
Fターム[2F065MM06]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874)
Fターム[2F065MM06]の下位に属するFターム
Fターム[2F065MM06]に分類される特許
61 - 80 / 205
光反射型センサおよびマーク検出器

【課題】 光反射型センサの検出性能を向上させる。
【解決手段】 光透過性の受光ガイド部6と、該受光ガイド部6の基端部に設けられ、前記受光ガイド部6に入射された検出対象からの反射光を受光する受光部3と、遮光部材5を介在して前記受光ガイド部6の周部を囲むように配設された光透過性の筒状発光ガイド部4と、該発光ガイド部4の基端部に設けられ、前記発光ガイド部4を通して前記検出対象に発光光を照射する発光部2とを備える。前記発光ガイド部4の内側の先端角部が面取りされている。
(もっと読む)
非接触物体検査
物体のエリアのトポグラフィを、物体上に投影されたパターンの位相の解析を介して検査する非接触方法である。その方法は、第1のパースペクティブから獲得された、光学的パターンが投影される物体の第1の画像を取得するステップと、第2のパースペクティブから獲得された、光学的パターンが投影される物体の第2の画像を取得するステップであって、第2の画像内の物体上に当たるときの光学的パターンは、第1の画像内の光学的パターンとは異なる、ステップとを含む。その方法は、第1の画像内に映し出された光学的パターンの少なくとも1つの領域の位相に関する位相データに基づいて、物体の少なくとも1つの領域のトポグラフィを記述するデータを決定するステップをさらに含む。第2の画像内に映し出された物体の対応する領域から獲得した位相データは、第1の画像から獲得した位相データまたはトポグラフィデータのあらゆる曖昧性を解決するために使用される。
 (もっと読む)
(もっと読む)
3次元形状測定方法

【課題】簡単に合成できると共に測定できない箇所が生じない3次元形状測定方法を得る。
【解決手段】定盤10の平坦な定盤面12に多数のマーク14を形成すると共に、多数のマーク14から大きさと間隔との違いにより少なくとも3つのマーク14を特定可能に形成する。また、各マーク14の大きさと間隔とを記憶する。そして、定盤面12に定盤面12より小さな被測定物1を載置して、被測定物1の部分領域を形状測定器2により少なくとも3つのマーク14と共に光学的に3次元測定して測定値を得る。その後、形状測定器2を移動して、少なくとも3つのマーク14と共に被測定物1の他の測定箇所の部分領域を光学的に3次元測定して測定値を得て、記憶したマーク14の大きさ及び間隔と測定したマーク14の大きさ及び間隔とに基づいて、両測定値を同一座標系に変換して合成する(ステップ100〜200)。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】計算量を削減し効率的な3次元位置情報の生成を行う構成を実現する。
【解決手段】カメラによる撮影画像を観測データとして入力し、特徴点位置情報を含む多次元正規分布データからなる状態データを更新することで特徴点の3次元位置を求める例えばSLAM処理において、3次元情報の生成対象領域を区分したサブマップを設定する。さらにサブマップに属しない特徴点に関するデータを含まないサブマップ対応の状態データを生成して、観測データに基づいてサブマップ対応状態データを更新する。本構成によれば状態データのデータ量が削減され、状態データ更新に伴う計算量を減少させることが可能であり、効率的な処理が実現される。
(もっと読む)
車両操縦用画像表示装置および方法
【課題】夜間または濃霧などの視界の悪い状況下で、車両前方の路面領域を画像表示することができ、これにより舗装路、未舗装路を区別することなく移動体を操縦することができる車両操縦用画像表示装置および方法を提供する。
【解決手段】車両1に搭載された赤外線カメラ10により車両前方の特定範囲の赤外線画像2を撮影し、車両に搭載された3次元形状測定装置20により前記特定範囲の3次元形状3を計測し、演算処理装置30により3次元形状から車両が通りやすい路面領域4を検出し、赤外線画像2上において路面領域が滑らかに見えるように画像処理した補正赤外線画像5を形成し、表示装置40により補正赤外線画像5を表示する。
