
Fターム[2F065JJ08]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894) | 被測定物に対し斜め (917)
Fターム[2F065JJ08]に分類される特許
121 - 140 / 917
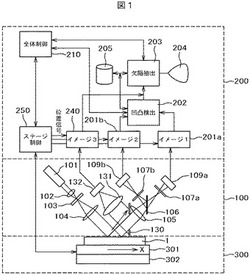
鏡面検査方法及びその装置
【課題】
鏡面検査装置において,高感度にかつ定量的に表面の凹凸を検出することが,困難であった。
【解決手段】
光源から発射された照明光を略平行光にして鏡面状の表面を有する試料に照射し、照明光が照射された試料からの反射光を集光レンズで集光し、集光レンズで集光した試料からの反射光をピンホールを通過させて反射光以外の光を遮光し、ピンホールを通過した試料からの反射光を集光レンズの焦点位置からずれた位置に配置された検出器で検出し、検出器で検出した信号を処理する鏡面検査方法において、検出器はピンホールを通過した試料からの反射光を異なる複数の条件で検出し、検出器で異なる複数の条件で検出した反射光の検出信号を用いて試料上の局所的な凹凸度の分布を検出するようにした。
(もっと読む)
トナー量計測装置及び画像形成装置

【課題】中間転写ベルト等の像担持体上に形成されたトナーパッチ等のトナー像のトナー量を精度よくしかも安定して検知する。
【解決手段】トナー量計測装置は中間転写ベルト7に向けて光を照射する発光素子16aと、中間転写ベルト7上のトナー像で反射された反射光を受光する受光素子16bとを有している。トナー量計測装置は反射光の光量に応じてトナー像のトナー量を算出する。発光素子16aと中間転写ベルト7上における光の照射位置とを結ぶ直線と、照射位置と受光素子16bとを結ぶ直線とのなす角度が15度以内となるように、受光素子16bが配置されている。
(もっと読む)
架線位置測定装置
【課題】効率よく正確に架線の位置を測定することができる架線位置測定装置を提供する。
【解決手段】架線位置測定装置において、架線を撮影する第1のラインセンサカメラ1及び第2のラインセンサカメラ2と、架線までの距離を計測するレーザ距離計3と、第1のラインセンサカメラ及び第2のラインセンサカメラから出力された画像データを基にラインセンサ画像上の架線の位置情報を算出する第1の画像処理部10及び第2の画像処理部11と、ラインセンサ画像上の架線の位置情報とレーザ距離計3から出力された距離情報とを記憶する処理メモリ12と、ラインセンサ画像上の架線の位置情報と距離情報とに基づきステレオ対応点の探索を行うステレオ対応点探索部13と、探索したステレオ対応点に基づき架線の高さと偏位を算出する高さ・偏位算出部14とを備えた。
(もっと読む)
撮像装置
【課題】 ピントが合わせやすく、しかも、ワークやラインカメラの移動に伴う振動があってもうねりをはっきり撮像できる撮像装置を提供する。
【解決手段】撮像装置1は、ワークαに対して80°の入射角度で線状光がワークαに当たるように光源装置20を配置し、その反射光をエリアカメラ31で撮像できるようにカメラユニット30を配置している。撮像装置1は、ラインカメラのように線ではなく、エリアカメラ31の撮像面で面により反射光を捉えているので、ピントが合わせやすく、しかも、エリアカメラ31の場合、一定の幅で画像を取り込むことで、ハイライト部分が若干移動しても確実にハイライト部分を受光できるので、明るさが一定した均質な画像が得られる。従って、撮像装置1を用いると、ラインカメラを用いた撮像装置に比べて、ピントが合わせやすく、光量むらを発生させずにワークαの外部表面をうねりが分かるように二次元的に撮像できる。
(もっと読む)
三次元形状計測装置、三次元形状計測装置のキャリブレーション方法、およびロボット装置
【課題】複数の方向から計測対象物体を撮像して三次元形状を計測する三次元形状計測装置のキャリブレーションを、簡便な作業で短時間に行う。
