
Fターム[2F065MM03]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 物体の移動 (2,140) | 直線移動 (1,219)
Fターム[2F065MM03]に分類される特許
101 - 120 / 1,219
印刷半田検査装置
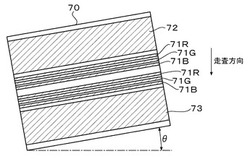
【課題】半田の撮像画像の欠落を無くすことが可能な印刷半田検査装置を提供することにある。
【解決手段】印刷半田検査装置の撮像素子70は、走査方向の垂線に対してなす角θが0度を超え90度未満となるように傾けられ、その撮像領域の長手方向とスリット照明の長手方向が平行となるように照射し走査したとき、そのときの角度を存在率の低いもしくは存在しない長方形や楕円形等の前記半田の回転角度に設定されている。これにより、照射光の長手方向中心軸と、半田の短手方向中心軸を平行にならないようにし、明るさが落ち込む場所が非常に長くなる現象の発生を防ぎ、また、サチュレーション部の欠落画像の補間を可能となる。
(もっと読む)
検査装置及び検査方法

【課題】デバイスが形成されている半導体基板の全面について厚さムラを短時間で検査することができる検査装置を実現する。
【解決手段】本発明による検査装置は、半導体基板(7)のデバイス形成面とは反対側の裏面(7a)に向けて、前記半導体基板に対して半透明な照明光を照射する照明手段(1,2,3)と、半導体基板の裏面に入射し、デバイス構造面(7b)で反射し、前記裏面側から出射した照明光を受光する撮像手段(15)と、 撮像手段からの出力信号を用いて厚さムラを検出する信号処理装置(20)とを具える。信号処理装置は、前記撮像手段からの出力信号を用いて、半導体基板に形成されているデバイスの半導体基板の裏面側から撮像した2次元画像を形成する手段(21)と、撮像されたデバイスの2次元画像と基準画像とを比較し、画像比較の結果に基づいて前記半導体基板の厚さムラを検出する厚さムラ検出手段(22,23,24)とを有する。
(もっと読む)
変位測定装置、変位測定方法、光学用部材成形用金型の製造方法及び光学用部材
【課題】レーザ光の光量安定性、光量分布、光軸ぶれによる測定誤差を低減することのできる変位測定装置及び変位測定方法を提供する。
【解決手段】ビームスプリッタ3により、レーザ光源1から出射されたレーザ光を被測定物4に向かう第1分割レーザ光2a及び第2分割レーザ光2bに分割すると共に、第2受光素子6bにより第2分割レーザ光2bを受光する。そして、第2受光素子6bを、第2受光素子6bに入射する第2分割レーザ光2bの光量の割合と第1受光素子6aに入射する第1分割レーザ光2aの光量の割合とが一致する位置に配置し、位置演算器8は、第1受光素子6aの出力及び第2受光素子6bの出力の差に基づいてレーザ光源1に対する被測定物4の変位を演算する。
(もっと読む)
溶接ビード切削幅測定方法
【課題】溶接ビード切削幅測定の信頼性を向上させる照明方法および画像処理方法を提供する。
【解決手段】照明光をエリア光とし、該エリア光を測定領域がビード長手方向13で相異なる二以上の輝度部(例えばA部、B部、C部の全三部)に分かれるように照射し、画像処理では、ビード長手方向での輝度変化が最大値のビード幅方向分布から、溶接ビード切削幅を求める。
(もっと読む)
コレット位置検出方法及び装置
【課題】簡便に且つ精度上の制限を受け難い状態でコレットの位置を検出し得るコレット位置検出方法及び装置を提供する。
【解決手段】基準座標系において、半導体チップTのピックアップステージ4とボンディングステージ5との間の所定の座標に光センサ9を配置し、一方向にコレット80を移動させながら、コレットまたはその装着部の縁部を光センサ9で検知することにより、2つの縁部の中心である第一中央位置の座標値を検出し、一方向に直交する方向に同様の移動及び検知を行なって2つの縁部の中心である第二中央位置の座標値を検出し、第一中央位置及び第二中央位置からコレット中心の検出座標値を求め、該検出座標値に基づいてコレットの設定座標値を補正することを特徴とするコレット位置検出方法及び該方法を実施するための検出装置。
(もっと読む)
計測装置及び画像形成装置
【課題】記録媒体の変位に追従して外周面が変位させられる追従部材の変位量を、回転体の偏心の影響を受けずに計測すること。
【解決手段】計測装置200は、搬送路32に沿って搬送される記録媒体Pに外周面を接触させ、記録媒体Pの変位に追従して当該外周面が変位させられる追従部材210と、当該外周面の変位量を光学的に計測する変位量計測手段とを有する。
(もっと読む)
共焦点顕微鏡システム、画像処理方法および画像処理プログラム
【課題】観察対象物の表面の断面曲線を正確でかつ高速に検出することが可能な共焦点顕微鏡システム、画像処理方法および画像処理プログラムを提供する。
【解決手段】使用者が観察対象物Sの断面曲線データの取得範囲を指示する。CPU210は、その指示に基づいてX方向に沿って連続的に並ぶ複数の帯状領域を設定するとともに、各帯状領域においてX方向に平行な複数の測定ライン上でレーザ光を走査することにより、複数の測定ラインに基づく画素データを制御部300から取得する。CPU210は、取得した複数の測定ラインの画素データに基づいて帯状領域の複数の断面曲線データを生成し、作業用メモリ230に記憶する。CPU210は、複数の帯状領域の複数の測定ラインについて生成された断面曲線データをX方向に沿って連続する測定ラインごとに連結することにより、連結された複数の断面曲線データを得る。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】光軸に垂直な面内方向の分解能を容易に変更することができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】本発明の一実施形態に係る三次元画像取得装置10は、対物レンズ13の被計測体側共役点の位置と被計測体15の位置とのXY方向の相対的な位置関係を変更するよう載置台16をXY方向に変位させる載置台変位部22を有する。また、三次元画像取得装置10は、載置台変位部22および現在の載置台16の位置における被計測体15の高さを決定する高さ決定部54を制御することにより、載置台16の初期位置と、載置台16を初期位置からXY方向に被計測体側共役点の互いの離間距離より小さい距離移動させた1または複数の補間位置と、のそれぞれの位置での被計測体側共役点における被計測体15の高さの情報からなる被計測体15の三次元形状情報を取得する形状情報取得部55を有する。補間位置は、複数の補間位置パターンのうちの1つが選択されて決定される。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
