
Fターム[2F065MM06]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874)
Fターム[2F065MM06]の下位に属するFターム
Fターム[2F065MM06]に分類される特許
41 - 60 / 205
光学測定方法および装置
【課題】加工部片の寸法測定を容易にかつ小作業域で、できるようにする。
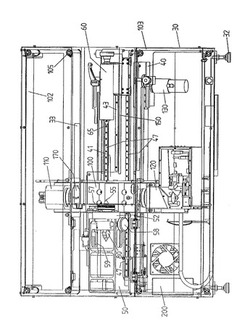
【解決手段】測定する部片を主軸台57と心押し台60との間に維持するため、固定された主軸台57と、固定された主軸台に対向し、主軸台57に近付くか、離れて移動するために線形軸に沿って移動可能である、移動可能な心押し台60とが取り付けられた基準支持40と、測定下の部片によって遮られるコリメート光のビームをx軸にわたって誘導するための光源110を担持し、さらに、光源110と整列し、測定下の部片によって遮られなかったコリメート光のビームの残留光を受けるように配置されている、光学検出器120を担持している、線形軸に沿って移動可能な可動往復台100とを有す。
(もっと読む)
ケーブル弛度観測システム

【課題】 ケーブルの弛度観測を容易かつ適正に行えるようにする。
【解決手段】 弛度測定装置10に、送電線Eの弛み部を撮影する主カメラ20と、主カメラ20を載置し主カメラ20による撮影方向を調節自在な雲台20と、を備え、地上側装置として、弛度測定装置10に制御指令を送信するリモコン50と、主カメラ20による撮影画像を表示するモニタ60と、を備え、リモコン50からの制御指令により、主カメラ20と雲台20とが制御可能となっている。
(もっと読む)
軌道用距離画像取得システム
【課題】車両の床下に配置され、レール締結装置や継目板や軌道パッドなど軌道近傍の装置の異常を検査するために使用する画像情報を走行中に取得して、異常の判定を的確に行える、軌道用距離画像取得システムを提供する。
【解決手段】レール踏面24に対する垂直面内に設置されて、レーザスリット光11をその垂直面内で照射するレーザスリット光源2と、その垂直面に対して角度を持って設置されて、レーザスリット光11による光切断画像を取得する2次元画像撮像装置2と、取得した光切断画像に基づいて2次元画像撮像装置2からの距離に基づく距離画像を生成する画像信号処理装置3とを備える。
(もっと読む)
飛翔体用距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 望遠レンズ20,21が装着された2台のカメラ10,11を支持台30上に所定距離離間して支持し、好ましくは操作しやすいように0.5〜2mの範囲で離間して支持し、2台のカメラ10,11を同期して水平方向及び鉛直方向に回転動作させることができる構成である。2台のカメラ10,11を備え、常に同期して操作できるため、2台のカメラ10,11の光軸間距離、焦点距離、及び視差を用いて飛翔体までの離間距離を容易に求めることができる。
(もっと読む)
3次元距離計測装置及びその方法
【課題】曲面のエッジ部分等における形状計測精度の向上を図り正確なギャップ計測を行う3次元距離計測装置及びその方法を提供する提供する。
【解決手段】画像を撮影する複数の撮像装置と、計測対象物が所定範囲で重なるように撮像装置を回転させて光軸を調整する回転駆動装置とを備えた3次元撮影手段と、複数の画像に写された所要計測点の画素の位置対応付け情報を演算する対応付け演算処理手段と、位置対応付け情報と回転駆動装置の回転情報とを用いて計測対象物の3次元形状を演算する3次元形状演算処理手段と、3次元形状から計測対象物の3次元形状が得られない領域の3次元形状を推定する3次元形状推定演算処理手段と、推定結果より計測対象物上において指定された2点の距離計測点の3次元座標を演算する3次元計測座標演算処理手段と、これらの3次元座標を用いて2点間の距離を演算する距離演算処理手段とを備えた。
(もっと読む)
曲率中心検出装置及びこれを使用した孔位置検出方法
【課題】球面部を有する球状体の曲率中心の位置を精度良く、且つ効率的に検出することのできる曲率中心検出装置及びこれを使用した孔位置検出方法を提供する。
