
Fターム[2F065CC01]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | プリント基板 (376)
Fターム[2F065CC01]に分類される特許
61 - 80 / 376
基板検査装置
検査精密度を向上させることのできる基板検査装置を提供する。基板検査装置は少なくとも一つの照明モジュール、結像レンズ、第1ビームスプリッタ、第1カメラ及び第2カメラを含む。照明モジュールは検査基板に光を提供し、結像レンズは検査基板から反射された光を透過させる。第1ビームスプリッタは結像レンズを透過した光のうち一部を透過させ残りを反射させる。第1カメラは第1ビームスプリッタを透過した光の印加を受けて撮像し、第2カメラは第1ビームスプリッタから反射された光の印加を受けて撮像する。このように、一つの結像レンズを用いて検査基板を検査することによって、従来の結像レンズ間の光軸または倍率偏差に起因した検査精密度の低下を防止することができる。 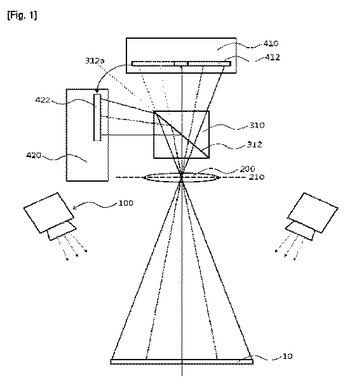 (もっと読む)
(もっと読む)
基板の破損及び移動中の基板のずれを動的に検出するセンサ
【課題】基板のずれ及び/又は破損を検出するのに必要なセンサの数を少なくし、比較的低コストで実施する。
【解決手段】移動中の基板106の少なくとも2つの平行な端部の長さに沿った、破損やずれ等の基板の欠陥の存在を検出する少なくとも2つのセンサ140A、140Bを組み込んだ装置及び方法を提供する。一実施形態において、装置は、基板の欠陥を検出するための、少なくとも2つの平行な端部近傍で、基板をセンシングするセンサ構成を含む。他の実施形態において、装置は、基板サポート表面を有するロボット114又は130と、基板の欠陥を検出するための、少なくとも2つの平行な端部近傍で、基板をセンシングするセンサ構成とを含む。
(もっと読む)
画像検査装置

【課題】画像検査装置において、被検体からの光を複数の波長帯域に分けて画像を取得して画像検査を行う場合に、簡素な構成により高精度な検査を行うことができるようにする。
【解決手段】画像検査装置50は、可視光L1と、赤外光L2とを、導体パターン2に照射する照明部4と、導体パターン2で反射された可視光L1および赤外光L2を結像する撮像光学系6と、撮像光学系6によって結像された像を撮像する撮像素子8と、導体パターン2と撮像素子8との間の光路上で進退可能に設けられ、可視光L1の透過を阻止するとともに赤外光L2を透過させる可視光カットフィルタ7bと、導体パターン2と撮像光学系6との間の光路上で進退可能に設けられ、赤外光L2の透過を阻止するとともに可視光L1を透過させる赤外光カットフィルタ7aと、を備える。
(もっと読む)
データ生成方法および画像検査方法
【課題】ビットマップ画像における図形の輪郭線に関するデータを高速かつ正確に生成するデータ生成方法および、このデータ生成方法を用いた画像検査方法を実現する。
【解決手段】図形の輪郭線に関するデータを生成する処理を演算処理装置により実行するデータ生成方法は、設計上の図形の中心線をビットマップ画像に重ね合わせるステップと、中心線が重ね合わされたビットマップ画像上において、中心線上に位置する各探索基準点について所定の探査方向に向かって中心線上に位置するビットの色とは異なる色のビットを探索し、検出したビットを輪郭候補点とするステップと、各探索基準点に対して、輪郭候補点の中から当該探索基準点からの距離が最短となるもの抽出してこれを所望の図形の輪郭を構成する輪郭点とするステップと、対応する探索基準点の配列順に輪郭点間を結線したラインを輪郭線として確定して輪郭線に関するデータを出力するステップと、を備える。
(もっと読む)
三次元形状測定装置
【課題】 連続移動する測定対象物の三次元形状を、位相シフト法により高速に測定すると共に、垂直解像度や深度を柔軟に設定できる構成とする。
【解決手段】
被測定対象物に対して斜め上方から、投影方向に沿って光の強度が正弦波状に変化する格子縞を投影する格子縞投影器1と、鉛直上方に位置しエリアセンサ6を備えたカメラ2と、被測定対象物を一定方向へ移動させるステージ3とを備え、格子縞は位相が互いにπ/2ずつシフトした4つの帯状領域に分かれており、エリアセンサ6上の各帯状領域につき一本の水平ライン、計4本から画像を読出し、位相シフト法の原理を用いて位相を算出して高さに変換し、被測定対象物の三次元形状を測定する。
