
Fターム[2F065QQ08]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 閾値の決定、変更 (724)
Fターム[2F065QQ08]に分類される特許
41 - 60 / 724
検査装置、検査方法及び半導体装置の製造方法
【課題】検査対象からの反射光角度の変化に基づいて基板の欠陥を精度よく検査することができる検査装置を提供すること。
【解決手段】本発明に係る検査装置は、赤外光を出射する光源11と、光源11から出射される赤外光を平行光としてウエハ30に略垂直に入射させ、当該ウエハ30からの反射光を導く光学系と、光学系により導かれる反射光のうち、正反射光以外の光を検出するIRカメラ19、20とを備え、光源11からの赤外光を導光する光ファイバ13の出射端面面は、光学系の瞳位置に配置されている。
(もっと読む)
走行体の停止位置検出方法、及び走行体の停止位置検出装置

【課題】走行体の前面を斜めから撮像した場合であっても、走行体の先端部位置と基準停止位置とのズレ距離量を正確に求めることができ、走行体が基準停止位置に正確に停止しているか否かを確実に判定する。
【解決手段】走行体3の停止位置検出方法は、撮像手段により、走行体3が停止する位置として予め設定された基準停止位置PSと、この基準停止位置PSに対し上下方向又は左右方向にずれた場所に存在する走行体3の端部位置PFとが同時に写り込んだ撮像画像Fを取得するステップと、取得した撮像画像Fから、基準停止位置PSと走行体3の端部位置PFとの実空間における水平方向のズレ距離量を算出するステップと、得られたズレ距離量を基に、走行体3が基準停止位置PSに停止したか否かを判定するステップと、を有する。
(もっと読む)
ディンプル位置検出装置
【課題】ディンプル頂点の位置を正確に検出することができるディンプル位置検出装置を提供する。
【解決手段】ロードビームに形成されたディンプルの位置を検出するためのディンプル位置検出装置であって、ディンプルに向けて光を照射する照明装置と、その反射光を受光する撮像装置と、得られた画像を二値化する画像処理部とを備えている。画像処理部は、二値化レベルを最大にする手段S2と、反射光の画像を二値化する手段S3と、二値化レベルを超えた光点領域(オン領域)の面積が所定値であるか否かを判定する手段S4と、光点領域の面積が所定値未満のときに二値化レベルを下げる手段S6と、光点領域の面積が所定値に達したときに光点領域の重心の位置を算出する手段S8とを具備している。
(もっと読む)
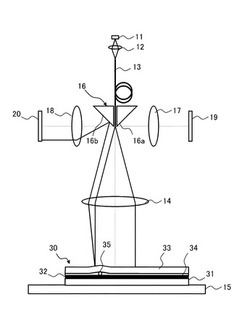
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
タイヤの欠陥検出方法
【課題】 タイヤ表面の薄広凸欠陥を高精度に検出することができるタイヤの欠陥検出方法を提供する。
【解決手段】 ステップS1を開始するまでに、予め連続的にスリット光像を含む2次元画像を取得しておく。ステップS1では、撮像された複数の2次元画像データから、スリット光像を抽出する。ステップS2では、抽出されたスリット光像から偏心によるぶれである偏心成分を除去する。ステップS3では、偏心成分を除去した光像に基づいて特徴量を算出し、ステップS4で、算出された特徴量に基づいて薄広凸欠陥を検出する。
(もっと読む)
光検出装置および電子機器
【課題】単一の受光素子を用いた簡単な構成による小型かつ低コストな近接/方向センサとして、対象物体の近接/非近接状態の変化とそれに直交する移動方向を、同時に最も効率よく検出して人体の動作に十分に追随させるための光検出装置を提供する。
【解決手段】受光素子200は、反射光103が直接入射する第1のウェル301と、第1のウェル301を挟んで対向し、かつ反射光103は遮光されて入射しない第2のウェル302及び第3のウェル303とを備えている。受光素子200による受信信号は、第1のウェル301の出力と第2のウェル302の出力との和、及び、第1のウェル301の出力と第3のウェル303との出力の和を、時間軸上で交互に出力する。この受信信号に基づいて、光検出装置天面の法線方向である第1の軸方向に沿う対象物体の近接状態と、前記対象物体の近接状態が変化した際の移動方向とが判定される。
(もっと読む)
封止容器の検査方法及び検査装置
