
Fターム[2F065PP11]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708)
Fターム[2F065PP11]の下位に属するFターム
Fターム[2F065PP11]に分類される特許
201 - 220 / 426
計測方法、ステージ移動特性の調整方法、露光方法及びデバイス製造方法
【課題】
走査型露光装置を用いる基板上のショット配列の精度を計測する計測方法において、より短時間でショットの配列精度を評価する計測方法を提供する。
【解決手段】
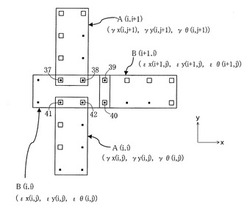
第1の露光においてウェハ上に転写されたショットA(i,j+1), A(i,j)と、そのウェハを90°回転させた第2の露光においてウェハ上に転写されたショットB(i,j), B(i+1,j)とを重畳させ、その重畳領域において、ショットA(i,j+1), B(i+1,j)に含まれる中実箱型マークとショットB(i,j)に含まれる中空箱型マークが重なり合い、ショットA(i,j)に含まれる中空箱型マークとショットB(i,j)に含まれる中実箱型マークが重なり合う。形成した重ね合わせマーク37〜42を、全ての重畳領域内のマークに関して計測し、これら重畳領域を形成する全てのショットの相対的な位置誤差および回転誤差を一括して演算する。
(もっと読む)
渦巻きばねの形状を測定する装置、方法、及びプログラム

【課題】 渦巻きばねの撮影画像から内フックや外フックの位置を正しく特定する。
【解決手段】 形状測定装置は、渦巻きばねを撮影した撮影画像を入力する画像入力手段と、前記撮影画像を極座標変換した極座標画像を作成する画像変換手段と、前記極座標画像を用いて、前記撮影画像中の内フックが撮影されている内フック位置、及び/又は、外フックが撮影されている外フック位置を特定するフック位置特定手段を備えている。この装置によると、渦巻きばねの撮影画像から内フックや外フックの位置を正しく特定し、渦巻きばねの形状測定を正しく行うことができる。
(もっと読む)
分光光学系および分光測定装置
【課題】屈折・回折型レンズを用いたSchupmann光学系で配置される分光光学系により垂直落射照明を可能とし、かつ、DUV−UV(200nm〜400nm)領域の広帯域色補正を行うことを可能とする分光光学系および分光測定装置を提供する。
【解決手段】光源110と、視野絞り111と、リレーレンズ系140と、フィールドレンズ系150と、結像レンズ系160と、分光器170とを有し、リレーレンズ系140、フィールドレンズ系150および結像レンズ系160は、屈折型レンズおよび/または回折型レンズによるSchupmann光学系で配置され、かつ、リレーレンズ系140と結像レンズ系160のいずれか一方に回折型レンズを有する分光光学系であって、フィールドレンズ系150が2枚以上のレンズで構成され、そのうちの1箇所においてレンズが所定の距離だけ離して配置されている。
(もっと読む)
積層電子部品の変位測定装置及び方法
【課題】被測定物を再利用可能な状態で簡便かつ良好に固定保持することができ、気温等の影響を受けることなく精度の高い変位の測定を行なうことができる積層電子部品の変位測定装置及び方法を提供する。
【解決手段】被測定物50をテーブル30の吸引穴40A〜40Dのいずれかに所望の向きで置くとともに、開閉弁22A〜22Dを「開」として真空ポンプ14で吸引すると、被測定物50はテーブル30上に吸着される。位置調整部64でレーザ照射検出部60の位置を調整し、レーザ光を被測定物50に照射する。被測定物50を横に置けばセラミックス積層体52にレーザ光が当たり、被測定物50を縦に置けば電極54にレーザ光が当たる。この状態で、通電部62から被測定物50に対して所定の通電を行なうと、被測定物50が変位し、レーザ光に周波数変化が生ずる。これをレーザ照射検出部60で検出することで、被測定物50の変位が測定される。
(もっと読む)
位置情報取得システムおよび位置情報取得方法
