
Fターム[2F065JJ08]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894) | 被測定物に対し斜め (917)
Fターム[2F065JJ08]に分類される特許
81 - 100 / 917
画像形成装置および画像形成方法ならびに部品実装装置
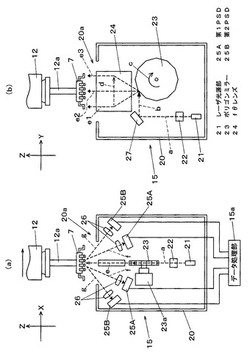
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム

【課題】安価に測定誤差を校正し高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこれをZ軸方向の位置情報として出力する位置制御部と、画像及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラの所定の撮像タイミングで位置情報を取得保持し、画像測定機は、合焦軸方向に沿って移動速度及び移動方向の少なくとも一つが異なるように複数回のAFサーチを行い、各AFサーチのカメラからの画像情報及び位置制御部からの位置情報に基づき撮像タイミングと位置情報の取得タイミングとのずれ量を求め、このずれ量に基づいてAFサーチで求められた合焦位置を補正する。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこの合焦位置をZ軸方向の位置情報として出力する位置制御部と、画像情報及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラによるワークの撮像期間における所定のタイミングで、カメラ及び位置制御部のいずれか一方から他方に出力されるトリガ信号に基づき位置情報を取得保持し、画像測定機は、カメラから転送された画像情報及び位置制御部から出力された位置情報に基づき画像情報のZ軸方向の位置情報を算出し、算出された位置情報を用いてオートフォーカス制御を行う。
(もっと読む)
尾端クロップ検出装置及び熱間圧延設備
【課題】費用面及びメンテナンス面で好適な構成で、適切に尾端クロップを検出することができる尾端クロップ検出装置およびそれを備えた熱間圧延設備を提供する。
【解決手段】熱間圧延ライン外に、熱間圧延ラインの仕上圧延スタンド間(F3−F4間)を通過する被圧延材7を連続的に撮像するカメラ11を設置する。そして、カメラ11で撮像した被圧延材7の連続画像から被圧延材7の尾端画像を検出し、その尾端画像から被圧延材7の尾端のエッジ部を抽出する。さらに、そのエッジ画像に対して画角合わせ処理を施すことで、圧延方向に対して斜めから見たエッジ画像を圧延方向に対して直交する方向から見た画像に変換し、被圧延材7の尾端クロップ形状を認識する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
タイヤトレッド面の断面形状ならびにトレッド溝の深さを測定する測定装置。
【課題】タイヤのトレッド面の断面形状とトレッド溝の深さを非接触で高速で測定する装置
【解決手段】この発明は、タイヤのトレッド面の断面形状を測定して、測定結果からトレッド溝の深さを計測する装置であり、タイヤのトレッド面近くに幅方向に並置するガイド機構と、トレッド面を単一光で照射する光源装置と、単一光の反射輝点を撮影するデジタルカメラと、光源装置並びにデジタルカメラをガイド機構に沿って移動させながら反射輝点を撮影する制御装置と撮影された画像データからトレッド面断面形状とトレッド溝の深さを測定する手段を備えたことを特徴とする。
(もっと読む)
三次元形状計測装置
【課題】段差部毎に撮像部を設置しなくても、各段差部の三次元形状を精度良く計測する。
【解決手段】受光素子21Pは、サンプルSPからの反射光を受光する。レンズ22Lは、中心線側の段差部WA1からの反射光(光軸がR1)を結像して受光素子21Pに導く。また、レンズ22Lは、段差部WA1よりも外側の段差部WA2からの反射光(光軸がR2)を、ミラー231,232を介して結像して受光素子21Pに導く。撮像部21の光軸LAは、段差部WA1からの反射光の光軸R1の受光素子21Pまでの光学距離と、段差部WA2からの反射光の光軸R2の受光素子21Pまでの光学距離とが等しくなるように、サンプルSPに対する仰角及び方位角が設定されている。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 赤外光の周波数帯域の画像を撮像することで、対象物の像を適切に撮像し、対
象物の位置検出精度を向上させる位置検出システム、表示システム及び情報処理システム
等を提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面に設定された検出エリアでの対象物の座標情報
を求める座標演算部430と、を含み、検出エリアには、赤外光の周波数帯域の照射光が
出射され、撮像部500は、撮像画像として赤外光の周波数帯域の画像である赤外光帯域
画像を撮像し、座標演算部430は、赤外光帯域画像に基づいて、対象物の座標情報を求
める。
(もっと読む)
基板検査装置および基板検査システムならびに基板検査結果の確認用画面の表示方法
【課題】部品およびはんだに対する3次元計測結果に基づく検査の結果や検査対象部位の状態を、ユーザが容易に確認できるような表示を行い、検査結果の確認作業を支援する。
【解決手段】基板上の部品およびはんだに、それぞれ異なる手法の3次元計測を実施し、それぞれの計測により得た3次元情報をはんだ付け部毎および種別毎に読出可能に蓄積する。そして、これらの蓄積情報に基づき、はんだ付け部位毎に部品とはんだとの関係を表す画像を生成し、この画像を含む画面を検査結果の確認用の画面として表示する。好ましい確認用画面では、はんだの3次元情報が表す立体形状を部品のはんだへの接合面の近傍位置で切断した場合に得られるはんだの断面を正面として、このはんだの断面と部品との関係を示す画像(YZ図またはXZ図)が表示される。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
三次元表面の計測装置及び方法
【課題】光学的フーリエ変換を採用し、CMP用研磨パッドの複雑な表面形状を実時間でそのまま定量的に評価可能にする。
【解決手段】評価すべき三次元の微小凹凸面の上に溶液を介して溶液層定常化基板を載置する。レーザ照射部は、溶液層定常化基板を通して単一波長光のレーザ光を微小凹凸面に照射する。微小凹凸面から散乱及び回折した光を光学的にフーリエ変換したフーリエ変換像をフーリエ変換像取得部で取得する。このフーリエ変換像を、信号変換器により光強度分布として電気信号に光電変換する。この取得した光強度分布の波形を、基本波数及び少なくとも一つの高調波数に分解したそれぞれの波長とその振幅をスペクトル情報として抽出して、三次元の微小凹凸面の形状を評価する。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
形状測定装置
【課題】光切断法を用いた形状測定装置の投光手段または撮影手段に付着した異物を容易に検出する技術を提供する。
【解決手段】被測定物Wにスリット光を投光する投光手段1,2と、撮像面を有し、スリット光が投光された被測定物Wを撮影する撮影手段3,4と、撮影手段3,4により撮影された画像の中のスリット光の像である光切断線に基づいて被測定物Wの形状を算出する形状算出部と、を備えた形状測定装置Aは、スリット光が直線として投光される面を有する被測定物Wにそのスリット光が投光された状態で撮影された画像の中の光切断線の連続性を判定することにより投光手段1,2または撮影手段3,4に付着した異物の有無を判定する。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
高さ測定方法および電子ビーム描画装置
【課題】試料の高さを正確に測定することのできる高さ測定方法と、高さを正確に測定して高い精度で描画することのできる電子ビーム描画装置とを提供する。
【解決手段】光の波長を所定値としたときの反射光の光量を測定し、光量が閾値以下である場合には光の波長を変えて反射光の光量を測定する工程を繰り返し、光量が閾値より大きくなる波長で試料の高さを測定する。あるいは、光の波長を変えて反射光の光量を測定し、光量が最大となる波長で試料の高さを測定する。
(もっと読む)
81 - 100 / 917
[ Back to top ]