【解決手段】一定の曲率半径を有して形成された球状体1の曲率中心を検出する曲率中心検出装置であって、前記球状体1の断面形状を計測する2次元変位センサ21と、該2次元変位センサ21より計測された前記断面形状に関する情報に基づいて、前記球状体1の曲率中心を演算する演算部23とを備えている。
(もっと読む)
撮像装置及び撮像方法
【課題】欠陥検出に適した画像を取得することを目的とする。
【解決手段】被検査物の検査対象領域に照明光を照射し、検査対象領域の基準画像を基準となる基準撮像条件に従って取得し、基準画像をクラスタリング処理して複数のクラスタに分割し、各クラスタが所定の条件に合致するかを判定し、各クラスタが所定の条件に合致しない場合に、所定の条件に合致しないクラスタの撮像条件を変更し、所定の条件に合致しないクラスタの画像を変更された撮像条件に従って取得し、全てのクラスタが所定の条件に合致するまで撮像条件の変更及びクラスタの画像の取得を繰り返し、全てのクラスタが所定の条件に合致すると判定された場合に、所定の条件に合致した各クラスタの画像を合成して検査対象領域の合成画像を取得する。
(もっと読む)
誘導飛翔体装置
【課題】誘導飛翔体において、複数の赤外線センサーにより、目標に向け誘導するセンサーシステムを提供する。
【解決手段】誘導飛翔体装置の側面に複数の分散させたウインドウ1を配置して、そのウインドウ1を開口として視野の一部を重なるように複数のセンサ部2を配置し、視野の重なる領域で別々のセンサ部2が探知した目標が同一か否かを判定する同定処理部9を有することで、異なるセンサ部2の視野の間で移動する同一の目標を追尾することができる。
(もっと読む)
コンクリート製軌道の軌道狂い測定方法および測定装置
【課題】
コンクリート軌道表面の凹凸に影響され難くかつ段差等の軌道の急峻な位置変化に対して対応可能でかつ検測車両の走行状態で高低狂い、通り狂い等の測定を行うことができるコンクリート製軌道の軌道狂い測定方法および測定装置を提供することにある。
【解決手段】
この発明は、検測車両の走行状態におけるコンクリート製軌道の軌道狂い測定において、距離検出器から得られるデジタル値の測定信号の測定値に対してコンクリート表面の凹凸を除去する幅を設定したメディアンフィルタ処理を行い、メディアンフィルタ処理により得られた測定値に基づいてモノレールの軌道狂い量の算出を行うものである。
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 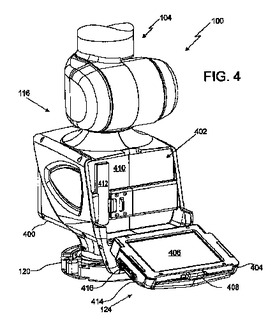 (もっと読む)
(もっと読む)
測位装置及び測位方法
【課題】移動体の位置及び姿勢を継続的に且つより精度良く推定すること。
【解決手段】周辺領域の画像を経時的に撮像する撮像部1と、移動体200の移動量を検出する慣性センサ2と、を備える移動体200の位置及び姿勢を推定する測位装置100に、撮像部1によって撮像された時刻tにおける画像と時刻t+Δtにおける画像とを比較することにより、移動体200の並進ベクトルhimgと回転行列Rimgとを算出する画像処理部3と、慣性センサ2によって検出された移動量に基づいて、移動体200の並進ベクトルhinsと回転行列Rinsとを算出する慣性算出部4と、並進ベクトルhimgと回転行列Rimgとに基づいて、並進ベクトルhinsと回転行列Rinsとに含まれる誤差量を推定するカルマンフィルタ5と、を備え、誤差量に基づいて、慣性センサ2によって検出された移動量を補正するように構成した。
(もっと読む)
機構体、外力検出方法及び機構体の制御方法
【課題】ロボットなどの機構体に付与される外力の大きさ及び方向の少なくとも一方の取得を安価に実現する。
【解決手段】移動部20と、移動部20に支持されたロボット本体10と、ロボット本体10及び移動部20のいずれか一方に設けられ、ロボット本体10及び移動部20のいずれか他方に対して照射した検出光の反射光を受光する光学式変位センサ50と、光学式変位センサによる反射光の受光結果から、光学式変位センサから検出光が照射された位置までの距離を算出し、当該算出結果に基づいて、ロボット本体10に対して付与される外力の大きさ及び方向の少なくとも一方を取得する制御部70と、を備えている。