光位相測定装置、光位相測定方法およびプログラム
【課題】参照光の位相設定精度に限界がある場合でも、測定対象物による位相シフト量を用いた計測する光位相測定装置を提供する。
【解決手段】コヒーレント光源81、光源よりの光波を2分岐する光分岐手段82、光波のうちの参照光波89を周波数ωmで位相変調する位相変調手段83a、分岐された後に被測定対象物85を透過又は反射した信号光波と位相変調された参照光波89とを合成する光合成手段97と、合成された干渉光の強度を測定する光強度測定手段88を有する光干渉計を備えた光位相測定装置で、干渉光の強度を一定の時間に亘って取得し、取得した時系列の強度信号をフーリエ変換し、位相変調の周波数ωmの整数倍の周波数成分のうち少なくとも2つの成分の光強度を演算して、位相変調手段の変調指数mを同定して、該変調指数mに基づいて前記被測定対象物85による信号光波の位相変化量φを算出する演算手段95を備えた光位相測定装置。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
欠陥検査方法及びその装置
【課題】
複数の方向に配置した複数の検出器からの信号を基板の高さ変動の影響を受けることなく処理して基板上のより微細な欠陥を検出することを可能にする。
【解決手段】
第1の集光検出手段と第2の集光検出手段とにそれぞれ複数列の光センサアレイを有する光電変換器を備え、処理手段は第1及び第2の集光検出手段のそれぞれの複数列の光センサアレイからの検出信号を用いて試料の表面に対する第1及び第2の集光検出手段の焦点位置のずれを求め、この求めた第1及び第2の集光検出手段のそれぞれの焦点位置のずれに応じて第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを補正し、この補正した第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを統合して試料上の欠陥を検出するようにした。
(もっと読む)
表面検査装置
【課題】スリット光によって測定対象物に形成される光切断線における干渉縞を低減して良好に表面測定が行われる表面検査装置を構成する。
【解決手段】半導体レーザLDからのレーザ光LBから直線状の領域に拡がるスリット光Sを作り出してワークに照射し、これを撮影ユニットで撮影した画像データからスリット光Sが照射された光切断線を抽出してワークの表面形状データを生成するように表面検査装置を構成する。半導体レーザLDが、PN接合型で接合面の境界部分に沿って直線方向Mに形成される発光層17を有し、この直線方向Mが、スリット光Sの拡がり方向と直交するように相対的な姿勢を設定した。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
板材溶接部の段差量の測定方法および装置
【課題】板材を搬送中に、オンラインで板材の溶接部における段差量を正確に測定することができる板材溶接部の段差量の測定方法および装置を提供する。
【解決手段】溶接により複数の板材をつなぎ合わせた板材Sを搬送しながら、前記板材Sの溶接部S3の溶接線を横切る線上において前記板材Sまでの距離を非接触でかつ同時に多点計測し、前記計測した距離をもとに前記溶接部S3における前記鋼板Sの段差量を算出する。好ましくは、前記溶接線を横切る線上に配列した複数のレーザ距離計41aにより前記多点計測を行なう。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
表面形状測定方法
【課題】表面形状測定機の測定視野以上の測定領域の測定をするに際して、複数の測定結果の繋ぎ合せを簡易に行うことを可能とし、オーバーラップ領域を低減して全体の測定時間を削減し、さらに一定の累積誤差の発生を低減することが可能な表面形状測定方法を提供すること。
【解決手段】面測定データの繋ぎ合せ時に回転方向の補正を行わず、面測定データの平行移動のみを行い面測定データを合成して合成面測定データを取得するようにする。
(もっと読む)
基板検査方法
【課題】 基板に実装された部品を検査する基板検査方法に関わり、より詳細には正確な端子領域を検出して部品の実装状態を検査することのできる基板検査方法を提供する。
【解決手段】印刷回路基板上に形成された部品の端子のチップ位置設定方法は基板上に形成された部品の端子と隣接して形成されたハンダに対して測定された測定高さを設定された基準高さと比較して仮象チップラインを設定することと、端子の長さ方向に沿って端子の幅方向に関する中心ラインを設定することと、仮象チップライン及び中心ラインの交差点から中心ラインによる測定高さを用いて端子のチップ位置を設定することと、を含む。従って、より正確な端子のチップ位置を獲得することができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置
【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
101 - 120 / 1,219
[ Back to top ]