(もっと読む)
検査装置および配線回路基板の検査方法
【課題】導体パターンの良否を精度よく検査することのできる検査装置および配線回路基板の検査方法を提供する。
【解決手段】回路付サスペンション基板の金属支持層21および導体パターンに入射する入射光7を発光する発光部2と、入射光7が金属支持層21および導体パターンにおいて反射された反射光11を受光する受光部4とを備え、発光部2および受光部4は、入射光軸13と反射光軸14とが一致するように配置され、発光部2は、入射光軸13と同一直線上にある直線光8と、回路付サスペンション基板に向かうに従って集光され、入射光軸13に対して傾斜する傾斜光9とを含む入射光7を発光する。
(もっと読む)
アライメントマークの検出方法
【課題】エッジ検出により、見え方が多種多様なワーク・アライメントマーク(ワークマーク)のパターンの位置を、正しく検出できるようにすること。
【解決手段】アライメント顕微鏡によりワークマークのパターンの画像を受像し、この画像を制御部に送る。制御部では、取得したパターンの画像[(a)(d)]の中心付近から複数の放射方向について、距離に対する輝度の分布を求める[(b)]。そして、求めた輝度分布を微分し、距離に対する輝度の変化である微分値を求め[(c)]、微分値の極大値の位置を、各放射方向について求める。求めた極大値の位置を、それぞれ一つずつ抽出して組み合わせ、極大値の位置を通る閉曲線に近似した円を複数求める。この複数の円の半径と、ワーク・アライメントマークの半径とを比較し、上記複数の円のなかから半径が最も近い円を選択し、その円の中心位置をワーク・アライメントマークの位置とする。
(もっと読む)
レーザ視準校正システム
【課題】 視準校正のための誤差を高精度、容易かつ短時間に確認できるレーザ視準校正システムを提供すること。
【解決手段】 レーザ視準校正システム1は、視準校正のための誤差69を算出及び表示する。レーザ視準校正システム1は、レーザユニット10が配設され、レーザ光線の照準を設定するためのレチクル20aを有する照準ユニット20と、レチクル20aに対応するレチクル30aを有し、レチクル20aがレチクル30aと同軸上に配設され、レチクル20aとレチクル30aとによって照準が設定された状態でレーザ光線を受光する受光ユニット30と、照準が設定された状態で、受光ユニット30が受光したレーザ光線の受光ユニット30における受光位置を基に、レーザ光軸の視準校正のための誤差69を算出し、算出された誤差を表示する算出表示ユニット50とを有している。
(もっと読む)
ナノインプリント成型積層体の検査方法
【課題】ナノインプリント成型積層体の欠陥検査や膜厚測定を簡便かつ迅速に、非破壊で行うことが可能な検査方法を提供すること。
【解決手段】本発明の検査方法は、鋳型モールドを用いるナノインプリント法により成型されたレジスト材料からなる膜層を有する基板に対して、レジスト材料を発光させる励起波長の光を照射し、基板上の成型されたレジスト材料からなる膜層からの発光を発光パターン画像として取得する工程(1)と、該発光パターン画像を、成型に用いた鋳型モールドのパターン画像又は同一鋳型モールドで繰り返し成型した該発光パターン画像と異なる発光パターン画像と比較し、画像の相違点を欠陥として検出する欠陥検出工程(2)及び/又は、該発光パターン画像を発光強度により解析し、発光強度の値から膜厚を測定する膜厚測定工程(3)とを含み、半導体、配線基板、電子デバイス、光学デバイス等の製造における品質管理に有用である。
(もっと読む)
異常領域検出装置および異常領域検出方法
【課題】高次局所自己相関特徴を用いて異常の有無と共にその位置を高い精度で検出できる高速かつ汎用的な異常領域検出装置を提供すること。
【解決手段】異常領域検出装置は、画像データから画素毎に高次局所自己相関によって特徴データを抽出する手段、画素毎に、その画素を含む所定の範囲の画素群について特徴データを加算する手段、正常領域を示す部分空間に対する特徴データの異常さを示す指標を計算する手段、指標に基づき異常判定する手段、異常と判定した画素位置を出力する手段とを備える。変位幅の異なる複数の高次局所自己相関特徴データを抽出してもよい。更に、特徴データから主成分分析手法により主成分ベクトルに基づく正常領域を示す部分空間を求める手段を備えていてもよい。画素対応に異常判定が可能であり、異常領域の位置を正確に検出可能である。
