
Fターム[2F065MM06]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874)
Fターム[2F065MM06]の下位に属するFターム
Fターム[2F065MM06]に分類される特許
141 - 160 / 205
画像情報生成方法
【解決手段】走査対象物が1つ以上の表面、および/または、1つ以上の本体、および/または、1つの空間を有し、走査対象物自体、または、走査装置の全体、または、走査装置の一部が走査処理時に動かされ、走査対象物が走査層の領域で走査装置によって走査され、走査対象物を走査する走査ビームのビーム経路が、走査層へ任意の角度で向けられる、および/または、走査層が、走査対象物に対して任意の位置で選択される画像情報生成方法。 (もっと読む)
三次元形状測定システム

【課題】各測定位置で得られた測定データを自動的に同一の座標系で表現できる三次元形状測定システムを提供する。
【解決手段】三次元デジタイザは、測定位置L1で初回の測定動作を行い(♯1)、このときの三次元デジタイザの推定位置を初期値に設定すると(♯2)、次の測定位置L2に移動し(♯3)、測定動作を実行し(♯4)、測定データをPCに送信し(♯5)、位置検出センサの出力信号にから導出した推定位置データをPCに送信する(♯6)。PCは、前記推定位置データを用いて前記測定データの座標変換を行い(♯22)、ICP(Iterative Closest Point)法により座標変換前後の測定データの誤差を算出し(♯23)、この誤差を用いて推定位置データが示す推定位置を補正し(♯24)、この補正推定位置データを三次元デジタイザに送信する(♯25)。
(もっと読む)
炭素繊維布帛の検査装置および検査方法

【課題】
本発明は、炭素繊維布帛の欠点を簡便、かつ、高精度で、信頼性高く検査できる炭素繊維布帛の検査装置および検査方法を提案すること。
【解決手段】
本発明の炭素繊維布帛の検査装置は、炭素繊維布帛を移動させる送出装置と巻取装置と、それらの間に設置する、少なくとも次の(a)〜(h)の手段を備えることを特徴とする炭素繊維布帛の布帛欠点の位置および種類を検出する検査装置である。
(a)照明手段
(b)画像取得手段
(c)遮光手段
(d)撮像した取得画像を数値化した布帛情報に処理する画像処理手段
(e)炭素繊維布帛形態を数値化した布帛情報を予め基準情報として登録しておく記憶手段
(f)布帛情報と基準情報とを比較して、布帛欠点の在否、および、欠点の位置ならびに種類を判別する判別手段
(g)出力手段
(h)炭素繊維布帛の移動量または前記画像取得手段の移動量を検出する移動量検出手段
(もっと読む)
少なくとも1つの曲面の非接触測定のための装置および方法
【課題】最適な測定特性を有するが、断面が少なくとも1つの空間方向において可能な限り小さな寸法を有する測定ヘッドを有する装置の実現。
【解決手段】曲面26の非接触測定のための装置であって、(a)連続したスペクトルを有する光を生成する光源と、(b)光源に対応する光出口面と、(c)光出口面を投影するための色収差を有する光投影システムを有する測定ヘッド10と、(d)光システム22を通して測定される表面に向けられ及びそこから反射される光のスペクトル強度分布を記録する光スペクトル装置と、(e)光システムと表面の間の距離が記録された強度分布が部分的な最大値を有する各波長に対応付けることができるようにする評価ユニットと、を備え、測定される表面26がX方向では平坦であり、光システム22の光軸はX方向において表面26に垂直で、光軸24に対して垂直なこのX方向において光システム22の幅が小さくされている。
(もっと読む)
地上子位置ずれ計測方法、装置、およびプログラム
【課題】地上子の設置位置からの位置ずれ計測を自動的に行う。
【解決手段】軌陸車が進行して地上子位置に来て、地上子上のレーザ輝線照射エリアに輝線が現れたことをデジタルカメラ12、13からの画像によって検出する。輝線が検出されてから、地上子の、軌陸車の進行方向の長さと軌陸車の移動速度とデジタルカメラ12、13のフレームレートで決まる時間軌陸車が移動した時のデジタルカメラ12、13からの画像を処理して、その輝線と軌道面エッジとの交点および該輝線上の地上子中心である3つの特定点を抽出する。該特定点を用いて地上子中心の軌道間中心に対する相対位置と、地上子の上面の軌道上面からの高さを演算する。
