
Fターム[2F065QQ08]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 閾値の決定、変更 (724)
Fターム[2F065QQ08]に分類される特許
61 - 80 / 724
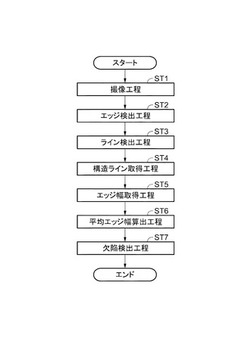
欠陥検出方法及び欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥を検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】欠陥検出方法は、撮像工程により被検査物を撮像し、エッジ検出工程により得られた画像データに基づいて、構造パターンの外周形状であるエッジを検出し、ライン検出工程により、エッジの最外周画素の集合であるラインを検出し、構造ライン取得工程によりエッジが境界となる複数の構造パターンに対してそれぞれに接するラインである構造ラインを取得し、エッジ幅取得工程により2つの異なる構造ライン間の距離をエッジ幅として取得し、平均エッジ幅算出工程により同じ構造ライン上の任意の2点を始点及び終点として設定し、始点から終点までの平均エッジ幅を取得する。そして、欠陥検出工程により、平均エッジ幅とエッジ幅とを比較し欠陥を検出する。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置

【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
マルチカメラのキャリブレーション用全周フィールド
【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
グリーンタイヤのキャップトレッドのオフセットを測定する測定方法、測定装置及び測定プログラム
【課題】グリーンタイヤのキャップトレッドのセンターオフセット位置を自動で検出する。
【解決手段】グリーンタイヤのキャップトレッドのオフセット測定方法であって、回転自在なドラム上に載置されたグリーンタイヤの形状を計測する工程と、計測結果に基づきグリーンタイヤの基準高さhを算出する工程と、基準高さhにおけるキャップトレッドの幅をセリアル側及び反セリアル側で算出する工程と、算出したキャップトレッドの幅に基づきキャップトレッドのセンターオフセットの異常を判断する工程と、を有する。
(もっと読む)
しわ発生判別方法、プログラム、速度計測装置、形状計測装置、しわ発生判別装置及び画像形成装置
【課題】幅広いシート材種に対してシート材のしわ発生の余裕度を評価し、しわの発生を予防する技術を提供する。
【解決手段】波打ち形状算出手段が、ニップ部におけるシート材の搬送方向と直行する方向の搬送速度分布を記憶手段から読み出して(S1)、搬送速度分布からシート材の波打ち形状を算出し(S2)、しわ発生判別手段が、波打ち形状算出手段により算出された波打ち形状に基づいてシート材にしわが発生するか否かを判断する(S3、S6、S7)。
(もっと読む)
球体の球径寸法測定方法及びその測定装置
【課題】コヒーレント光を用いて、被測定球体の球径を高精度で、且つ簡便な方法で短時間に測定できる球体の球径寸法測定方法及びその測定装置を提供する。
【解決手段】被測定球体1にコヒーレント光を照射することによって該被測定球体1の影中の部分に生じる干渉縞と輝点部で構成されるアラゴスポットの前記輝点部を用いて、前記アラゴスポットの輝点部の位置又は該被測定球体1の球径に応じて変位する前記アラゴスポットの輝点部の移動量から、該被測定球体1の球径を測定することを特徴とする。被測定球体1の球径は、幾何的手段、又は電気信号に変換されたアラゴスポットの輝点部の位置又はアラゴスポットの輝点部の移動量を用いてあらかじめ測定して得られたアラゴスポットの輝点部の移動量と球体1の球径との関係式から換算して求められる。
(もっと読む)
映像表示スクリーン、映像表示システム、および撮影装置検出方法
【課題】盗撮防止用の妨害画像としての非可視光を含む映像から該非可視光を除去して盗撮しようとする者を容易に検出する技術を提供する。
