
Fターム[2F065AA24]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 高さ (1,116)
Fターム[2F065AA24]に分類される特許
161 - 180 / 1,116
形状検査装置及び形状検査方法
【課題】一度のスリット光の走査により、任意の断面線における断面形状を検査することができる形状検査装置及び形状検査方法を提供する。
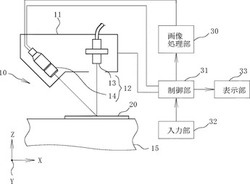
【解決手段】撮像光学系12を用いて被検査物20の形状を検査する形状検査装置10であって、被検査物20にスリット光を投射する投射手段13と、スリット光の走査により被検査物20上に順次形成される形状線を撮像する撮像手段14と、順次形成された各形状線の撮像データに基いて、被検査物20の三次元形状を点群データとして取得する点群データ取得手段と、点群データに基いて表示された被検査物に、入力に応じて切断線を設定する切断線設定手段と、切断線に対応した点群データにより、切断線における被検査物20の断面形状を算出する断面形状算出手段とを備えている。
(もっと読む)
形状測定装置

【課題】精度の高い測定結果を得る。
【解決手段】広帯域スペクトルを有する光源からの光を被測定対象と参照面とに導きその光路長差により干渉光強度分布画像を生成する光学系と、干渉光強度分布画像を撮像する撮像手段と、光路長差を変化させる光路長差変更手段と、干渉光強度分布画像から各測定位置における光軸方向の位置を求める演算手段とを備える。演算手段は、複数の信号発生手段と、その出力信号に重み付けをして出力する重み付け手段と、周期信号を加算して検出信号として出力する第1の信号加算手段と、直流信号と検出信号とを加算する第2の信号加算手段と、干渉強度列から第2の信号加算手段の出力を減算して誤差信号を出力する信号減算手段と、誤差信号から重み付け手段の重みを調整する適応アルゴリズム部とを有する適応信号処理ブロックと、検出信号のピーク位置を検出するピーク検出ブロックとを有する。
(もっと読む)
測定装置
【課題】ウェハを搬送する際に生じる振動に起因して測定データに現れるオフセット成分のバラツキを除去する。
【解決手段】Y方向に光切断線を照射して平行断面形状データZf_X0を求める。X方向に光切断線を照射して直交断面形状データZg_Y0,Zg_Y1,・・・,Zg_Ynを求める。平行断面形状データZf_X0と直交断面形状データとの交差位置の高さデータが等しくなるようにオフセット値o(Y0),o(Y1),・・・,o(Yn)を求める。直交断面形状データZg_Y0,Zg_Y1,・・・,Zg_Ynにオフセット値o(Y0),o(Y1),・・・,o(Yn)を加算し、補正直交断面形状データZg_Y0´,Zg_Y1´,・・・,Zg_Yn´を求める。
(もっと読む)
廃棄物処分場における廃棄物の管理システム
【課題】廃棄物処分場に埋め立て処分された廃棄物を、どの位置に、どのような種類の廃棄物があるのかを容易に把握し、再利用を容易にする。
【解決手段】廃棄物処分場45に搬入された廃棄物の種類を含む廃棄物情報を取得する廃棄物情報取得部と、前記取得した廃棄物情報を記憶する廃棄物情報記憶部と、前記搬入された廃棄物が、前記廃棄物処分場内に投入された箇所の平面的な位置情報及び高さ情報を含む投入位置情報を取得する投入位置情報取得部と、前記取得した投入位置情報を、該当する廃棄物の廃棄物情報に関連付けて前記廃棄物情報記憶部に記憶する位置情報記憶部とを備える。
(もっと読む)
電子部品実装装置
【課題】撮像による画像データを用いてより高精度な実装対象の電子部品の外部情報を取得する。
【解決手段】部品配置部に配置された電子部品を撮像する撮像手段1と、部品配置部と撮像手段との距離を可動調節する可動部111と、これらを制御して、電子部品について部品配置部と撮像手段の距離が異なる複数の画像データを取得する撮像制御部120と、各画像データの同一画素におけるコントラストの対比に基づいて、当該各画素における撮像手段から部品配置部の合焦点位置を求める測距処理部23と、撮像エリア内の各画素における合焦点位置と、各画像データにおける各画素の輝度値とから、撮像エリアの一部の範囲内の画素における合焦点位置での輝度値を求め、局所全焦点画像を生成する全焦点画像生成部25とを備えている。
(もっと読む)
共焦点顕微鏡装置
【課題】本発明では、正確に測定対象平面を検出すると共に、測定時間の短縮が可能な共焦点顕微鏡装置を提供することを目的とする。