(もっと読む)
厚さ計測方法
【課題】レーザ方式厚さ計による計測対象物の厚さ計測において、斜め計測誤差を補正し、正確な厚さ計測を行うことを可能にした厚さ計測方法を提供する。
【解決手段】対向して配置されたレーザ距離計により、ライン上を搬送される計測対象物の厚さを計測する厚さ計測方法において、レーザ距離計の計測値から計測対象物の計測点通過時に想定される表裏面の位置からの変位量を算出し、計測点通過時の計測対象物の反り、垂れ又は撓み形状を推定し、その推定結果に基づいて厚さ計測値の補正を行う。
(もっと読む)
塗布状態評価方法及び塗布状態評価装置
【課題】 被塗装物の帯状の塗布領域に塗布材を連続的に塗布して帯状に形成された塗布膜の塗布状態を評価する場合、3次元曲面上に塗布膜が形成されている場合に、その曲面方向の変化を加味して、また、塗布材を塗布する塗布条件が変化する場合に、その塗布条件の変化を加味して、精度が良い適正な塗布状態の評価を、塗布領域をその長さ方向に複数分割した分割区間ごとに行う。
【解決手段】 塗布領域9をその長さ方向に複数分割した複数の分割区間を設定し、塗布領域9をその幅方向に複数分割して塗布領域9の長さ方向に連続して延びる複数の分割レーンを設定し、塗布領域9にスポット光20aを照射しその反射光を受光する検出ヘッド16をプライマ塗布膜5に沿って走査させ、複数の分割区間の各々について、検出ヘッド16で受光した光の受光データを複数の分割レーン別に処理し、これら受光データに基づいて塗布状態を評価する。
(もっと読む)
水中塗装膜外観検査装置
【課題】貯水タンク内面の塗装膜状態の点検を容易に、かつ、タンクを使用しながらできる水中塗装膜外観検査装置を提供する。
【解決手段】貯水タンク内面3の塗装膜状態を点検すべく水中にてタンク内面3に吸着する水中作業装置本体7と、水中作業装置本体7に設けられ塗装膜を検査する塗装膜検査手段8と、水中作業装置本体7に設けられ健全な塗装膜を傷めない程度に柔らかな材質で形成された車輪9と、水中作業装置本体7に設けられ車輪9を駆動する駆動装置10と、駆動装置10を遠隔操作する遠隔操作手段とを備えたものである。
(もっと読む)
姿勢角検出装置、カメラ
【課題】搭載重量が少なく、搭載スペースが小さい移動体でも姿勢角を計測できるようにすることを目的とする。
【解決手段】まず、水平線検出部9はカメラシステム7により撮影された移動体の前後映像と側方映像とから水平線を抽出する。次に、水平線検出部9は前後映像における水平線の位置と側方映像における水平線の位置とに基づいてピッチ角φとロール角θとを算出する。また、目標抽出部11は前後映像と側方映像との少なくともいずれかから既知物を抽出する。次に、目標抽出部11は前後映像または側方映像に基づいて移動体から既知物への方向を示すベクトルP1を算出する。また、姿勢角算出部14はGPS33により測位された移動体の測位座標と既知物の既知座標とに基づいて移動体から既知物への方向を示すベクトルP0を算出する。そして、姿勢角算出部14はベクトルP0とベクトルP1とピッチ角φとロール角θとに基づいてヨー角ψを算出する。
(もっと読む)
表面歪み欠陥検査装置、検査方法及びコンピュータプログラム
【課題】表面の状態と検査する照明環境などに左右されない表面歪み欠陥検査装置を提供する。
【解決手段】表面歪み検査装置1は、被測定物9の表面に映り込んだ画像によって、被測定物9の表面の歪みを検査する表面歪み検査装置であって、被測定物9の表面の3次元形状データを測定する3次元形状測定装置3と、3次元形状測定装置3で測定した3次元形状データを用いて、被測定物9の表面に特定の画像の映り込みをシミュレーションする制御処理装置2と、前記映り込み再現手段によってシミュレーションされた映り込み画像を表示する表示装置7と、を備える。制御処理装置2は、前記特定の画像と、被測定物9の表面と、映り込みをシミュレートする視点との相対位置を移動させて、映り込み画像を連続して変化させる。また、前記特定の画像は、単色、グレースケールもしくはカラースケールと、縞模様、市松模様もしくは格子模様との任意の組み合わせである。