【解決手段】三次元形状計測装置1は、キャリブレーション用ブロックと、撮像部12−1,12−2がそれぞれ撮像した撮像画像領域から、キャリブレーション用ブロックの上面に照射されたスリット光による光切断線をそれぞれ検出する光切断線検出部23と、光切断線検出部23がそれぞれ検出した光切断線から特徴点をそれぞれ検出して二次元座標値を取得する特徴点検出部24と、二つの撮像画像領域それぞれにおける特徴点の二次元座標値を単一の二次元座標系の二次元座標値に変換するための座標変換パラメーターを計算する座標変換パラメーター計算部25とを備えた。
(もっと読む)
溶接表面の欠陥検査方法
【課題】溶接部表面の溶接欠陥を短時間かつ定量的に検査可能である溶接表面の欠陥検査方法を提供する。
【解決手段】被検査物であるワーク1の溶接部6表面に発生した溶接欠陥2を検査するための溶接表面の欠陥検査方法であって、画像撮像手段であるカメラ3により前記ワーク1の溶接部6表面の画像を撮像し、当該撮像された画像の濃淡判別を行って、前記溶接部6表面における溶接欠陥2の位置を検出する溶接欠陥検出工程と、前記溶接部6表面の同一位置にある溶接欠陥2に対して複数のレーザ変位計4a、4bを用いて変位量を測定する変位量測定工程と、を有する。
(もっと読む)
基板検査方法及び装置
【課題】マスク基板に対して洗浄加工を行なった場合の洗浄加工後にマスク基板に残る欠陥が洗浄加工プロセスによるものなのか、マスク基板自体の内部欠陥によるものなかを容易に判定する。
【解決手段】第1及び第2の受光手段に受光された散乱光に基づいて基板の両面(表面及び裏面)に存在する欠陥を検出することができるので、基板の洗浄加工の前後で両面の欠陥の存在位置をそれぞれ比較することによって、洗浄加工によって基板両面に存在していた欠陥が除去されたか否かを容易に判定することができる。すなわち、基板の洗浄加工処理によって基板から所定数の欠陥が除去されなかった場合には、マスク基板の内部に欠陥が存在する可能性が高いので、基板内部の欠陥の検出処理行い。その結果に基づいて洗浄加工によって除去できなかった欠陥が基板内部の欠陥であるのか、洗浄加工プロセスの問題によるものかを容易に判定することができるようになる。
(もっと読む)
計測装置
【課題】被検物の温度管理を行って高精度の形状測定が行える計測装置を提供すること。
【解決手段】被検物の形状を測定する計測装置であって、前記被検物の形状情報を採取する検出手段と、前記被検物の温度を計測する温度計測手段と、前記被検物の温度を調整する気体流を形成する気体流形成手段と、前記温度計測手段からの情報に基づいて、前記気体流形成手段を制御して、前記被検物の温度を所定温度範囲に保持する温度制御手段と、を備える。
(もっと読む)
三次元形状計測装置、キャリブレーション方法、およびロボット
【課題】三次元形状計測における高さ方向のキャリブレーションを効率的に且つ高精度に行う。
【解決手段】階段形状のキャリブレーション用ブロックと、これが載置される載置台40を移動させる載置台駆動部30と、撮像画像から光切断線を検出する光切断線検出部22と、光切断線から特徴点を検出して特徴点座標値を計算し、この特徴点座標値と載置台40の移動ピッチとキャリブレーション用ブロックの所定の属性データとを関連付けた特徴点情報を生成する反射位置計算部23と、特徴点座標値と移動ピッチとから世界座標系における特徴点の三次元座標値に変換する変換行列を計算する変換行列計算部24と、特徴点情報と変換行列とに基づいて、撮像画像の画像平面の二次元座標値とこれに対応する世界座標系の三次元座標値との組み合わせを求めて校正用データを生成する三次元座標変換部25とを備えた。
(もっと読む)
厚さチルトセンサ
【課題】表面反射と裏面反射を有し、且つ、厚さを有する物体のチルト角と厚さを同時に測定できる厚さチルトセンサを提供する。