(もっと読む)
単一カメラ及び運動センサーによる3次元情報抽出
【課題】単一のカメラを使用して被写体の3次元情報を提供する。
【解決手段】二つの異なるカメラ位置から、少なくとも一つの被写体の写真を撮影する。カメラに連結される運動測定装置は、ある地点から他の地点へ移動した際のカメラの直線位置の変化及び角度方向の変化を測定し、測定して得られた情報から、被写体の3次元情報を導き出す。また、ある実施形態においては、写真の画像から被写体の3次元情報を導き出す。
(もっと読む)
多重ヘッドアライメントシステムにおけるアライメントヘッドの位置キャリブレーション
【課題】多数のアライメントヘッドのキャリブレーションを改良し、オーバレイ精度及び製品歩留まりを向上させる。
【解決手段】多重ヘッドアライメントシステムにおいて主アライメントヘッドを用い副アライメントヘッドの位置較正をするためのキャリブレーション方法が開示される。このシステムは例えばウェーハ表面のマーカ測定に使用され、そのウェーハ内またはウェーハ上に回路を形成するリソグラフィ処理中に行われる。複数のオフセット測定が少なくとも1つの副アライメントヘッドのために行われ、それにより副アライメントヘッドの主アライメントヘッドに対するオフセットが測定され、以降のウェーハ測定演算での補正データとして使用される。
(もっと読む)
機上測定方法及び測定装置
【課題】ワークの加工面形状を工作機械上で高精度に測定し得る装置等を提供する。
【解決手段】基準ミラー21をテーブル2上に配設し、ワークWの加工面を測定する第1のレーザ変位計L1と基準ミラー21の基準面を測定する第2のレーザ変位計L2とを工具保持台3に配設する。測定運動付与部24によってテーブル2と工具保持台3とを正弦波軌跡で相対移動させ、この状態で測定される加工面変位データと基準面変位データとを基に、感度算出部28によって第1のレーザ変位計L1の感度を算出する。ついで、実形状データ算出部29により、算出された感度を基に、加工面変位データを補正し、補正後の加工面変位データと基準面変位データとの差分をとって、加工面の実形状データを算出する。
(もっと読む)
全データセットを生成するための方法
本発明は、個別データセットを統合することによって、少なくとも1つの特徴を決定すべく、物体の少なくとも1つの部分の全データセットを生成するための方法であって、個別データセットは、物体に相対して動く光学センサおよび画像処理装置によって決定され、物体の連続的な画像の個別データセットは、該個別データセットの統合のために適合される冗長データを含んでなる方法に関する。物体のスキャンの際に得られたデータの量が、十分であって、最適な評価がなされることができるが、余りに多いデータ量を処理することがないように、光学センサと物体との間の相対運動の大きさに従って、単位時間当たりに決定された個別データセットを変化させることが提案される。 (もっと読む)
内視鏡装置
【課題】観察対象物と内視鏡遠位端部との距離を相対的に表示することが可能な内視鏡装置を得る。
【解決手段】スコープコントローラ231は、観察画像を仮想的に複数のメッシュに区分する。そして、メッシュの中心点Oに向けてレーザ光照射部215にレーザ光を照射させる。レーザ光受光部216は中心点Oからの反射光を受光して、反射光の位相を検出する。スコープコントローラ231は、照射したレーザ光と反射光との位相差を用いて、メッシュの中心点Oから遠位端部211までの距離を算出する。システムコントローラ301が、受信した距離に応じて、等距離線を作成し、表示画像に合成する。そして、表示画像を表示部400に表示させる。遠位端部211から最も距離が近い部位を取り囲む等距離線は、最も濃い色で描かれ、遠位端部211から距離が離れるにつれて等距離線を表す色が薄くなる。
(もっと読む)
三次元形状測定システム
【課題】被測定物の測定対象が広範囲である場合における測定の所要時間を短縮できるとともに、製造コストを低減することを可能とする三次元形状測定システムを提供する。