(もっと読む)
探傷検査装置及び方法
【課題】複雑な形状をした検査対象物の探傷を時間をおいて行う場合であっても作業性及び再現性が良く精度良く探傷検査データを得ることである。
【解決手段】予め定めた固定点Aを基準点として検査対象物11の画像データ及び検査対象物11上を探傷走査した探傷部12の走査軌跡データをセンサ部15で計測し、画像処理部19は計測した画像データに基づいて検査対象物の3次元形状データ及びその3次元形状データ上での探傷部12の走査軌跡データを演算し、座標補正部21は記憶部20に記憶された過去の検査対象物11の3次元形状データとの座標のずれを補正し、現在の検査対象物の3次元形状データを過去の検査対象物の3次元形状データの座標に一致させ、表示装置22に過去の探傷部の走査軌跡データを案内表示する。
(もっと読む)
車線認識装置および車線認識方法
【課題】車両から車線までの距離の検出精度が向上した車線認識装置を提供する。
【解決手段】車両の側面に沿って延びる車線を撮像する撮像手段100と、車線の撮像時における車両のロール角度を検出する角度検出手段200と、撮像される車線の画像データおよび検出されるロール角度に基づいて、車両から車線までの距離を算出する算出手段300と、を有する。
(もっと読む)
座標変換関数の取得方法および座標変換関数取得用プログラム
【課題】3次元形状測定装置に関する座標系によって表された3次元形状データを支持機構に関する座標系によって表された3次元形状データに変換するための座標変換関数を、作業性および経済性よく取得する。
【解決手段】アーム座標系A1のZ軸が基準座標系SのX−Y座標平面に直交する2つの位置ごとに、同Z軸線回りにおける2つの測定位置から基準物体50を測定し、X−Y座標平面内における各定点によって定義される円を用いて座標変換関数FC1C3を計算する。次に、基準座標系SのX−Z座標平面に直交する連結部25c,26aの軸線回りにおける3つの測定位置から基準物体50を測定し、X−Z座標平面内における各定点によって定義される円を用いて座標変換関数FC3A2を計算する。そして、座標変換関数FC1C3と座標変換関数FC3A2とを用いて座標変換関数FC1A2を計算する。
(もっと読む)
基板の両面形状測定方法及び装置
【課題】 表面および裏面の両面形状を同時に高精度に測定する基板の両面形状測定方法及び基板の両面形状測定装置を提供する。
【解決手段】 測定装置本体1は、ベッド2上に垂直状態に配置した縦型定盤3の基準面3aと、それにほぼ平行に被測定基板Pを保持する基板保持機構4と、X軸移動機構の変位計走査コラム7を有する。X軸移動機構は、第1(第2)の変位計を搭載する第1のY軸移動機構、第3の変位計を搭載する第2のY軸移動機構を備え一対のV溝8に沿って水平軸方向に移動する。Y軸移動機構は垂直軸方向に移動する。第1(第2)の変位計の走査により基板Pの第1の被検面の形状を測定し、第3の変位計の走査により第2の被検面の形状を測定する。また、第1(第3)の変位計により基準面3aと第3の変位計の走査の2次元の真直誤差を測定し上記形状を補正する。
(もっと読む)
スペックルナビゲーションシステム
1実施形態は、表面(102)の連続する画像における画像特徴の変位を求めることによって、データ入力装置と該表面との間の相対的な動きを検出するためのレーザー位置決め装置に関連する。この装置は、平面状基板(102)、及びコリメーティングレンズ(108)を具現化する透明な封入剤を含む単一の一体型パッケージを形成する。コヒーレント光源(104)、センサーアレイ(106)及び関連する回路が共に平面状基板上に構成される。別の実施形態は、データ入力装置と表面の間の相対的な動きを検出する方法に関連する。コヒーレント光は、レーザーから放射され、平行化されて、所定の直径D及びほぼ均一な位相面を有する平行化照射ビームを形成する。スペックルパターンが、平行化照射ビームが表面に当たることによって生成されて、センサーアレイによって検出される。他の実施形態も開示される。 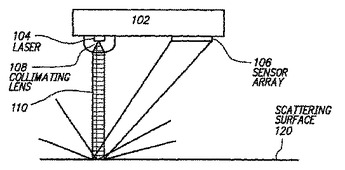 (もっと読む)