【解決手段】厚さチルトセンサは、測定対象物に向けて測定用光を出射する投光部と、測定対象物の表面反射光及び測定対象物の裏面反射光を受光する受光部とからなる光学系を備えており、投光部は、投光素子と投光レンズと平行光を細くする手段とを具備し、平行光を細くする手段により得られた細い平行光を測定用光とし、受光部は、表面反射光を受光するチルト角測定部と、表面反射光及び裏面反射光を受光する厚さ測定部とを具備し、チルト角測定部は、チルト角測定用受光レンズとチルト角測定用受光素子とを具備し、測定対象物のチルト角を測定し、厚さ測定部は、厚さ測定用受光レンズと厚さ測定用受光素子とを具備し、測定対象物の厚さを測定する。
(もっと読む)
間隙率を求める装置及び方法
【課題】所定の圧力及び所定の温度に加圧された部屋に配置した基板に形成されている物質(特に、薄膜)の間隙率を求める装置及び非破壊方法に関する。
【解決手段】ガス物質(例えば、トルエン蒸気)が部屋1に導入され、所定時間後、部屋に配置した基板2に形成されている薄膜の間隙率が、少なくとも偏光解析測定によって求められる。特に、偏光解析器6から得られる光学的特性は、薄膜の間隙(ポア)に凝縮されたガス物質の量を求めるために利用される。その量は、薄膜の間隙率を計算するために利用される。
(もっと読む)
斜入射干渉計
【課題】測定光および参照光の光軸を容易に一致させることが可能な斜入射干渉計を提供する。
【解決手段】斜入射干渉計1は、光源2と、光を平行光にするレンズ3,4と、平行光を測定光および参照光に分離し、測定光を被測定面Sに対して斜めに射出する光分離部5と、参照光、および被測定面で反射された測定光を合成して干渉光とする光合成部6と、干渉光を検出する検出部と、光源2から光分離部5までの光路内に設けられるとともに、光の光断面サイズよりも小さいサイズの光通過孔81を有し、この光通過孔81でのみ光を通過させるスポット形成部8と、を具備した。
(もっと読む)
3次元位置測定装置
【課題】 画像法の3次元位置測定装置において、測定可能な測定対象物の大きさ、及び測定対象物までの距離の範囲を拡げる。
【解決手段】 撮影視野の仰角、方位角、及び画角の設定を変更する機能を有するPTZカメラ1、2と、PTZカメラ1、2の撮影視野の設定情報及び撮影画像情報に基づいて、PTZカメラ1、2が撮影した測定対象点の3次元座標を算出する3次元座標算出手段34とを有する。
(もっと読む)
位置検出システム、方法、記憶媒体、及びプログラム
【課題】投射光領域の輪郭が不明瞭な場合でも、移動体の正確な位置を検出する。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
(もっと読む)
三次元形状計測装置および三次元形状計測装置のキャリブレーション方法
【課題】三次元形状計測におけるキャリブレーションを効率的に且つ高精度に行う。
【解決手段】ガラス材で構成され、上面、内層面、底面に、光源部11からスリット光が
照射されたときに輝線を映すパターンが形成されたキャリブレーション用ブロックと、複
数の特徴点を有する二次元パターンの撮像画像に基づいて、カメラパラメーターを計算す
るカメラパラメーター計算部22と、上面、内層面、底面に形成されたパターン上の輝線
の画像から特徴点を検出して二次元座標値を計算し、この二次元座標値とキャリブレーシ
ョン用ブロックの寸法データとに基づいて特徴点の三次元座標値を計算し、スリット光の
広がりを示す平面を表す式の係数を計算するスリット光平面計算部24と、カメラパラメ
ーターと平面を表す式の係数とに基づいて、二次元座標値から三次元座標値に変換するた
めの座標系変換係数を計算する三次元座標計算部25とを備えた。
(もっと読む)
3次元運動特性の測定
【課題】所与の画像フレームレートについてより高速の運動を測定するのに有利に用いることができる3次元運動を測定するシステムおよび方法を提供すること。
