
Fターム[2F065AA24]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 高さ (1,116)
Fターム[2F065AA24]に分類される特許
101 - 120 / 1,116
検出装置
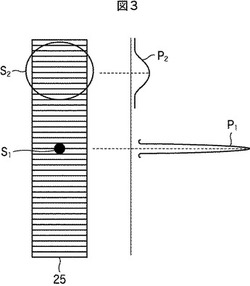
【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
基板検査装置及び基板検査方法

【課題】基板に形成された凹部の深さを、加工方法の制約を受けず、かつ、任意の時間に、非破壊、非接触で測定する技術を提供する。
【解決手段】基板9に形成された貫通ビア9H(凹部)の深度を検査する基板検査装置100であって、基板9に向けて電磁波パルスを照射する電磁波パルス照射部13と、電磁波パルスを検出する電磁波パルス検出部15とを備える。また、基板検査装置100は、貫通ビア9Hが形成されているビア形成領域92Rを透過した電磁波パルスの時間波形と、ビア形成領域92Rとは異なる参照領域を透過した電磁波パルスの時間波形とを比較して、その位相差を取得する位相差取得部25と、前記位相差に基づいて、前記ビア形成領域に形成された貫通ビアの深度を取得するビア深度取得部27とを備える。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】光軸に垂直な面内方向の分解能を容易に変更することができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】本発明の一実施形態に係る三次元画像取得装置10は、対物レンズ13の被計測体側共役点の位置と被計測体15の位置とのXY方向の相対的な位置関係を変更するよう載置台16をXY方向に変位させる載置台変位部22を有する。また、三次元画像取得装置10は、載置台変位部22および現在の載置台16の位置における被計測体15の高さを決定する高さ決定部54を制御することにより、載置台16の初期位置と、載置台16を初期位置からXY方向に被計測体側共役点の互いの離間距離より小さい距離移動させた1または複数の補間位置と、のそれぞれの位置での被計測体側共役点における被計測体15の高さの情報からなる被計測体15の三次元形状情報を取得する形状情報取得部55を有する。補間位置は、複数の補間位置パターンのうちの1つが選択されて決定される。
(もっと読む)
三次元形状計測装置、部品移載装置および三次元形状計測方法
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
光学分光システムを使用するパラメトリック・プロフィーリング
【課題】回折格子の形状特徴物などの小寸法の形状特徴物のプロフィールを見出すためのシステムを提供する。
【解決手段】シード・プロフィールのギャラリが作られ、半導体装置についての製造プロセス情報を用いて該プロフィールに関連する初期パラメータ値が選択される。回折構造および関連するフィルムを測定するとき、反射率Rs,Rpなどのいろいろな放射パラメータおよび楕円偏光パラメータを使用することができる。放射パラメータのうちのあるものは、該プロフィールまたは該フィルムのパラメータ値の変化に対してより敏感な1つ以上の放射パラメータを選択してより精密な測定に到達することができる。プロフィール・パラメータのエラーを補正するために上述した手法をトラック/ステッパおよびエッチャに供給してリソグラフィおよびエッチングのプロセスを制御することができる。
(もっと読む)
計測装置
【課題】光路長差が小さくなっても被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の基準面から上面までの距離を計測する計測装置であって、被加工物の上面で反射した反射光と基準面で反射した基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形における各波長毎の隣接する1またはn個隣の光強度との差を演算して分光干渉差分波形を求め、分光干渉差分波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準面で反射した基準反射光の光路長との光路長差に基づいて被加工物の基準面から上面までの距離を求める。
(もっと読む)
光学式変位計
【課題】対象物の変位を正確に検出することが可能な光学式変位計を提供する。
【解決手段】投光部1は、偏光方向が互いに異なる第1および第2の光を選択的にワークWに照射する。ワークWからの反射光が、受光レンズ22を通して受光素子21に入射する。波形生成部は、受光素子21による第1および第2の光の受光量分布を示す第1および第2波形データを生成する。波形処理部7は、第1および第2の波形データの間で互いに対応するピークの比を算出し、算出された比に基づいて、第1および第2の波形データの各々から1つのピークを選択し、そのピークの位置を検出する。
(もっと読む)
欠陥検査方法及びその装置
【課題】
複数の方向に配置した複数の検出器からの信号を基板の高さ変動の影響を受けることなく処理して基板上のより微細な欠陥を検出することを可能にする。