(もっと読む)
部品の実装装置および部品の実装方法
【課題】実装対象の部品を接合用材料を間にして所定の実装領域に搭載した際に、接合用材料の所定状態を安定的に得るための部品の実装手法を提供する。
【解決手段】部品の実装工程では、接合用材料形成工程S1と、部品搭載工程S2と、はみ出し状態検出工程S3と、形状パターン更新工程S4とを含む。接合用材料形成工程S1では、部品の実装領域に、接合用材料を、所定の形状パターンでもって形成する。部品搭載工程S2では、実装領域に接合用材料を間にして部品を搭載する。はみ出し状態検出工程S3では、部品搭載後に、実装領域から実装領域の外側にはみ出している接合用材料のはみ出し状態を検出する。形状パターン更新工程S4では、実装領域に形成する接合用材料の形状パターンの設定を、検出された接合用材料のはみ出し状態に応じた形状パターンに更新する。
(もっと読む)
検査パラメータ設定方法、検査性評価方法および検査システム
【課題】高多層プリント配線基板の配線パターンを検査する際に誤報告の少ないキャリブレーション位置を決定すると共に、その検査性を評価しベリファイ作業時間を予測することができる検査システムを提供する。
【解決手段】検査システムにおいて、検査対象のプリント配線基板を構成する各層のCADデータとその層構成情報を元に検査面より透視した輝度成分マップを生成する。そして検査面を構成する輝度成分の組を求め、全組を網羅する1つ以上の輝度評価領域を決定した後、検査装置にて領域を撮像、各輝度成分に対応する統計輝度値を求め輝度成分マップに代入し、検査閾値を決定するための最適キャリブレーション位置を求め検査を行う。
(もっと読む)
オーバレイ測定方法、リソグラフィ装置、検査装置、処理装置、及びリソグラフィ処理セル
【課題】オーバレイ測定を向上させる。
【解決手段】生成物マーカ格子の非対称性などの生成物マーカ格子の横プロファイルに関する情報が測定結果から判定される。オーバレイマーカ格子がレジスト膜に印刷された後、生成物マーカ格子に対するオーバレイマーカ格子の横オーバレイがスキャトロメータによって、且つ適宜の処理モデルと組み合わせた判定済みの非対称情報を使用して測定される。アライメントセンサの情報を使用して、先ず生成物格子を再構築してもよく、この情報はスキャトロメータに送られ、スキャトロメータは生成物とレジスト格子との積層を測定し、積層によって散乱された光は、オーバレイを計算するために積層のモデルを再構築するために利用される。
(もっと読む)
アライメント装置、この装置を備えた実装装置およびアライメント方法
【課題】ヘッドの回転に影響されることなく実装対象物および被実装対象物にそれぞれ設けられたアライメントマークを上方から認識手段により読取りつつ、ヘッドを回転することにより実装対象物および被実装対象物の回転方向における相対的な位置調整を行うことができる技術を提供する。
【解決手段】空間OSにヘッド2と非接触状態で2視野光学系レンズ14aが挿入されてアライメントマーク20a,22aが上方から光学的に読取られるため、ヘッド2が回転しても、2視野光学系レンズ14aによる光路の変換方向がCCDカメラ14bに向かう方向からずれないため、ヘッド2の回転の影響を受けることなくアライメントマーク20a,22aを上方から上下マーク認識手段14により読取りつつ、部品20および基板22の回転方向における相対的な位置調整を行うことができる。
(もっと読む)
3次元形状測定装置および測定方法
【課題】3次元形状測定装置および測定方法を提供すること。
【解決手段】3次元形状測定装置は、光源および格子素子を含み、前記格子素子をn回移送させて移送ごとに測定対象物に格子パターン照明を投影するm個の投影部と、前記測定対象物で反射される格子パターン画像を撮影する結像部と、前記m個の投影部のうち、いずれか一つの投影部を用いて前記格子パターン画像を撮影する間に、少なくとも一つの他の投影部の格子素子が移送されるように制御する制御部と、を含む。これにより、3次元形状の測定時間を短縮させることができる。
(もっと読む)
