
Fターム[2F065AA24]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 高さ (1,116)
Fターム[2F065AA24]に分類される特許
21 - 40 / 1,116
ケーブルの片撚り検出方法
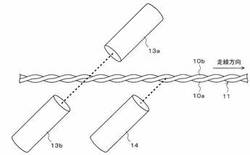
【課題】インラインで連続的に正確な検出が行え、また非接触にもかかわらずコストの増加の少ないケーブルの片撚り検出方法を提供する。
【解決手段】一対のコア10a,10bを移動させながら対撚りしてケーブル11を作製する際にインラインで連続的に片撚りを検出するケーブルの片撚り検出方法であって、ケーブル11における対撚りの山12の高さを光透過型光電センサ13a,13bで非接触にて検出することにより対撚り周期を求め、その対撚り周期の変化に基づいて片撚りの発生を検出するものである。
(もっと読む)
コヒーレンス走査干渉計及び物体の高さ形状を空間解像可能に光学的に測定するための方法

【課題】コヒーレンス走査干渉計及びこのコヒーレンス走査干渉計を用いた物体の高さ形状測定するための方法に対して、測定精度や測定特性の再現性に関する改良を行なうことである。
【解決手段】光源2と、干渉計と、経路長変更ユニットと、検出面を有するカメラ3とが備えられている。経路長変更ユニットは、測定ビームと基準ビームの光路長を変更するように構成されている。経路長変更ユニットは、経路目盛11と経路検出器12とを有しており、経路目盛11と経路検出器12とは、経路長変更ユニットによる測定ビームの光路長変更または基準ビームの光路長変更あるいはその両方の光路長変更の際に、経路検出器12の同期的な動きが経路目盛11に対して相対的に行なわれるように構成されている。
(もっと読む)
バリ取り方法
【課題】より適切なバリ取りを行うことができるバリ取り方法を提供する。
【解決手段】バリ取り方法は、ワーク上のバリの形状を計測する計測工程(S1、S2)と、計測工程で得られた計測値に基づき、バリの長さ方向に沿って所定の根元算出点における両側の根元位置を算出する根元算出工程(S3〜S11)と、根元算出工程で得られた根元位置に基づいてバリ取り工具の軌道を算出する軌道算出工程と、軌道算出工程で得られた軌道に従ってバリ取り工具を移動させながらバリ取り加工を行うバリ取り工程とを備える。
(もっと読む)
尖端バンプの高さ測定装置
【課題】 半導体チップの尖端バンプの高さを測定する。
【解決手段】 尖端バンプを含む複数の半導体チップが形成された半導体ウェハ21の上方に面照射装置33が配置されて、面照射装置33が半導体ウェハ21の上面に光を照射する。一対の撮像装置34,35が、半導体ウェハの斜め上方に配置されて、半導体ウェハ21上の尖端バンプを含む半導体チップを斜め上方から撮像する。コンピュータ36は、一対の撮像装置34,35によって撮像された一対の画像に基づいて尖端バンプの底から先端までの長さをそれぞれ検出して、前記検出した一対の長さと、一対の撮像装置34,35の光軸が半導体ウェハ21の上面となす角度を用いて尖端バンプの高さを計算する。
(もっと読む)
形状計測装置、形状計測システム、及び形状計測方法
【課題】低いコストで、広い高さ範囲を高精度に計測可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、測定物4が配置されるステージ14と、格子3を透過した第1の光、及び格子3を透過した第2の光の両方が透過する投影光学系5であって、第1の光を第1の入射角で測定物4表面に入射させ、第2の光を第2の入射角で測定物4表面に入射させる投影光学系5と、第1の光による測定物4表面の格子3の第1の変形像、及び第2の光による測定物4表面の格子3の第2の変形像に基づき、測定物4表面の高さの分布を算出する高さ分布算出部と、を備える、形状計測装置。
(もっと読む)
ボトルの液状収容物の入味検査方法及びボトル入味検査システム
【課題】検査精度を上げて入味容量のバラツキを少なくできるようにする。
【解決手段】キャップ天面高さと満注容量との相関関係を予め測定して第1相関関係情報を取得すると共に、最低充填容量を設定し、満注容量よりも所定量減量した液状収容物をボトルに充填した場合の入味線高さとキャップ天面との高低差と、所定量との相関関係を求めて第2相関関係情報を取得しておいて、被検査用ボトルに対するキャップ天面高さを計測して第1相関関係情報から満注容量を決定すると共に、満注容量と最低充填容量との差に対応する差分高さを第2相関関係情報から算出して、被検査用ボトルに対応する許容最低入味線高さを求め、液状収容物の実入味線高さを計測し、許容最低入味線高さと実入味線高さとを比較して、実入味線高さが高ければ良品と判定し、実入味線高さが低ければ不良品と判定する。
