
Fターム[2F065HH14]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 入射方向 (4,392) | 複数方向 (691)
Fターム[2F065HH14]に分類される特許
41 - 60 / 691
3次元計測装置、および3次元計測方法
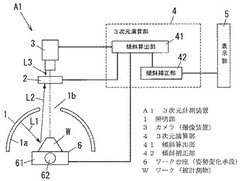
【課題】偏光解析を用いながら、複数の傾斜面の各傾斜方向の違いを識別できる3次元計測装置、および3次元計測方法を提供する。
【解決手段】3次元演算部4の傾斜算出部41は、ワーク台座6によってカメラ3の撮像方向とワークWの表面との相対角度を第1の状態に設定してカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第1の傾斜角および第1の方位角を求め、ワーク台座6によって相対角度を第1の状態から第2の状態に変化させた後にカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第2の傾斜角および第2の方位角を求め、傾斜補正部42は、第1の傾斜角と第2の傾斜角との差に基づいて、第1の傾斜角または第1の方位角を補正する。
(もっと読む)
指向エネルギーシステム

【課題】複数のエネルギー放射源を使用する指向エネルギーシステムにおいて、それぞれのエネルギー放射源から出力されるエネルギー束を目標に当てるための好適な制御を提供する。
【解決手段】指向エネルギーシステム(1)は、複数のレーザ光源(10)と、複数の指向装置(20)と、目標情報取得装置(30)と、制御装置(40)とを備える。複数の指向装置(20)は、複数のレーザ光源(10)のそれぞれから出力されるレーザビーム(11)の照射方向を変える。目標情報取得装置(30)は、目標(100)の方向を特定するための情報を含む目標情報(TAR)を取得する。制御装置(40)は、複数のレーザ光源(10)のそれぞれから出力されるレーザビーム(11)が目標(100)に照射されるように、目標情報(TAR)に基づいて複数の指向装置(20)を制御する。
(もっと読む)
位置検出装置、入力機能付き表示システムおよび位置検出方法
【課題】検出光が対象物体以外の物体で反射して受光部に入射することに起因する検出誤差の発生を防止することのできる位置検出装置、該位置検出装置を備えた入力機能付き表示システム、および位置検出方法を提供すること。
【解決手段】位置検出装置10において、位置検出の際、受光部13は、対象物体Obで反射した検出光L2を受光するとともに、検出光L2が対象物体以外の物体Sbで反射した検出光(迷光L5)も受光する。ここで、迷光L5の強度は、検出光L2の強度に比例する。そこで、検出対象空間10Rを介さずに受光部13に入射する補償光L4を出射する補償用光源部14を設け、検出光L2の強度を増大させたときには、補償光L4の強度を低減し、検出光L2の強度を低減させたときには、補償光L4の強度を増大させる。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光部に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、制御用IC70が第1駆動ライン125Aおよび第2駆動ライン125Bを介して光源部12に高周波数の駆動パルスを順次供給すると、光源部12からは検出光L2が放射状に出射される。その際、受光部13は、検出光L2が出射された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光学式位置検出装置10には、受光部13を複数の光源120、駆動ライン(第1駆動ライン125A、第2駆動ライン125B)、および制御用IC70から電気的にシールドするシールド部材16が設けられている。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、およびかかる光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源部12では、フレキシブル配線基板181を利用して、発光素子120が位置する角度方向には発光素子120と受光部13との間に遮光部185が設けられており、発光素子120の間に透光部186が設けられている。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
光学式検出装置、表示システム及び情報処理システム
【課題】従来よりも小型な構成で対象物の位置を検出することができる光学式検出装置、表示システム及び情報処理システム等を提供すること。
【解決手段】光学式検出装置100は、照射光LTを出射する照射部EUと、照射光LTが検出エリアRDETに存在する対象物OBに反射されることによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて対象物OBの位置情報を検出する検出部110とを含む。照射部EUは、照射部EUの一端から検出エリアRDETに対して出射される第1の照射光と、照射部EUの他端から検出エリアRDETに対して出射される第2の照射光と、照射部EUの一端と他端との中間部から検出エリアRDETに対して出射される第3の照射光とがそれぞれに交差し、且つ、第1、第2、及び第3の照射光のそれぞれの強度が異なるように、照射光LTを出射する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、光源部12が検出光L2をXY面に沿って放射状に出射した際、第1受光部13は、検出対象空間10Rに位置する対象物体Obで反射された検出光L2を受光し、第1受光部13での受光強度に基づいて対象物体ObのXY座標データを検出する。第1受光部13に対してZ軸方向で離間する位置には第2受光部14が設けられ、かかる第2受光部14も、対象物体Obで反射された検出光L2を受光する。その際、第1受光部13での受光強度と、第2受光部14での受光強度との差や比等の比較結果は、対象物体ObのZ軸方向の位置によって変化するので、かかる比較結果に基づいて対象物体ObのZ軸方向の位置を検出する。