【解決手段】パルス光を生成するパルス光源36と、生成されたパルス光を分配する光分配器64と、分配された各パルス光に基づいて、色が規則的に経時変化するチャープ光パルスを生成する複数のチャープ導入装置84と、生成された各チャープ光パルスをワーク32の各照射領域94に照射し、ワーク32で反射された各チャープ光パルスの各反射光像を取得する複数の反射光像取得部114と、取得された前記各反射光像の二次元情報及び色情報を用いて、ワーク32の三次元情報を取得するカラー二次元検出器106とを有する。
(もっと読む)
改良した被膜厚測定法
基材上の被膜の厚みを測定する方法を記載する。前記基材は、第2主表面と反対側の第1主表面を有し、前記被膜は前記第1主表面の一部分を覆っている。第1測定工程の間に、第1測定ビームを用いて第1基準点から前記基材の前記第1主表面の前記被膜で覆われていない一部分までの距離を測定し、第2測定ビームを用いて第2基準点から前記基材の前記第2主表面の被膜で覆われていない一部分までの距離を測定する。第2測定工程の間に、前記第1測定ビームを用いて前記第1基準点から前記被膜までの距離を測定し、前記第2測定ビームを用いて前記第2基準点から前記基材の前記第2主表面の被膜で覆われていない一部分までの距離を測定する。そのようにして測定した前記被膜の厚みは、自動車用グレージングペインにインクを塗布する方法における制御パラメータとして用いることもできる。  (もっと読む)
(もっと読む)
モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム
【課題】道路を高解像度で表す三次元モデルを生成できるようにすることを目的とする。
【解決手段】画像処理部110はカメラ画像を選択し、所定の処理範囲を処理範囲画像191として抽出し、処理範囲画像191のレンズ収差を補正する。画素点群生成部120はカメラ画像と三次元点群198とに基づいて処理範囲画像191の各画素に対応する三次元座標値および色情報を示す画素点群192を生成する。画素補間点群生成部130は画素点群192に基づいて画素点が低密度である部分を補間する画素補間点群193を生成する。道路三次元モデル生成部140は画素点群192と画素補間点群193とを含んだデータを道路三次元モデル194として生成する。
(もっと読む)
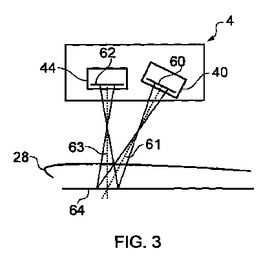
動的基準フレームを用いた3次元表面検出方法及び装置
3次元対象物の表面形状を光センサで取得する。投影装置及びカメラを有するセンサを、単一回露光で3次元データを生成するよう構成し、センサを3次元対象物に対して移動させるか、又はその逆を行う。パターンを3次元対象物に投影し、投影パターンの一連のオーバーラップ画像をカメラで記録する。一連の3Dデータセットを記録画像から求め、続いて得た3Dデータセット間で位置合わせを行う。これにより、相対位置を追跡せずにセンサを対象物の周りで自由に移動させること又はその逆を行うことができ、3次元対象物の表面形状をオンザフライで求めることができる。 (もっと読む)
移動体用スペクトル測定装置
【課題】車両等の移動体に搭載されたスペクトルセンサによる観測データにより測定対象の精度の高い識別を可能にするとともに、同観測データとして必要とされる情報のより適切な取得を可能とする。
【解決手段】波長情報と光強度情報とを測定可能なスペクトルセンサを車両に搭載し、このスペクトルセンサ100にて検出される観測光のスペクトルデータに基づいて車両周辺の測定対象を識別する。スペクトルセンサ100では、スリット102の走査により順次取り込まれる光像を波長毎に分光しつつ撮像素子に受光させることによってスペクトルデータが取得される。そして、その環境情報及び運転操作を含む運転者情報の少なくとも一方に基づいてスリット102の走査領域を制御する。
(もっと読む)
フラットベッド・スキャン・モジュール、フラットベッド・スキャン・システム、フラットベッド・スキャン・モジュールのアライメント誤差測定用ジグ及びこれを用いたフラットベッド・スキャン・モジュールのアライメント誤差測定方法