(もっと読む)
リニアインダクションモータとリアクションプレートとの隙間モニタリング装置
【課題】リアクションプレートとリニアインダクションモータとの隙間を連続的に測定する。
【解決手段】本発明のリニアインダクションモータとリアクションプレートとの隙間モニタリング装置は、リニアインダクションモータ2に該リアクションプレート4の幅方向両端部位に臨むよう各々取り付けられ、リアクションプレート4との高さを計測する複数の非接触式変位センサ3と、これら複数の非接触式変位センサ3による計測値と、所定地点のリアクションプレート4Aを通過したときに計測した該リアクションプレート4Aとの距離とを比較してリアクションプレート4とリニアインダクションモータ2とのギャップを求めるデータ処理部10と、を備える。
(もっと読む)
高さ位置検出装置およびレーザー加工機
【課題】チャックテーブルに保持された被加工物の高さ位置を正確に検出することができる高さ位置検出装置および高さ位置検出装置を装備したレーザー加工機を提供する。
【解決手段】発光源81と、強度分布を整形するNDフィルター83と、集光して被加工物Wに照射する集光器7と、第1の経路と第2の経路に導く第1のビームスプリッター84と、第3の経路と第4の経路に分光する第2のビームスプリッター86と、第3の経路に分光された反射光を受光する第1のホトデテクター88aと、第4の経路の反射光を帯状に通過させるスリット891を備えたマスク89と、マスクを通過した反射光を受光する第2のホトデテクター88bと、第1のホトデテクターによって受光した光量と第2のホトデテクターによって受光した光量との比率を求め、比率に基づいてチャックテーブル36に保持された被加工物の高さ位置を求める制御手段とを具備している。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
金属板の外観評価方法
【課題】研磨部及び再研磨部の仕上がり具合を簡単な手法で定量的に評価できる金属板の外観評価方法を提供する。
【解決手段】この金属板の外観評価方法では、金属板1の表面のデジタル画像10をスキャナ4によって取得し、デジタル画像10の一部画像11に含まれる各ピクセルのRGB値をグレースケール変換して得られるAc値の波形パターンに基づいて研磨部2及び再研磨部3の外観の可否を判断する。波形パターンを用いることで、研磨部2及び再研磨部3の外観を容易かつ定量的に判断できる。また、この方法では、波形パターンに基づいて、研磨部2及び再研磨部3の研磨方向がスキャナ4の走査方向と一致しているデジタル画像10を判断対象として選別する。この前処理により、外観判断工程で用いる波形パターンのS/N比が向上し、判断精度が高められる。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
位置検出装置、位置検出方法、露光装置、露光方法およびデバイス製造方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
位置制御システム、露光装置、及び露光方法
【課題】1つの実施形態は、例えば、基板の表面の位置の計測精度を向上できる位置制御システム、露光装置、及び露光方法を提供することを目的とする。
【解決手段】1つの実施形態によれば、面位置計測部と制御部とを有する位置制御システムが提供される。面位置計測部は、基板の表面の高さ方向の位置を計測する。制御部は、面位置計測部による計測結果に基づいて、光学系と基板の表面との相対的な位置を制御する。面位置計測部は、複数のフォーカスセンサ41−1〜41−3と駆動部42とを有する。駆動部は、基板の表面に対する複数のフォーカスセンサの基板面内方向の位置を独立して駆動する。
(もっと読む)
圧着端子検査装置および圧着端子検査方法
【課題】検査作業者の技量にかかわらず、圧着端子を精度よく検査できる、圧着端子検査装置および圧着端子検査方法を提供する。
【解決手段】圧着端子3の検査時には、検査作業者により、圧着端子検査装置1の端子配置部に圧着端子3が配置されて、圧着端子3が延伸方向に延びる軸線を中心に揺動される。この揺動中に、ハイト測定用エリアイメージセンサ14の撮像面141への圧着端子3の投影における第1測定位置Piおよび第2測定位置PwでのY軸方向寸法Yi,Ywが測定される。そして、Y軸方向寸法Ywの極小値Ywminが圧着端子3のワイヤバレル部32のクリンプハイトHwとして取得される。
(もっと読む)
21 - 40 / 1,116
[ Back to top ]