【課題】目視に頼っていた封止容器のリッドの位置ずれ検査を光切断方式を用いて自動化する方式と検査装置を提供する。
【解決手段】パッケージ36にリッド37を接合した封止容器の上面へスリット光を照射し、スリット光に対し封止容器を相対的に移動させて封止容器の複数箇所にスリット光を照射し、パッケージ36の厚みにより分離したスリット光の端点の位置情報を光切断方式を用いて測定し、測定した平面方向の位置情報と予め定めた基準値とを比較する事によりパッケージ36に対するリッド37の位置ずれと傾きを判断する。
(もっと読む)
アクチュエータの行程位置検知装置
【課題】パターンが経年劣化等の変化することにより、位置検知用のセンサからの出力信号が変化したとしても、行程位置を把握することができるアクチュエータの行程位置検知装置を提供する。
【解決手段】油圧シリンダ1(アクチュエータ)のロッド4に、ストローク方向の範囲内において変化がない基準部とストローク位置を特定できるように変化させる符号化部とを有するパターンXを描画して、基準部を検知する基準センサ(基準検知部)が出力する基準信号に基づき位置検知センサ(位置検知部)が出力する位置信号を判断して、ストローク位置を把握する制御装置とを備える。
(もっと読む)
搬送量計測装置および記録装置
【課題】データ処理量を増大させることなく、パターンマッチングに適したパターンを正確にピックアップし、記録用紙上の移動量計測用パターンの正確な移動量を検出する。
【解決手段】記録媒体を所定の搬送方向に搬送する搬送手段を備え、搬送される記録媒体に記録ヘッドを用いて画像を記録する記録装置における記録媒体の搬送量を計測する搬送量計測装置であって、搬送される記録媒体に対して所定範囲の撮像領域を有し、記録媒体の搬送量を計測するための移動量計測用パターンの抽出および移動量計測用パターンの移動量を算出するための画像データを取得するイメージセンサ101−1と、搬送方向のイメージセンサ101−1の上流側に配置された所定範囲の撮像領域を有し、移動量計測用パターンを抽出する範囲を選択するためのイメージセンサ101−1よりも低解像度の画像データを取得するイメージセンサ101−2を有する。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
しわ検出装置およびしわ検出方法
【課題】勾配に基づいて、しわを特定できるしわ検出装置を提供する。
【解決手段】しわ検出装置100は、電極およびセパレータが積層されてなる積層体40に対して相対的に移動しながら、最外層のセパレータに対して、スリット光を投光する投光部110と、セパレータ上のスリット光の形状を撮影するカメラ120と、撮影されたスリット光の形状に基づいて、セパレータの表面形状を検出し、検出した表面形状に基づいて、セパレータの勾配を算出し、算出した勾配に基づいてしわを判定する制御部130と、を有する。
(もっと読む)
画像処理方法
【課題】複数個束ねられた偏平状態の段ボール箱の接合間隔を検査するために、検査画像に含まれる接合間隔の位置を高い精度で特定することが可能な画像処理方法を提供する。
【解決手段】境界検出ステップS1で、撮影画像における段ボール箱積層体の側面部分と背景部分との境界位置を検出し、濃度補正ステップS2で、検出された境界位置によって特定される段ボール箱積層体の側面部分を対象として濃度補正処理を行う。投影ステップでは、濃度補正処理が行われた側面部分に対して、積層方向に直交する方向に投影処理を行うことで、積層方向に直交する方向の1次元濃度データを得る。組み合わせ検出ステップで、1次元濃度データに対して、濃度が低下する範囲である谷部分とこの谷部分に隣接する、濃度が上昇する範囲である山部分との組み合わせを検出すると、決定ステップS4で、検出された組み合わせの中心位置を求め、接合間隔列の中央位置として決定する。
(もっと読む)
周辺監視装置
【課題】簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供する。
【解決手段】他車両22が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両22の位置を測定する周辺監視装置であって、自車両21進行方向の路面上の所定領域を検出領域Rとして、該検出領域Rに、他車22両が路面上の所定の領域に形成した前記光投影パターンを検出する検出手段と、前記検出手段で検出された、自車両21から見た前記光投影パターンに基づいて、自車両21の進行方向に対する他車両22の進行方向の角度を測定する測定手段とを備える。