(もっと読む)
タイヤ形状検査装置、及びタイヤ形状検査方法
【課題】ショルダ部を含めてタイヤの表面形状を検出することができるようにする。
【解決手段】タイヤ形状検査装置は、タイヤのトレッド部8に対してライン光を照射する第1ライン光照射手段10と、タイヤのサイドウォール部7に対してライン光を照射する第2ライン光照射手段12と、タイヤのショルダ部9から当該ショルダ部9を超えた領域までライン光を照射する第3ライン光照射手段13と、第1ライン光照射手段10、第2照射手段及び第3ライン光照射手段13が照射してタイヤ表面で反射したライン光を撮像する撮像手段16とを備える。
(もっと読む)
位置検出システム及び投射型表示システム
【課題】複数の検出対象物の位置をそれぞれ検出することができる光学式の位置検出システムを提供する。
【解決手段】光学式の位置検出システム1000は、第1検出対象物31と第2検出対象物32とに向けて光を射出する光射出部20と、波長の異なる第1検出対象物31からの第1反射光41を受光する第1受光部51と第2検出対象物32からの第2反射光42を受光する第2受光部52を有し、前記第1検出対象物31は前記第1反射光41を反射する第1反射フィルター61を有し、前記第2検出対象物32は前記第2反射光42を反射する第2反射フィルター62を有する。
(もっと読む)
面形成支援システム、面形成支援装置、及び面形成支援プログラム
【課題】本発明は、施工作業に要する時間を短縮させることができる面形成支援システム、面形成支援装置、及び面形成支援プログラムを提供する。
【解決手段】仮想空間において、予め定められた目標面に表示された所定画像を予め設定した複数の撮影位置から予め設定した撮影方向に向けて仮想的に撮影することにより得られる撮影位置毎の画像情報を生成する情報生成装置と、実空間において、目標面に対する複数の撮影位置と同一の位置関係になるよう各々設置され、対応する画像情報により示される画像を、前記目標面を形成する際の基礎となる基礎面に、対応する撮影方向に向けて投影する複数の投影装置と、を備えた。
(もっと読む)
半導体装置の製造方法
【課題】薄型化したチップをダイボンディングする工程において、ウエハシートからチップをピックアップする際に、ピックアップ対象のチップを正確に認識できる技術を提供する。
【解決手段】カメラCAM1は鏡筒KT1の一端と接続され、鏡筒KT1の他端には対物レンズが取り付けられ、この対物レンズを通してチップ1Cの主面の画像を撮影する構成とし、鏡筒KT1とチップ1Cとの間には、面発光照明SSL1、拡散板KB1およびハーフミラーTK1を内部に備え、カメラCAM1と同じ光軸でチップ1Cの主面に光を照射する同軸落射照明の機能を有する鏡筒KT2を配置する。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
テーピング装置
【課題】。
【解決手段】照明装置100を構成する一対の照明装置100A、100Bの複数のLED101が収納溝4B内のチップ部品Aに光を拡散板102を介して均一に照射して、しかもチップ部品Aに付された丸の部分AAや文字・数字部分ABを形成する刻印の深さに応じて、確実に照射光によって前記刻印の端部により影ができるような傾斜した照射光となるように照射して、印字検査カメラ85が撮像した画像において、丸の部分AAや文字・数字部分ABとそれ以外の表面部分ACとのコトラストが大きくなって、丸の部分AAや文字・数字部分ABが黒色に、それ以外の表面部分ACは白色に撮像でき、チップ部品Aの有無、前記チップ部品の表裏、チップ部品Aの向きを検査することができる。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
印刷半田検査装置
【課題】半田の撮像画像の欠落を無くすことが可能な印刷半田検査装置を提供することにある。
【解決手段】印刷半田検査装置の撮像素子70は、走査方向の垂線に対してなす角θが0度を超え90度未満となるように傾けられ、その撮像領域の長手方向とスリット照明の長手方向が平行となるように照射し走査したとき、そのときの角度を存在率の低いもしくは存在しない長方形や楕円形等の前記半田の回転角度に設定されている。これにより、照射光の長手方向中心軸と、半田の短手方向中心軸を平行にならないようにし、明るさが落ち込む場所が非常に長くなる現象の発生を防ぎ、また、サチュレーション部の欠落画像の補間を可能となる。
(もっと読む)
溶接ビード切削幅測定方法
【課題】切削部の境界が明確に検出できる溶接ビード切削幅測定方法を提供する。
【解決手段】溶接ビード切削部11を照明装置で照射し、照射された領域をカメラ3で撮影し、その撮影画像を画像処理装置4で処理して溶接ビード切削幅を測定する溶接ビード切削幅測定方法において、前記照明装置として、溶接ビード切削部に対し左側から照射する左側照明装置1と右側から照射する右側照明装置2との2つを用い、左側からの照射と右側からの照射を交互に行う。
(もっと読む)
溶接ビード切削幅測定方法
【課題】切削部の撮影画像が不明瞭なものとなる場合にも、溶接ビート切削幅の測定の信頼性を向上させうる撮影画像データ処理方法を提供する。
【解決手段】照明光をエリア光とし、該エリア光による測定領域の照明輝度をビード長手方向で相異なる三輝度とし、これら三輝度の各領域(A,B,C各部)の撮影画像を同時に画像処理して溶接ビード切削幅を測定する。
(もっと読む)
41 - 60 / 691
[ Back to top ]