電子機器
【課題】 光ファイバーセンサを機器内部に設けて、機器内部の歪みおよび温度を直接的に計測可能とした、電子機器を得ることを目的とする。
【解決手段】 筐体と、上記筐体の内部に、互いに間隔を空けて収納される複数の基板と、上記各基板の表面にそれぞれ固着され、温度計測用のファイバーグレーティングと歪み計測用のファイバーグレーティングとを複数個所有し、上記基板に一筆書きで配線された光ファイバーセンサとを備えて、電子機器を構成する。
(もっと読む)
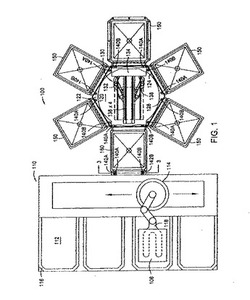
多数のエリアアレイ型画像検出器を使用するヘッド搭載部品アライメント
【課題】ピック・アンド・プレイス機械のノズルに保持されたときに部品のオフセットおよび方向を検知するセンサを提供する。
【解決手段】センサは、複数の2次元カメラ300と、バックライト照明装置306と、コントローラ308とを含む。各カメラはピック・アンド・プレイス機械のノズルを含む視野を有する。バックライト照明装置は照明を複数の2次元カメラに向けるように構成されている。バックライト照明装置は複数の2次元カメラからノズルの反対側に位置決めされている。コントローラは複数の2次元カメラおよびバックライト照明装置に接続されている。コントローラは、複数の2次元カメラによって検出された、バックライトで照らされた複数の影の画像に基づいて(複数の)部品302のオフセットおよび方向情報を決定するように構成されている。コントローラはオフセットおよび方向情報をピック・アンド・プレイス機械のコントローラに供給する。
(もっと読む)
マーク位置検出装置及びマーク位置検出方法、それを用いた露光装置及びデバイスの製造方法
【課題】ウエハのアライメントを行う際に、精度の向上と共に処理時間の短縮を図る。
【解決手段】露光装置において基板に設けられたマークの位置を検出するマーク位置検出装置であって、解像度及び読み出し領域が変更可能な撮像素子と、マークから反射される光を撮像素子に導く光学系と、撮像素子の出力に基づいてマークの位置を検出する制御手段とを有し、該制御手段は、第1の解像度及び第1の読み出し領域に設定された撮像素子の出力に基づいて第1の位置検出S32を行い、該第1の位置検出S32の結果に基づいて第1の読み出し領域よりも狭範囲で、かつ第1の読み出し領域内にある第2の読み出し領域に設定し、第1の解像度よりも高解像な第2の解像度及び第2の読み出し領域に設定された撮像素子の出力に基づいて第2の位置検出S39を行う。
(もっと読む)
表面検査装置および表面検査方法
【課題】照明光を短波長化しなくても、確実に繰り返しピッチの微細化に対応できる表面検査装置および表面検査方法を提供する。
【解決手段】被検基板20の表面に形成された繰り返しパターンを直線偏光L1により照明する手段13と、表面における直線偏光L1の振動面の方向と繰り返しパターンの繰り返し方向との成す角度を斜めに設定する手段11,12と、繰り返しパターンから正反射方向に発生した光L2のうち、直線偏光L1の振動面に垂直な偏光成分L4を抽出する手段38と、偏光成分L4の光強度に基づいて、繰り返しパターンの欠陥を検出する手段39,15とを備える。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、および三次元形状計測プログラム
【課題】計測レンジを維持しつつ、計測可能な高さを簡便に拡張する。
【解決手段】計測対象に投影された、位置に応じて周期的に輝度が変化する光パタンを解析することによって、計測対象の三次元形状を計測する三次元形状計測システムは、計測対象の高さの基準面を有する取付台に計測対象が取り付けられ、計測ヘッドが計測対象および基準面に光パタンを投影して撮像し、変位部が計測ヘッドを高さ方向へ変位させる。撮像された画像の或る画素における光パタンの位相を位相算出部75が算出し、算出された位相に基づいて高さ算出部77が計測対象の高さを算出し、算出された高さに基づいて送り量算出部78が変位部を変位させるべき変位量を算出する。高さ算出部77は、位相算出部75が算出した位相に基づいて高さを算出し、算出した高さを、変位量に基づいて補正することにより、計測対象の高さを算出する。
(もっと読む)
61 - 80 / 376
[ Back to top ]