(もっと読む)
特定欠陥の検出方法、特定欠陥の検出システムおよびプログラム
【課題】ウェーハの表面に生じうる特定欠陥をより確実に検出することが可能な検出方法、検出システムおよび検出プログラムを提供することを目的とする。
【解決手段】本発明の特定欠陥の検出方法は、ウェーハの表面に光を照射して該ウェーハの表面上の欠陥の位置に対応して検出される輝点の面内位置情報である輝点マップを取得する工程(S101)と、前記輝点マップにおいて、特定欠陥の発生が予想される領域である判定対象領域と、該判定対象領域以外の所定領域である参照領域とを特定し、前記判定対象領域における輝点密度の、前記参照領域における輝点密度に対する比を算出する工程(S102)と、算出された前記比の値に基づいて、前記特定欠陥の発生の有無を判定する工程(S103)と、を有することを特徴とする。
(もっと読む)
3次元形状モデル高精度化方法およびプログラム
【課題】被写体を撮影した画像と背景のみを撮影した画像から、被写体3次元モデルを高精度に復元する方法を提供する。
【解決手段】各カメラの被写体シルエット画像から視体積交差法により復元されるVisual Hullの表面に存在するボクセルのオブジェクトらしさに関する尤度を算出し、オブジェクトらしさに関する尤度をもとにVisual Hullの整形を行い、Visual Hullの整形が収束するまで、算出と整形を繰り返し適用する。上記のVisual Hullから獲得される3次元形状モデルのテクスチャ状態を評価し、3次元形状モデルのテクスチャ状態をもとに3次元形状モデルの整形を行い、3次元形状モデルの整形が収束するまで、評価と整形を繰り返し適用する。
(もっと読む)
欠陥位置情報生成装置、欠陥確認システム及び欠陥位置情報生成方法
【課題】欠陥箇所に直接マーキングすることなく、検査官が長尺シート材における欠陥箇所をすみやかに特定することのできる欠陥位置情報生成装置等を提供する。
【解決手段】原点Mと、当該原点を識別するための記号との組合せが、長手方向に複数印字された長尺シート材Sを撮影した撮影画像において、原点M及び欠陥Dの位置を特定し、特定した原点Mのうち欠陥Dに1番目又は2番目に近い原点Mを基準として当該欠陥Dの位置を示す欠陥座標を算出する。基準となった原点Mと組合せをなす記号を示す記号情報と、算出した欠陥座標を示す欠陥座標情報とを含む欠陥位置情報を生成する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
コンクリート表面の閉合ひび割れ検出方法
【課題】コンクリート表面を撮像した元画像データを画像処理して閉合ひび割れを自動的に抽出する。
【解決手段】上下左右の矩形の処理領域を一般的に想定される閉合ひび割れのサイズをカバーする面積だけオーバーラップするように分割した複数の矩形の処理領域の元画像に対して画像処理を行い、撮影解像度以上のサブピクセル精度でひび割れ線分を抽出し、領域解析により一定以下の面積の微粒子を除去し、近接する線分同士を連結して閉合領域を生成する。全ての領域に対してラベル付けを行い、各領域の上下左右の端部の座標値が前記矩形の処理領域の範囲内にあるか否かを判定し、範囲内ならば閉合ひび割れと決定する。
(もっと読む)
ノズル外観検査装置、およびノズル外観検査方法
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
エッジ検出装置及びそれを備えた画像形成装置
【課題】検出手段の光源の発光波長や記録媒体の反射率特性に依存することなく、様々な種類の記録媒体のエッジを短時間で正確に検出する。
【解決手段】移動している記録媒体Sの端部を検出するものであって、記録媒体Sよりも反射率の高い反射面31aを備えた反射手段31と、記録媒体S及び前記反射手段31の反射面31aに光を照射する光源と、記録媒体Sの幅方向に配列された光電変換素子画素を有し、光源から照射されて記録媒体S及び反射手段31の反射面31aで反射された反射光を光電変換素子画素で受光する受光手段と、受光手段において、予め設定された判定閾値よりも高い出力をする光電変換素子画素の領域を記録媒体SのエッジSaとして判定する制御手段を有する。
(もっと読む)
41 - 60 / 724
[ Back to top ]