【解決手段】観察試料8の観察面に光を集束する少なくとも1つの対物レンズ7と、観察試料8と対物レンズ7との距離を所定間隔で変化させるZレボルバ16と、観察試料8と対物レンズ7との距離に応じて所定間隔を設定する測定条件情報指示部19と、設定された所定間隔で上記距離を変化させるようにZレボルバ16を駆動制御するZ駆動制御部22と、観察面からの反射光を検出する光検出器12と、上記所定間隔の距離毎に観察面上に光を二次元走査して光検出器12で検出される検出信号により平面画像を生成し、生成された複数の平面画像を用いて三次元画像を生成するコントローラ2を有する共焦点顕微鏡装置100により、上記課題の解決を図る。
(もっと読む)
車両寸法検出システム
【課題】車両通過帯を通過する車両の寸法を検出すること。
【解決手段】車両通過帯170の側方に設けられて、当該車両通過帯170を通過する車両190を映す鏡130と、車両通過帯170の上方に設けられて、当該車両通過帯170を通過する車両190と、鏡130に映った当該車両190の鏡像とを撮像する撮像装置150と、撮像装置150と電気的に接続されて、撮像装置150が撮像した画像における、車両190の実像の輪郭線上の特徴的な複数の実像点と、鏡130に映った当該車両190の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両190の寸法を演算により求める演算装置110とを備える。
(もっと読む)
高輝度点光源用の蛍光体ホイール構成
【課題】可動基板上に改良された発光蛍光体構造を有する蛍光体点光源を提供する
【解決手段】蛍光体点光源素子は、基板と、基板上に配置された発光蛍光体粒子を備えることで、動作トラック領域の平坦な動作表面の近くに密集状態の粒子配置を有する円形の動作トラックを提供する。動作トラック領域は、高輝度点光源を提供する点において照射されながら回転される。密集状態の粒子配置は、キャビティ内の蛍光体粒子を回転させてキャビティ周辺の基板上で蛍光体を圧縮することにより、または他の機械的な圧縮方法により達成され得る。密集状態の粒子配置を、キャビティを囲む形成要素に当てて圧縮するか、機械加工することにより、平坦な動作表面を提供することができる。蛍光体粒子に浸透した接着結合剤を硬化させることで、密集状態の粒子配置を固定することができる。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
車輪形状測定装置
【課題】作業員の技量にかかわらず短時間で精度高く車輪外周面形状を測定することが可能な車輪形状測定装置を提供する。
【解決手段】車輪1におけるフランジ及び踏面を含む外周面2の形状を測定する車輪形状測定装置100であって、筐体(基部)10と、該筐体10内に取り付けられて車輪1の径方向外側から車輪1の外周面2に向かって光線を照射し、その反射光によって該外周面2までの距離を検出する距離測定部30と、筐体10を車輪1に対して位置決めして固定する位置決め手段20と、距離測定部30を筐体10に対して車輪1の軸線O方向にスライド移動可能とさせるスライド手段40と、外周面2における光線の反射にて生じる乱反射光を吸収する乱反射光吸収手段60とを設ける。
(もっと読む)
部品はんだ付け検査装置及びその検査方法
【課題】 表面実装部品がはんだ付けされた基板上をレーザ変位計で走査することによりはんだ付けされた表面実装部品の高さを効率良く高精度で測定し、虚報率を抑えながら表面実装部品の電極のはんだ付けを精度良く良否判定する。
【解決手段】 レーザ計測手段で計測された基板表面にはんだ付けされた個々の表面実装部品の変位量の最小高さと最大高さと、あらかじめ指定してデータベースに格納した前記表面実装部品の高さ範囲とはんだ材の厚み範囲とを照合し、前記表面実装部品のはんだ付け状態を論理判定する。
(もっと読む)
画像処理装置、画像処理システム、画像処理方法及びプログラム
【課題】試料中のターゲットの深さ位置を、大容量のメモリを必要とすることなく検出すること。
【解決手段】画像処理装置20は、ステージ11をZ方向へ移動させながら撮像素子30を露光させることで、蛍光マーカMを示す第1の輝点を含む試料SPLの第1の画像を取得し、ステージ11をZ方向へ第1の速度で等速移動させるとともにX方向へ第2の速度で等速移動させながら撮像素子30を露光させることで、上記蛍光マーカMを示す第2の輝点を含む第2の画像を取得し、第1の画像と第2の画像の合成画像内で、第1の輝点と第2の輝点との間の距離Dを算出し、当該距離Dと、上記第1の速度及び第2の速度とを基に、試料SPL中の蛍光マーカMの高さhを算出する。