(もっと読む)
形状測定装置
【課題】測定者に被測定物体に対するプローブの位置やライン光の照射角度をアシスト(支援)することができる形状測定装置を提供する。
【解決手段】光学式センサにより被測定物体51の形状を測定して測定情報を出力するプローブ12と、複数のアーム部11a及びプローブ12を回転可能に接続する2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、制御部20は、プローブ12の操作を支援するアシスト表示を表示部30に表示するように構成される。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
形状測定装置
【課題】測定者の位置や姿勢に関わらず、常に、被測定物体の測定結果を目視で確認することができる形状測定装置を提供する。
【解決手段】被測定物体51の形状を測定して測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、この形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、表示部30を、測定者の頭部に装着され、この測定者の少なくとも一方の眼前に形状情報を投影する投影部35を有するヘッドマウントディスプレイで構成する。
(もっと読む)
形状測定装置
【課題】形状測定中は移動機構部を固定することができる形状測定装置を提供する。
【解決手段】光学式センサ40により、静止した状態で被測定物体51の表面を測定して測定情報を出力するプローブ12と、アーム部11a及び少なくとも2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、アーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bを被測定物体51に対して静止させるロック機構部15と、光学式センサ40により測定情報を取得し、エンコーダ21から角度情報を取得して、被測定物体51の形状情報を算出する制御部20と、を有する形状測定装置100において、制御部20は、光学式センサ40により被測定物体51を測定するときに、ロック機構部15を作動させて関節部11bを静止させるように構成される。
(もっと読む)
ヘディングを決定するためのシステムおよび方法
【課題】運行の期間中にS字ターンのような伝統的な整合手順を要求すること無く、運行ビークルのヘディングを決定するためのシステムおよび方法を提供する。
【解決手段】運行ビークル上に搭載可能なヘディングを決定するためのシステムは、第1の時点および第2の時点でキャプチャされ照合された複数の識別特徴のそれぞれについて、所与の照合された識別特徴に関連する第1の単位ベクトルと、その所与の照合された識別特徴に関連する第2の単位ベクトルとを決定する画像システムと、第1の時点から第2の時点までキャプチャされるキャリア位相情報に基いて並進ベクトルを決定するGPSと、補正されたヘディングを決定するために、複数の照合された識別特徴のそれぞれについてエピポーラ方程式における誤差を、それぞれの第1の単位ベクトルと第2の単位ベクトルと並進ベクトルとに基いて最小化する結合プロセッサとを備える。
(もっと読む)
ロボット装置
【課題】計測前までの組み立て作業を無駄にせず組み立てを継続することができるようにしたロボット装置を提供する。
【解決手段】ロボット101と、ロボット101に取り付けられワークを把持するエンドエフェクタ106,107と、ワークの形状計測センサ108と、入力装置を有しロボットの動作を制御する制御装置102と、を有し、制御装置102は、あらかじめ決められた範囲を計測範囲として、ワークを形状計測センサにより計測させ、計測範囲にワークの全体像が入っていない場合には、計測範囲を変えて再計測し、ワークの位置姿勢を決定し、ワークの位置姿勢へエンドエフェクタを移動させてワークを把持し、再計測は、入力装置から入力された計測データに基づいて、計測範囲を変えて再計測を実行する。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
41 - 60 / 205
[ Back to top ]