(もっと読む)
機器位置決め装置と機器位置決め装置用回転機構
【課題】 簡単な構成で一軸はもとより複数軸の構成を実現することができる機器位置決め装置と機器位置決め装置用回転機構を提供すること。
【解決手段】 係合凹部を備えた柱体と、上記柱体の係合凹部に移動可能に係合するとともに自身の係合凹部を備えていて該係合凹部を介して任意の機器が取り付けられる移動体と、上記移動体をZ方向に移動させる移動手段と、を具備したものであれ、比較的簡単な構成で所望の機器位置決め装置を提供することができる。
(もっと読む)
形状測定装置,形状測定方法
【課題】形状測定対象の試料の大きさにかかわらず,高い分解能での形状測定を行うことが可能な形状測定装置,及び形状測定方法を提供すること
【解決手段】所定の基準平面Cに沿って試料11に対向配置された第1の集光レンズ13,前記基準平面からの距離が各々異なる複数の出射位置から複数の測定光を前記第1の集光レンズ13に向けて出射するLEDアレイ12,前記試料11により反射された反射光を集光する第2の集光レンズ13,前記第2の集光レンズ13に集光される前記反射光の強度を検出する受光素子アレイ9の相互の位置関係を保持して光学系βとして形成し,前記光学系βと前記試料11との前記基準平面Cに略平行な方向(走査方向)に相対位置を変位させる。
(もっと読む)
カメラ及び標識を用いた移動ロボットの測位システム及び方法
【課題】室内空間においてn個の標識とカメラとを用いて、照明変化に拘わらず移動ロボットの自己位置及び方位情報を実時間で測定できるシステム及び方法を提供する。
【解決手段】カメラ及び人工標識を用いて移動ロボットの自己位置を測定する測位システムは無線機能を用いた非可視光線領域のLED点滅機能を有する人工標識、カメラ、天板に装着した標識を点滅させた後、フィルタを装着したカメラの映像により標識の位置及びIDを確認するモジュールと、映像の二つの標識を用いてロボットの位置及び方位を計算するモジュールと、標識を装着する天板の高さが異なる場合にロボットの位置を計算するモジュールと、作業空間に新たな標識を装着する場合に絶対座標上の標識の位置を計算するモジュールとを含む。二つの標識のみで位置を計算し、ロボットと標識との距離を必要としないため、標識の数の増加により新たな空間でもロボットの位置/方向を測定できる。
(もっと読む)
障害物検出装置及びこれを含む車両制動システム
【課題】障害物の画像を確認し難い状況であっても、接近した障害物がある場合にはこれを確実に検出できる障害物検出装置を提供する。
【解決手段】車両周辺に探索波を発射して物体からの反射波に基づいて当該物体を検出する第1検出手段2と、車両周辺を撮像した画像に基づいて物体の形状(高さ、幅の情報など)を検出する第2検出手段3と、前記第1検出手段からの第1検出信号と前記第2検出手段からの第2検出信号とに基づいて、車両周辺の物体が障害物であるか否かを判断する障害物判断手段4とを、備えた障害物検出装置であって、前記障害物判断手段4は、前記第1検出信号に前記車両からの距離が所定距離以下である物体を確認した場合には、前記第2検出信号の結果にかかわらず、当該物体を障害物として検出する。
(もっと読む)
移動量演算装置
【課題】カメラが自動車等の移動体に搭載されて自在に移動する場合に於いて、その移動量もしくは移動距離を、比較的小さな処理負荷で算出できるようにする。
【解決手段】カメラで撮像したフレームから所定形状のマッチング検査領域を切り出してフレーム間でパターンマッチングを行い、同一の特徴点に対応する被写点の位置をフレーム毎に算出し、算出した両被写点位置間の変位量を求めて両フレーム間での移動量とする移動量演算装置。カメラが搭載される移動体の舵角を検出する(S02)手段を有し、マッチング検査領域を切り出す手段は第1フレームに続く第2フレームのマッチング検査領域を前記検出した舵角に応じて第1フレームのマッチング検査領域に対して傾斜させて切り出し(S03)、両被写点位置間の変位量を求める手段は当該求めた変位量を前記移動体の移動量とする(S09)。
(もっと読む)
141 - 160 / 205
[ Back to top ]