【課題】容易に設置でき、しかも特定箇所の正確な位置情報を安定して取得できる位置情報取得システムを提供する。
【解決手段】伝送用光ファイバ線路2と、伝送用光ファイバ線路2の少なくとも1箇所に設けられた位置表示モジュール3と、伝送用光ファイバ線路2に試験光を入射する光パルス試験器10と、を備えた位置情報取得システム1。位置表示モジュール3は、伝送用光ファイバ線路2に歪みを印加する歪印加部5を内蔵している。光パルス試験器10は、戻り光に基づいて歪印加部5における歪みを検出可能である。
(もっと読む)
コイルのセンター検出システム及び方法
【課題】簡易な構成でコイルの板幅方向のエッジ位置を検出し、コイルの板幅方向のセンターを検出できるようにする。
【解決手段】鋼板を巻き取ってなるコイルCの表面をその径方向から撮影する撮像装置100と、撮像装置100の撮影方向と略同方向からコイルCの表面に光を照射する光源200とを備える。検出装置300は、撮像装置100による撮影画像をモニタ306に表示するとともに、撮影画像に基づいてコイルCの板幅方向のエッジ位置を検出し、その検出したエッジ位置を用いてコイルCの板幅方向のセンターを検出する。そして、コイルCの板幅方向のセンターと予め設定されているコイルスキッド400のセンターとのずれ量を求めて、そのずれ量が所定の量を超えている場合、オペレータに警告を行う。
(もっと読む)
外形検査システム
【課題】検査対象物の表面が光沢を有していても、また検査台が鏡面状であってもコントラストが良好でありかつ輪郭が明瞭な成形物の画像が得られる外形検査システムを提供する。
【解決手段】検査台上の被検査物の外形を検査する外形検査システムにおいて、撮像装置及び直線LED照明を用い、撮像装置を被検査物の直上位置に配置し、直線LED照明からの照明光線が直接被検査物に照射されずに検査台に照射される位置に直線LED照明を配置してなる外形検査システム。
(もっと読む)
内視鏡用測定アタッチメント及び内視鏡システム
【課題】測定対象が大きくても内視鏡を利用して精度良く測定対象の寸法を測定することを可能とする内視鏡用測定アタッチメント及び内視鏡システムを提供する。
【解決手段】内視鏡用測定アタッチメント30は、内視鏡挿入部3Aの先端部3cに装着されて、内視鏡挿入部3Aが有する測定手段6を利用して測定対象の寸法を測定するためのもので、内視鏡挿入部3Aの中心軸に略直交する測定方向Pの一方側に向かって測定手段6が有する基準点O6から測定対象の一端部までの距離を測定手段6によって測定可能に、内視鏡挿入部3Aの先端部3cに固定される本体ブロック31と、本体ブロック31から測定方向Pの一方側と反対側の他方側に向かって突出し、測定対象の他端部に当接可能な当接部51aを有する当接ブロック32とを備える。
(もっと読む)
パターン検査装置及びパターン検査方法
【目的】パターンの用途或いは種別によって検査する際の判定閾値を多段階に変更可能な装置を提供することを目的とする。
【構成】パターン検査装置100は、パターン形成されたフォトマスク101の光学画像データを取得する光学画像取得部150と、フォトマスク101のパターン形成の基となる設計パターンデータを入力し、参照画像データを作成する参照回路112と、設計パターンデータに定義される少なくとも一部のパターンを包含する領域データとパターンの重要度情報とを入力し、領域データを用いて重要度情報に基づいた多値の解像度で示される画素値を有する領域画像データを作成する展開回路140と、領域画像データの各画素の画素値によって定まる複数の閾値あるいは複数の欠陥判定処理方法の1つを用いて、領域画像データが示す領域内の光学画像データと参照画像データとを画素毎に欠陥判定する比較回路108と、を備えたことを特徴とする。
(もっと読む)
輪郭形状測定方法
【課題】歯車歯形、ネジ形状、歯形・ネジのピッチなどを精度良く、しかも効率良く測定可能な非接触型の測定方法を提案すること。
