
Fターム[2F065MM06]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874)
Fターム[2F065MM06]の下位に属するFターム
Fターム[2F065MM06]に分類される特許
161 - 180 / 205
形状認識装置及び歪評価装置

【課題】スプリングバックなどによる変形が発生していたとしても被測定面の形状認識を正確に行うことができる形状認識装置を提供する。
【解決手段】被測定面の三次元計測データに基づいて形状認識を行う形状認識装置50が被測定面の凹凸を表す計測データの二次元断面データのうち、断面の長さ方向に沿った複数の第1データ群に対して、一定の曲率を有する第1近似曲線を夫々適用する近似曲線適用手段43と、複数の第1近似曲線の曲率を導出する曲率導出手段44と、曲率導出手段44により導出された複数の曲率の、断面の長さ方向に沿った変化データに基づいて、曲率が断面の長さ方向に沿って一様な一様範囲を決定する一様範囲決定手段45と、二次元断面データのうち一様範囲決定手段45が決定した一様範囲内に存在する第2データ群に関して、一定の曲率を有する第2近似曲線を導出する近似曲線導出手段46とを備える。
(もっと読む)
車両の移動距離検出方法、車両の移動距離検出装置、車両の現在位置検出方法及び車両の現在位置検出装置

【課題】車速センサからのパルス信号が出力されなくなっても、精度良く移動距離及び現在位置を検出することができる車両の移動距離検出方法、車両の移動距離検出装置、車両の現在位置検出方法及び車両の現在位置検出装置を提供する。
【解決手段】車速センサのパルス信号に基づいて求めた車両の車速Vnが基準車速Vk以上の時、車速センサのパルス信号に基づいて移動距離DMを求める(ステップS1−2、S1−3)。車両が前記基準車速Vk未満の時、後方カメラで異なる時間に撮像した複数の画像データGのパターンQ1、Q2を取得し、そのパターンQ1、Q2に基づいて移動距離DMを求める(ステップS1−6〜ステップS1−14))ようにした。
(もっと読む)
画像中の顔を認識する方法
【課題】照明、姿勢の変動による悪影響を受けない実用的な顔の認識方法を得る。
【解決手段】形状パラメータ及び姿勢パラメータを有するモーフィング可能なモデルが、画像中の顔に当てはめられて、顔の3次元モデルが構成される。この3次元モデルを用いて画像中の顔からテクスチャが抽出される。形状及びテクスチャは、バイリニア照明モデル内に投影されて、画像中の顔の照明基底が生成される。この画像中の顔の照明基底は、既知の顔の複数のバイリニア照明モデルの各々の照明基底と比較されて、画像中の顔が特定される。
(もっと読む)
測定対象物計測システム、及び送電線下離隔計測システム
【課題】 送電線12や樹木13を含む測定対象物の精度の良い3次元座標データを低いコストで絶対座標系にて求めることができる測定対象物計測システムを提供することを目的とする。
【解決手段】 架空線11を自走する自走機100Aを走行させながら、当該自走機100Aに取り付けた3台以上のカメラDにて送電線12及び樹木13を複数回同期撮影し、同期撮影して得られた1組の画像に対して対応付けを行い、同期撮影した送電線12及び樹木13の3次元座標データを求め、隣接して同期撮影した送電線12及び樹木13の重複する3次元座標データを重ね合わせて、送電線12及び樹木13の統合した3次元座標データを求める測定対象物計測システム100。
(もっと読む)
変位センサ
【課題】可動部の構造の簡素化および軽量化を図れかつ、接触部の変位位置を高精度に検出できる変位センサを提供する。
【解決手段】変位センサ100を構成するセンサ本体部300は、測定子200を変位可能に支持する支持プレート320と、測定子200に取り付けられ基準反射面411を有する反射ミラー410と、所定位置に固定され参照反射面421を有する参照反射板420と、光束を射出する光源431と、基準反射面411および参照反射面421にて反射され重ね合わされた光学像を撮像する撮像素子441と、撮像された光学像に基づいて基準反射面411および参照反射面421からの各反射光が重ね合わされることで生じる干渉縞の強度分布に関する強度分布情報を認識し、強度分布情報に基づいて接触部211の変位位置を算出する演算処理手段450とを備えている。
