近傍位置で切断した場合に得られるはんだの断面を正面として、このはんだの断面と部品との関係を示す画像(YZ図またはXZ図)が表示される。
(もっと読む)
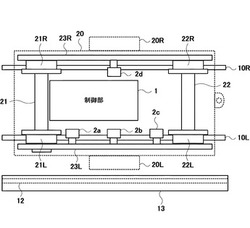
測定装置、測定方法及びステージ装置
【課題】置の大型化を招くことなく移動ステージの位置検出を可能とする測定装置を提供する。
【解決手段】第1軸方向に沿って可動体に第1ビームを出射し、可動体で反射した第1ビームが第1光路で進む前記第1光学部材と、第1軸方向に沿って可動体に第2ビームを出射し、可動体で反射した第2ビームが第2光路で進む第2光学部材と、第1軸方向に沿って可動体に第3ビームを出射し、可動体で反射した第3ビームが第3光路で進む第3光学部材と、第1光路を進んだ第1ビーム、及び第2光路を進んだ第2ビームが互いに干渉する干渉計と、干渉計での干渉に基づいて、第3軸方向における可動体の位置情報を得る算出装置とを備え、第1軸方向に沿って可動体に向かう第3ビームの進路は、第3軸方向について、第1光路の進路と第2光路の進路との間に位置する。
(もっと読む)
81 - 100 / 1,116
[ Back to top ]