【課題】平板の形状を自動的にスキャンして計測誤差を低減することができるフラットベッド・スキャン・モジュール、フラットベッド・スキャン・システム、フラットベッド・スキャン・モジュールのアライメント誤差測定用ジグ及びこれを用いたフラットベッド・スキャン・モジュールのアライメント誤差測定方法を提供する。
【解決手段】本発明に係るフラットベッド・スキャン・モジュールは平板の形状をスキャンするためのスキャンモジュールであって、仮想の四角形の一辺の両端部にそれぞれ位置し、平板に線状のレーザビームを出射する第1レーザ発振部及び第2レーザ発振部と、四角形の一辺に隣接した他辺の両端部にそれぞれ位置し、平板に線状のレーザビームを出射する第3レーザ発振部及び第4レーザ発振部と、四角形の中央部に位置し、平板から反射されたレーザビームを撮影するカメラと、第1ないし第4レーザ発振部及びカメラを支持するフレームと、を含むことを特徴とする。 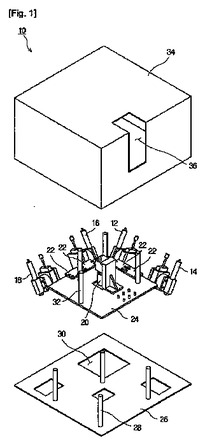 (もっと読む)
(もっと読む)
物体認識方法、物体認識装置、自律移動ロボット
短時間で良好な物体認識を行う。本発明に係る物体認識方法は、予め作成した物体モデルを用いて、観測場面に含まれる対象物体を認識する物体認識方法であって、観測場面の距離画像を生成し、距離画像から注目点を検出し、注目点を含む領域の特徴量である第1の特徴量を抽出するし、第1の特徴量と、物体モデルの距離画像の領域の特徴量である第2の特徴量と、のマッチング処理を行い、マッチング処理結果に基づいて、観測場面の座標系に第2の特徴量を射影するための変換行列を計算し、変換行列に基づいて、物体モデルに対して対象物体を認識する。  (もっと読む)
(もっと読む)
剛体電車線測定装置
【課題】剛体電車線の幅方向の摩耗に関する情報を得ることが可能で、剛体電車線の状態を高精度で簡易に測定する剛体電車線測定装置を提供する。
【解決手段】本発明は、レール上を移動する保守用車に搭載されて剛体電車線10の測定を行う剛体電車線測定装置であって、ローラー支持部材131によって回動可能に支持されると共に、前記剛体電車線10に接触し前記保守用車の移動に伴い回転する摺接ローラー132と、前記摺接ローラー132の回転を検出するロータリーエンコーダー133と、前記剛体電車線10の幅方向にわたる形状を計測するラインレーザ型2次元形状計測センサ140と、前記ラインレーザ型2次元形状計測センサ140を移動可能に搭載するリニアレール141と、前記ローラー支持部材131と前記リニアレール141とが搭載される計測基台130と、前記摺接ローラー132を一定の荷重で前記剛体電車線10に接触させる定荷重バネ123と、を有することを特徴とする。
(もっと読む)
物体認識方法
【課題】精度良くワークの位置を検出する方法を提供する。
【解決手段】第1パターンが形成された容器上に第1パターンの内側を目標にして四角板を配置するワーク配置工程と、第1パターンと四角板とを撮像して画像データ47を取得する撮像工程と、画像データ47における第1パターン像49と四角板像48との相対位置を分析して四角板の姿勢を認識するワーク認識工程と、を有する。そして、第1パターンは四角板の外形形状を囲むパターンに形成されている。
(もっと読む)
連続的に撮像したカラー画像及び距離画像の記録方法と結合方法ならびにその装置
【課題】本発明は、自動車(高速移動体)に搭載した3次元画像センサによって撮像した路面、橋梁、壁面などのカラー画像と距離画像と自動車(高速移動体)の走行(移動)データから、路面、橋梁、壁面などの3次元形状を把握する方法に関する。
【解決手段】走行する自動車(高速移動体)に搭載した3次元画像センサによって撮像した路面、橋梁、壁面などの距離画像と自動車(高速移動体)の走行(移動)速度、加速度、各速度の補助データから、各フレームごとにかかったカメラ座標系の並進と回転を検出する方法と、検出したカメラ座標系の並進と回転を補正して隣接フレーム間のカラー画像と距離画像を結合する方法と、複数フレームにわたる路面、橋梁、壁面などの3次元形状を把握する方法を提供する。
(もっと読む)
61 - 80 / 205
[ Back to top ]