(もっと読む)
検査装置
【課題】 本発明は、カラーフィルタ基板上の突起部の高さを絶対値で評価でき、且つ検査時間の短縮化及び装置の低コスト化が可能な検査装置を提供することを目的とする。
【解決手段】 本発明は、カラーフィルタ基板2の一方主面に対して所定の高さを維持し、且つカラーフィルタ基板2の一方主面に対して平行にレーザー光4を出射するレーザー光源3と、カラーフィルタ基板2を挟んでレーザー光源3と対峙し、レーザー光4を受光するエリアセンサ5と、レーザー光源3がカラーフィルタ基板2の一方主面上を順次スキャンするように、カラーフィルタ基板2、又はレーザー光源3及びエリアセンサ5の組の少なくと一方を移動させる移動テーブル1と、レーザー光4の受光量を記憶する記憶部7と、受光量に基づいて、カラーフィルタ基板2上に所定の高さ以上の突起部6が存在するか否かを判定する判定部8とを備える。
(もっと読む)
形状測定装置固有の系統誤差を測定する方法と縦型形状測定装置。
【課題】
シリコンウェーハやFPD用ガラス基板等のパネルの形状の大面積・薄肉化に伴い、自重によるパネルの変形の影響を受け、正確なパネルの形状の測定が困難になってきているが、縦型形状測定装置を使用し、正確なパネルの形状を測定する方法を提供する。
【解決方法】
縦型形状測定装置を使用し、大面積・薄肉パネル形状を測定する場合の、その測定に影響を与える誤差要因を分析し、縦型形状測定装置固有の系統誤差を抽出した。その抽出した系統誤差値を補正値として形状を測定すれば、パネルの正確な形状測定が可能となる。
(もっと読む)
物品の形状を測定する方法及び装置
板ガラスの形状を測定する方法が提供される。この方法は、板ガラスを流体と接触させて配置することと、板ガラスの表面上の複数の位置において、センサと板ガラスの表面との間の距離を測定することとを含む。この方法は、板ガラスの形状を、円筒形や球形等といった少なくとも1つの単純な形状要素にデコンボリューションすることを更に含み得ると共に、この少なくとも1つの形状要素に基づき、ガラス製造プロセスにおける加熱器アレイの温度プロファイルを変更することを更に含み得る。  (もっと読む)
(もっと読む)
移動体制御方法および移動体
【課題】3次元環境内の状態を移動体の動作との関係で適切に分類し、記憶データ量を少なくすると共に、移動体の走行時の処理負担を軽減できる移動体制御方法を提供する。
【解決手段】環境クラス分類部34において、グリッドマップデータGMおよびフロア高さデータFHを基に、2次元座標(x、y)の各々についてその状態を分類した変数env_type(x,y)を生成する。次に、パス決定部36において、ロボット1の移動過程において、ロボット1の2次元位置(x、y)に応じて、それに対応した上記状態を特定し、その状態に予め対応付けられた処理部35_1〜35_6を選択してロボット1の動作を駆動させる。
(もっと読む)
非接触三次元計測方法及びシステム
【課題】大きな被測定面を高い精度で非接触三次元計測する技術を提供する。
【解決手段】測定ヘッド21からの信号に基づいて画素毎に三次元距離データを割り当てた測定画像を出力する非接触三次元測定手段20と前記測定ヘッドを位置決めする測定ヘッド移動手段10とを用いて大きな被測定面を非接触で三次元計測するシステム。このシステムは、被測定面を隣り合う同士が互いに重なり合う重合領域を有するように複数の区画面に分割する被測定面分割部32と、前測定ヘッドを区画面に位置決めしながら非接触三次元測定手段から取得した区画面毎の測定画像の重合領域を互いの対応する画素の三次元距離データの差が小さくなるようにずらしながら重ね合わせていくことで前記隣り合う区画面に対応する測定画像を適正位置でつなぎ合わせる測定画像合成手段34を備えている。
(もっと読む)
孔のパターンの位置および角度方向の特定方法および特定装置
【課題】少なくとも部分的に閉塞した開口部を有する孔のパターンの位置および角度方向を特定する自動化された装置および方法を提供する。