【解決手段】輪郭形状測定方法では、被測定物体1の輪郭形状の理想輪郭形状に沿って等間隔の空隙3を作り出す補償用輪郭形状2aを備えた補償用物体2を用意し、被測定物体1の理想輪郭形状からの偏差となる空隙3の変化を、光源4から空隙3の測定点P1に照射された光の通過光量の変化として、受光装置5において読み取ることができる。従来の輪郭投影機に見られるような画像分解能に関する光学的限界に支配されず、高精度の受光素子の有する光強度変化に関する分解能の限界まで輪郭形状の測定分解能を高めることが出来る。
(もっと読む)
格子構造の検査装置および格子構造の検査方法
【課題】 個々の凹部や凸部の一部に形成されている小さな欠陥と、凹部と凸部とにまたがって形成されている格子ピッチよりも大きな欠陥とを両方一緒に検出する。
【解決手段】 検査対象物OBを固定した固定治具10を回転させながら回転軸方向に移動させるとともに、検査対象物OBの微細格子構造Gにレーザ光を照射し、その反射光の強度と偏光状態とを検出する。反射光の強度が基準レベルより低下している場合には、その照射位置に、凹部と凸部とにまたがって形成されている格子ピッチよりも大きな欠陥が存在すると判断する。また、上記大きな欠陥が存在していると判断した部位を除く領域において、反射光の偏光状態が理想の偏光状態に対して許容値を超える差を生じている場合には、その照射位置に、個々の凹部や凸部の一部に形成されている小さな欠陥が存在すると判断する。
(もっと読む)
形状計測システム
【課題】ロール成形時における製品のダイナミックな変形を高速度カメラにより瞬時に判断し、その矯正のためのパラメータを自動計算するインラインロールの形状計測システムを提供すること。
【解決手段】ロール成形機3によって連続的に成形された後に走行切断機5によって所定長さに切断される金属製品7の形状を画像処理によって計測する形状計測システム21であって、移動する金属製品7の上方からレーザ光を照射するレーザ光照射手段25と、前記金属製品7における前記レーザ光が照射されている位置を撮像する撮像手段23と、前記撮像手段23によって得られた画像情報を処理する計算手段26とを備え、前記撮像手段23は、前記走行切断機5の下流側において前記金属製品7を撮像し、前記計算手段26は、前記画像情報の時間変化に基づいて、前記金属製品7の基準形状に対する変形量を計測する。
(もっと読む)
標線位置測定装置、標線位置測定用プログラム、および標線マーク
【課題】従来は、白黒の標線マークをビデオカメラで撮像しているので、撮像素子間の補間計算まで行って測定分解能を高めることはできなかった。
【解決手段】標線マークM1には、X座標=0を挟んで±πの範囲内に連続した黒色濃度分布が、上下対称に印刷されている。その対称軸は、標線G1と一致している。ビデオカメラ6で標線マークM1を撮影し、コンピュータ8により標線位置を算出する。
(もっと読む)
対象物の複数の側面を画像化するための装置および方法
【課題】対象物の複数の画像を獲得するための装置を提供する。
【解決手段】対象物が内部を通って4つの画像化領域に進む複数のトンネルを含む4つの長手方向移送機により、ガス圧力の差を利用してトンネルを通じて対象物を搬送し、少なくとも1つの長手方向移送機が特定の位置に配置されたときに、少なくとも1つのトンネルの少なくとも実質的な部分を露出させる可動部を有する4つの長手方向移送機と、対象物の長手方向軸線のまわりで対象物を回転させるように構成された3つの回転モジュールであって、各回転は、2つの長手方向移送機の間に位置付けられる、3つの回転モジュールと、4つの画像化領域のそれぞれの中で、対象物の画像を得るように構成された撮像装置30と、を含む。
(もっと読む)
光ファイバセンサユニット
【課題】正確な圧力値を測定でき、かつ低コストに製造が可能な光ファイバセンサユニットを提供する。
【解決手段】光ファイバセンサユニット10は、互いに並列して配置した2本の光ファイバセンサケーブル11,11どうしを、所定の間隔を開けて接続部12によって接続(連結)してなる。コア21の外周面21aは、中間層(スキン層)24によって被覆されている。この中間層(スキン層)24は、保護層26との間で圧力測定用光ファイバ25を保持する。中間層24の外周面24aには、圧力測定用光ファイバ25が螺旋状に巻回される。