(もっと読む)
架線位置測定装置
【課題】効率よく正確に架線の位置を測定することができる架線位置測定装置を提供する。
【解決手段】架線位置測定装置において、架線を撮影する第1のラインセンサカメラ1及び第2のラインセンサカメラ2と、架線までの距離を計測するレーザ距離計3と、第1のラインセンサカメラ及び第2のラインセンサカメラから出力された画像データを基にラインセンサ画像上の架線の位置情報を算出する第1の画像処理部10及び第2の画像処理部11と、ラインセンサ画像上の架線の位置情報とレーザ距離計3から出力された距離情報とを記憶する処理メモリ12と、ラインセンサ画像上の架線の位置情報と距離情報とに基づきステレオ対応点の探索を行うステレオ対応点探索部13と、探索したステレオ対応点に基づき架線の高さと偏位を算出する高さ・偏位算出部14とを備えた。
(もっと読む)
形状測定装置および形状測定方法
【課題】凹凸形状の測定精度の向上を図ることができる形状測定装置を提供する。
【解決手段】本発明の形状測定装置は、測定対象1の凹凸形状にライン光を照射する投光装置2と、前記投光装置2によって前記凹凸形状に形成される光切断線を撮像する撮像装置3と、前記凹凸形状の上底及び下底の各々で前記光切断線の幅が最小になるように前記投光装置2をその光出射軸方向4に移動させる駆動装置5と、前記撮像装置3によって撮像された、前記凹凸形状の上底で前記光切断線の幅が最小となる画像と、前記凹凸形状の下底で前記光切断線の幅が最小となる画像に基いて、前記凹凸形状の高さ又は深さを算出する処理装置6と、を備える。
(もっと読む)
変位検出装置
【課題】高精度に高さ方向の位置を検出可能な変位検出装置を提供する。
【解決手段】光源1から出射される光を2つの光束に分割する第1の光束分割手段3と、分割された第1の光束を反射する反射部材8と、第1の光束分割手段によって分割された第2の光束を被測定面上に集光する対物レンズ5と、反射された第1の光束と、被測定面によって反射された第2の光束との干渉光を受光する第1の受光手段30と、受光した干渉光強度に基づいて被測定面の高さ方向の相対位置情報を出力する相対位置情報出力手段60と、第2の光束の一部を取り出す第2の光束分割手段20と、取り出された第2の光束に非点収差を発生させる非点収差発生手段10と、非点収差が発生した第2の光束を受光する第2の受光手段40と、検出された受光強度に基づいて被測定面の高さ方向の絶対位置情報を出力する絶対位置情報出力手段50とを含む。
(もっと読む)
円筒状ワークの寸法測定装置
【課題】円筒状ワークの外径寸法を、迅速かつ正確に取得することが可能な円筒状ワークの寸法測定装置を提供することを目的とする。
【解決手段】測定対象となる円筒状ワークWの中心軸線と平行に配置された固定軸Pと、該固定軸Pの径方向に離間して平行に配置され、固定軸Pを中心とした円の周方向に回動可能とされた可動軸Qと、可動軸Pと固定軸Qとの対向方向に延びる基準直線l上における円筒状ワークWによる遮蔽距離を検出する距離センサ50とを設ける。
(もっと読む)
車両寸法計測装置
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
車両寸法測定方法及び装置
【課題】車両等にターゲットなどを設けることなく、低価でかつ簡易な処理プログラムによって非接触で車両等の寸法を高精度に測定できるようにする。
【解決手段】車両の左右側面及び上面を含む外周面全体に渡って複数のレーザ光を間断のない線状となるように照射することによって、この照射箇所を線状光として認識することができるようになる。この線状光を光切断線としてカメラ装置などで検出することによって車両の外形寸法を測定するようにした。また、測定された車両の外形寸法が車両限界内にあるのか否かの判定を行なう。さらに、車両限界の超過箇所を視認可能に表示する。
(もっと読む)
液浸非接触形状測定装置
【課題】液中の測定ワークの表面形状も測定することができる液浸非接触形状測定装置を提供する。
【解決手段】レーザープローブ3の下側を容器形状のコレット24で覆い、コレット24をレーザープローブ3ごと上下動させることができるため、測定ワーク6が設けられた液中にコレット24を浸して、液中の測定ワーク6の表面をレーザー光Lにより計測することができる。電極プローブ26により液中における測定ワーク6の表面のイオン分布を計測することもできる。
(もっと読む)
161 - 180 / 1,116
[ Back to top ]