【解決手段】物体(5)の3次元運動を測定するシステム(1)は、縞模様の線(11)の断面パターン(18)を有する少なくとも2つの異なる色の光(17)を、別個の時間間隔(TR、TG、TB)で物体(5)の表面(6)上へ投影するようになされた光投影手段(2)を含む。このシステム(1)は、露光時間(TE)中に物体の画像を取り込む画像取得手段(3)も含み、別個の時間間隔(TR、TG、TB)は、露光時間(TE)の期間内にある。このシステム(1)は、画像取得手段(3)の位置から見たときの物体(5)上の縞模様の線(21a〜c)の投影パターンに基づいて色ごとに異なる奥行きマップを得、各色の奥行きマップ上の対応する点を決定し、奥行きマップ上の対応する点の位置に基づいて物体の3次元運動特性を決定するように画像を処理するようになされた画像処理手段(4)をさらに含む。
(もっと読む)
基板外観検査装置および基板外観検査方法
【課題】基板の反りに起因する検査対象部の位置ずれを簡易に測定して補正することができる基板外観検査装置および基板外観検査方法を提供する。
【解決手段】本発明の基板外観検査装置1は、基板に反りが生じていない場合に撮影手段(カメラ11)の視野内の基準となる位置に基準パターンが位置するように設定された相対位置において、撮影手段により、基板の反りに起因する基準パターンの位置ずれ量を測定するための基準位置ずれ量測定用画像を取得し、当該画像内における基準パターンの位置と基準となる位置との距離を基準位置ずれ量として測定する基準位置ずれ量測定手段(基準位置ずれ量測定部26)と、基準位置ずれ量および基準パターンの基板上の位置に基づいて基板の反り起因する検査対象部の位置ずれ量を推定し、相対位置を当該位置ずれ量分補正する相対位置補正手段(補正座標算出手段27)と、を備えることを特徴とする。
(もっと読む)
変位センサ
【課題】安定的なフィードバック制御が可能な変位センサを提供する。
【解決手段】制御部は、複数の画素の第2の方向Yに沿った複数の走査線T毎に受光信号を読み取り、該受光信号に基づいて得られる受光波形のピークに基づく光量レベル(ピーク値又は飽和画素の個数)を走査線T毎に検出し、複数設定された光量レベルの所定の範囲毎の走査線Tの個数をカウントし、その個数が最も多い光量レベルの範囲に基づいてフィードバック制御を行う。
(もっと読む)
軌道用距離画像取得システム
【課題】車両の床下に配置され、レール締結装置や継目板や軌道パッドなど軌道近傍の装置の異常を検査するために使用する画像情報を走行中に取得して、異常の判定を的確に行える、軌道用距離画像取得システムを提供する。
【解決手段】レール踏面24に対する垂直面内に設置されて、レーザスリット光11をその垂直面内で照射するレーザスリット光源2と、その垂直面に対して角度を持って設置されて、レーザスリット光11による光切断画像を取得する2次元画像撮像装置2と、取得した光切断画像に基づいて2次元画像撮像装置2からの距離に基づく距離画像を生成する画像信号処理装置3とを備える。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】基板の高さマップを決定するために使用する時間を短縮する。
【解決手段】測定位置に配置された基板の高さレベルを測定するように構成されたレベルセンサ1が開示される。レベルセンサ1は、基板2の複数の測定位置に複数の測定ビームを投影する投影ユニット3と、基板2で反射した後に測定ビームを受ける検出ユニット4と、検出ユニット4が受けた反射測定ビームに基づいて高さレベルを計算する処理ユニット5とを備え、基板2が測定位置に配置されると、投影ユニット3及び検出ユニット4は基板2に隣接して配置される。
(もっと読む)
121 - 140 / 917
[ Back to top ]