【解決手段】赤外線カメラ(44)、加熱器(58)、レーザスポット投射器(46)、レーザスポットセンサ(48)、メモリ装置(40)およびプロセッサ(42)を含む熱画像/走査装置(10)が提供される。物品(18)のデジタル式熱ピクセル画像が、物品の加熱時にカメラ44で取得される。閉塞の程度の最小の孔(12)が走査用の孔候補として識別される。少なくとも1つの孔候補を含む領域(24)において、レーザビームが物品の表面(16)に投射され、スポットセンサ(48)が反射光(52)を受信する。走査領域(24)を表す一連の点(54)が、メモリ装置(40)にポイントクラウド(70)として保存され、領域(24)における各々の孔の位置および角度方向を計算するために処理される。
(もっと読む)
配管内検査システム
【課題】 配管内部を視覚的に確認可能とする。
【解決手段】 配管内部検査システムは、洗浄対象配管100内部の洗浄水で流されるカプセル300、洗浄対象配管100に設けられた複数の座110に挿入されたリーダ310、情報処理装置、を有する。カプセル300内部には、洗浄対象配管100内部を連続的に撮影する撮影装置、撮影装置からの画像データ及びその撮影時刻が蓄えられるメモリ、電源装置、洗浄対象配管100内の各リーダ310と通信するRFIDタグ、が封入されている。洗浄対象配管100内をカプセル300が進行する間、撮影装置は、洗浄対象配管100内を逐次撮影し、撮影画像及び撮影時刻をメモリに格納する。各リーダ310は、カプセル300が通過するごとに、RFIDタグのタグID及びカプセル通過時刻を保存する。情報処理装置は、撮影装置による配管内部画像を表示しながら、撮影時刻と、各リーダ310で記録されたカプセル通過時刻との対応により、表示中の配管内部画像の撮影位置を求める。
(もっと読む)
ねじ部検査装置及びねじ部検査方法
【課題】 物体に設けられるねじ部を画像処理により検査するための装置及び方法において、ねじ部が適正な状態にあるか否かを高精度かつ短時間で検査できるようにする。
【解決手段】 ねじ部検査装置10は、物体に設けられるねじ部を画像処理により検査するものであって、ねじ部の中心軸線に対し傾斜した方向から、物体のねじ部を含む領域を撮影して、物体の2次元画像を取得する撮像部12と、撮像部12によって取得された2次元画像におけるねじ部の画像データに、フィルタ処理を施す画像処理部14と、フィルタ処理を施したねじ部の出力画像データに基づき、ねじ部にねじが存在するか否かを判定するねじ判定部16とを備える。画像処理部14が行なうフィルタ処理は、エッジ検出処理を含み、ねじ部の出力画像データは、ねじ部におけるエッジデータを含む。
(もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体
【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
非接触式三次元形状計測方法及び計測機
【課題】接触式三次元形状計測機の3軸移動機構等を非接触式として利用できることに着眼して、非接触式位置センサを代わりに取付けて転用による非接触式三次元形状計測方法を提供する。
【解決手段】接触式三次元形状計測機の本来接触式プローブが取付けられるべきヘッド6の原点位置に対する非接触式位置センサ29の原点位置の原点較正データを予め作成しておき、駆動手段7x,7y,7zを駆動制御するように3軸移動機構8の移動範囲の移動始端位置及び移動終端位置を逐次指令し、ヘッド6の移動走査過程において非接触式位置センサ29に対して所定の繰返し周期でトリガー指令を行い、移動始端位置及び移動終端位置並びに繰返し周期ごとの移動位置で規定されるヘッド6の原点位置を原点較正データに対応して較正して非接触式位置センサ8の原点位置を求めて、この原点位置における非接触式位置センサ8の非接触検知位置データにより計測対象物である車両ボデー9の三次元形状データを作成する。
(もっと読む)
許容誤差領域を用いる3次元測定データの検出方法
【課題】製品検査の際、設計データと測定データの差異を迅速に測定する。