【解決手段】
第1の集光検出手段と第2の集光検出手段とにそれぞれ複数列の光センサアレイを有する光電変換器を備え、処理手段は第1及び第2の集光検出手段のそれぞれの複数列の光センサアレイからの検出信号を用いて試料の表面に対する第1及び第2の集光検出手段の焦点位置のずれを求め、この求めた第1及び第2の集光検出手段のそれぞれの焦点位置のずれに応じて第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを補正し、この補正した第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを統合して試料上の欠陥を検出するようにした。
(もっと読む)
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
平面度測定装置
【課題】変位計と測定対象物との間の相対移動に起因する誤差を適切に補正すること。
【解決手段】測定対象物の一次元形状を測定する変位計と測定対象物との間の相対位置をずらしながら測定対象物の平面度を測定する平面度測定装置は、第1方向の第1測定ラインに沿って被測定面の一次元形状を測る第1測定と、第1測定ラインと第1交差点P2で交差する第2方向の第2測定ラインに沿って被測定面の一次元形状を測る第2測定と、第2測定ラインおよび第1測定ラインとそれぞれ第2交差点P3および第3交差点P1で交差する第3方向の第3測定ラインに沿って被測定面の一次元形状を測る第3測定と、第1測定による第1の一次元形状を示す第1の測定値列DL1、第2測定による第2の一次元形状を示す第2の測定値列DL2、および第3測定による第3の一次元形状を示す第3の測定値列DL3を第1交差点P2乃至第3交差点P1においてそれぞれ一致させるように第1の測定値列DL1乃至第3の測定値列DL3を補正する補正処理と、を行う。
(もっと読む)
検出装置
【課題】合焦精度を向上させる。
【解決手段】高感度のラインセンサ16Bは、レーザ照明部11により照明された対象物2の光点像の光量から得られる高輝度の受光データを取得し、低感度のラインセンサ16Aは、対象物2の光点像の光量から得られる低輝度の受光データを取得し、データ処理部17は、正常時は、高感度のラインセンサ16Bからの高輝度の受光データを選択し、高輝度の受光データを得るときのレーザ光が飽和した場合、低輝度の受光データを選択する。そして、検出部18は、データ処理部17により選択された受光データに基づいて、対象物2の像の合焦状態を検出することで、対象物2の像の合焦状態が確実に検出されるので、合焦精度を向上させることができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
検出装置
【課題】合焦精度の低下を軽減する。
【解決手段】ラインピクセルにより受光される光量データが飽和したとき、ラインピクセルの略中央のピクセルである合焦ピクセルを過ぎたときの前後2ピークのピークピクセルを決定し(S11)、決定したピークピクセルにおけるZ軸カウンタ値を取得し(S12)、取得したZ軸カウンタ値を直線補間して、合焦ピクセルにおけるZ軸カウンタ値を推定し(S13)、推定された合焦ピクセルにおけるZ軸カウンタ値に基づいて、対象物2の面位置を検出する(S14)ので、受光される光量が飽和したときでも、合焦精度の低下を軽減することができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
クロストーク補正係数算出方法およびクロストーク補正係数算出装置およびこれを用いた三次元表面形状測定装置
【課題】 複数波長による表面形状の測定方法およびこれを用いた装置によって測定する場合に発生するクロストーク現象のクロストーク補正係数を算出する。
【解決手段】 測定対象面の平面領域内から輝度の異なる6点以上の干渉輝度信号を取得し、前記輝度信号に干渉縞モデルとクロストークモデルとの組み合わせを適合(フィッティング)することにより、クロストーク補正係数を一括して算出するクロストーク補正係数算出方法、また、該方法を実行できる装置を提供する。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
基板検査方法
【課題】本発明は複数の投影部を通して測定対象物が形成された基板を検査する検査方法を提供する。
【解決手段】本発明の基板検査方法によると、複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得し、取得された投影部別位相データを用いて基板に対する投影部別高さデータを抽出する。複数の投影部のうち信頼度が最もよい投影部を基準投影部で設定し、基準投影部の高さデータを基準にして残り投影部の高さデータを整列させる。整列された高さデータを用いて統合高さデータを抽出する。このように、信頼度が最も高い投影部を基準として残りの投影部の高さを整列させることで、統合高さデータの信頼性を向上させることができる。
(もっと読む)
101 - 120 / 1,116
[ Back to top ]