(もっと読む)
電子部品の外観検査方法
【課題】シールド用の蓋体を設けた電子部品において、蓋体と回路を実装した基板との接合状態を高精度に検査することが可能な外観検査方法を提供する。
【解決手段】部品が実装された基板2と、この基板2の少なくとも一面を覆うとともに前記基板2に設けた電極4に半田5を介して接合、保持された金属製の蓋体3とからなる電子部品の検査方法であって、前記蓋体3と基板2の接続部6の裏面より一定照度の光を照射することによりハレーションを発生させて、蓋体3と基板2との間の凹部20を他の部分より暗く浮かび上がらせることで不良箇所を検出する電子部品の外観検査方法とした。
(もっと読む)
画像処理による非接触式位置計測装置
【課題】より正確に且つ高精度に性能試験中の車両の位置を計測することが可能な画像処理による非接触式位置計測装置を提供する。
【解決手段】ローラ21上に設置されホイル11を回転させて性能試験を行う車両1の位置を計測する画像処理による非接触式位置計測装置を、車両1に車両1の前後方向に直交するように直線状に施される第一のマーカ31と、走査方向が第一のマーカ31の長手方向に直交するように配置されて第一のマーカ31を撮像するラインセンサ4と、ラインセンサ4によって撮像された画像上の第一のマーカ31の位置を検出し、検出した第一のマーカ31の位置に基づいて車両の前後方向の位置を算出する画像処理部5とから構成した。
(もっと読む)
雄螺子の測定装置及び判定装置
【課題】簡単な構造で短時間で螺子部の螺旋形状を非接触状態で測定する。
【解決手段】雄螺子10の螺子部13に測定光を照射して得られる投影光により螺子部13の形状を測定する雄螺子10の測定装置20であり、螺子部13を突出させた状態で雄螺子10を支持する支持部21と、測定光を螺子部13の一方の側方側から照射可能な照射部と、測定光により得られる螺子部13の軸線Lに沿う最大断面形状の投影像の外縁により、外縁に対応する螺子部13の検出位置を検出する検出部35と、検出位置と螺子部13の軸線Lとの間の垂直距離を演算することで、螺子部13の螺旋形状の半径を求める処理部とを備えている。
(もっと読む)
光波干渉測定装置
【課題】非球面光学素子の表面形状を簡易かつ低コストで短時間のうちに測定し得る光波干渉測定装置を提供する。
【解決手段】光源11からのレーザー光束がハーフミラー13において反射され、コリメートレンズ22を介して基準板25に照射され、基準面25aにおいて、一部は参照光束として反射され、その余は透過される。透過光束は、波面形状可変レンズ15において、該光束が被検非球面レンズ17の各表面位置に所望の角度で入射するように出力される。該光束はレンズ17で反射されて被検光とされ、基準面25aに戻る。この被検光と参照光とによる干渉縞が干渉計CCDカメラ31により撮像され、その干渉縞情報は制御演算部51に入力され、該制御演算部51からは、その干渉縞をヌル縞とすべく、レンズ15に対してレンズ形状制御信号を出力して、その屈折力分布を変化させる。この出力信号値に基づいてレンズ17の表面形状が演算される。
(もっと読む)
電子部品の実装方法、及び表面実装機
【課題】複数個の位置基準マークを複数台のカメラにより分担して撮影し、基板上に付された各位置基準マークの位置を正確に画像認識する電子部品の実装方法、及び表面実装機を提供する。
【解決手段】表面実装機を用いた電子部品の実装方法であって、(1)予め設定された基台上の各カメラ撮影位置A、Bに前記各基板認識カメラをそれぞれ移動させて、各カメラ撮影位置近傍に位置する位置基準マークFa、Fbの画像を撮影し、(2)前記各カメラ撮影位置A、Bに対する現実の撮影位置の誤差を算出、(3)前記撮影により得られた各カメラ撮影位置A、Bでの各画像データと、前記誤差とに基づいて前記基台上における位置基準マークFa、Fbの位置を認識し、認識された位置基準マークFa、Fbの位置に従って前記基板に対する電子部品の実装位置を決定する。
(もっと読む)
201 - 220 / 426
[ Back to top ]