【解決手段】制御部は、設計データの分析情報に基づいて補助幾何データを生成し、ユーザーインタフェース部から入力される許容誤差情報に基づいて、上記分析情報から生成された上記補助幾何データに、測定用許容誤差領域を設定し、3次元スキャナーで測定された測定データの座標系を、上記測定対象物の設計データの座標系と一致するように、調整する。次に上記制御部は、上記測定データから上記補助幾何データの測定用許容誤差領域に含まれる候補点群を抽出し、これらを補助幾何データにフィッティングして、上記ユーザーインタフェース部に出力する。
(もっと読む)
装置及び装置内でルーメンの3次元幾何形状及び寸法を決定する方法、オブジェクトの少なくとも一部分の3次元デジタル表示を得るための方法、及び、空間内の2つ以上の点の相対位置を得るための方法
固定の、既知の幾何形状及びサイズのルーメン内に配置された距離測定又はイメージングアセンブリの出力は、イアカナルのようなオブジェクトの3次元幾何形状及び寸法を決定するのに十分なデータを供給することができる。ルーメンの幾何形状及び寸法は、既知の幾何形状及び寸法のオブジェクトを測定又はイメージングすることによって決定又は測定される。 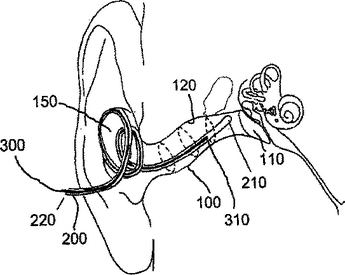 (もっと読む)
(もっと読む)
溶接部の検査方法および検査装置
【課題】 ワークに形成されたスポット溶接部の数と位置を精度良く検査することができる検査装置を提供する。
【解決手段】 溶接部12を検査するための検査装置10は、ロボットアーム21に設けられたレーザセンサ22と、レーザセンサ22をワーク11の表面に沿って移動させる制御部23と、判定部24と、表示装置25などを備えている。判定部24は、レーザセンサ22をワーク11に対して等速度で移動させている間に、レーザセンサ22からワーク表面11aに向けてレーザビームを照射し、その反射光に基いてレーザセンサ22からワーク11までの距離を検出する。こうして検出された波形を微分化することにより、レーザセンサ22からワーク11までの距離の変化量を求める。そしてこの変化量がしきい値を越えたとき、レーザビームが照射された個所にスポット溶接部12が存在したと判断する。
(もっと読む)
高精度CV演算装置と、この高精度CV演算装置を備えたCV方式三次元地図生成装置及びCV方式航法装置
【課題】 カメラ位置とカメラ回転角を示すカメラベクトルにGPS等で得られる絶対座標を与えて校正を行い、高精度の位置情報を生成・取得する。
【解決手段】 移動体の周辺のビデオ映像を取得するとともに、移動体の位置計測データを計測する移動体計測部10と、取得されたビデオ映像からカメラの三次元位置及び3軸回転位置を示すCVデータを生成するとともに、計測された位置計測データを取得するデータ生成部20と、CVデータ及び位置計測データを、基準時刻により関連付けられた時刻同期CVデータと時刻同期計測データとして生成する時間軸整合部30と、時刻同期CVデータと時刻同期計測データを同一時間軸で関連付けて比較して相互に補完補正するCV補正信号を生成するCV補正部40と、取得されたビデオ映像の各フレームに対応して、CV補正信号により補正された高精度CV値を出力する高精度CVデータ出力部50とを備える。
(もっと読む)
カメラ運動及び物体形状の復元システム
【課題】 カメラを移動しながら撮影した画像列だけを用いて、カメラ運動と物体の3次元形状を高精度かつ効率よく復元すること。
【解決手段】
初期推定において、画像1から画像kまでに共通に現れる特徴点系列(S12)に対して退化基準値を計算し(S13)、退化基準値が閾値を超えた場合(S14でYes)にkを初期推定に用いる適切な画像枚数として、カメラ運動と物体形状を求める。また、より精度を高めるために、特徴点系列(S12)に対してロバスト推定を用いてカメラ運動と物体形状の解候補となる部分集合giとその復元基準値を求め(S15)、復元基準値が閾値を越えたgiに対して退化基準値を計算し(S16)、退化基準値が閾値を超えた場合(S17でYes)にkを初期推定に用いる適切な画像枚数とし、スコア最良のgiをカメラ運動と物体形状を求めるための特徴点系列として採用する。
(もっと読む)
161 - 180 / 205
[ Back to top ]