【解決手段】映像表示システム1は、映像を表示する映像表示部と、映像と共に、可視光以外の光を観察者に対して照射する非可視光発光部と、観察者が有する撮影装置から反射された非可視光を受けて、フレーム画像データを生成する非可視光受光部と、前記画像データを処理することにより、前記撮影装置の存在を検出する画像処理部143とを備える。画像処理部143は、背景画像を表すリファレンス画像データを参照し、前記フレーム画像データから前記背景画像の成分を除去する背景削除部150と、背景削除部150の処理後のフレーム画像データを、複数フレームにわたって平均化処理を行うことにより、フリッカを除去するフリッカ除去部151とを備える。
(もっと読む)
光検査方法及びその装置
【課題】
光検査装置において、検出する光が微弱な場合に問題となる量子ノイズの影響を抑制する。
【解決手段】
光検査装置を、試料に光を照射する光照射手段と、参照光を発射する参照光手段と、光照射手段により光が照射された試料からの透過光または散乱光または反射光と、参照光手段から発射された参照光とを干渉させて干渉光を生成する光干渉手段と、光干渉手段により生成した干渉光を検出する光検出手段と、光検出手段により干渉光を検出して得られた検出信号に基づいて欠陥の有無を識別する欠陥識別手段と、試料からの透過光または散乱光または反射光の状態または参照光手段から発射された参照光の状態または光干渉手段により生成した干渉光の状態のうち少なくとも一つを変換する光変換手段とを備えて構成した。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
物体検出ユニット
【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
傾き測定方法および傾き測定装置
【課題】微小な円筒形部品においても円筒形部品の傾きを容易かつ正確に測定する。
【解決手段】円形挿入穴101および段付部102を有する円筒形部品100の傾き測定方法において、照明部より撮像部へ拡散光を発し、撮像部のピント位置と円形挿入穴の撮像部側の端部101aとを合わせ、当該端部における円形挿入穴の内外のコントラストが所定値以上となるように円筒形部品と照明部との相対位置を調整して円筒形部品の第一画像を撮像し、ピント位置と段付部の撮像部側の端部102aとを合わせ、当該端部における段付部の内部空間の内外のコントラストが所定値以上となるように相対位置を調整して円筒形部品の第二画像を撮像し、第一画像における円形挿入穴の第一中心座標および第二画像における段付部の内部空間の第二中心座標を算出し、第一中心座標および第二中心座標に基づき円筒形部品の傾きを検出する。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
検査装置の感度設定にかかる処理時間とユーザ負担を低減すると共に、LSIテスタによる電気的特性検査にかかるコストの増加、及び、電気特性検査が困難な領域の発生に対処する。
【解決手段】
パターンが形成された試料に光源から発射された光を照射し、この光が照射された試料からの反射光を検出器で検出して画像を取得し、この取得した画像を処理して該画像の特徴量を抽出し、この抽出した画像の特徴量を予め設定した基準値と比較して試料上の欠陥を検出する欠陥検査方法において、予め設定した基準値をパターンが形成された試料を別の検査装置で検査して得た試料の検査結果を用いて作成するようにした。
(もっと読む)
転がり軸受の表面検査装置
【課題】軌道輪表面の仕上がりの良否を簡易にかつ自動的に判断可能であり、製造コストが安価であると共に検査処理が簡単でありしかも精度の高い検査が可能な転がり軸受の表面検査装置を提供する。
【解決手段】検査表面に対しレーザ光を照射し、表面で反射したレーザ光を受光するレーザ光送受手段と、受光した光強度に対応する電気信号を出力する光電変換手段と、レーザ光照射部を軌道輪の軸と同軸で回転させる周方向走査手段と、レーザ光送受手段を軌道輪の軸に沿って移動する軸方向走査手段と、周方向走査の各位置において、光電変換手段から出力される電気信号出力の、軸方向における最大値を取得する最大値取得手段と、取得した最大値のうち、ハレーション状態に対応する最大値の個数を計数するハレーション個数計数手段と、ハレーション個数計数手段により計数されたハレーション個数に応じ、軌道輪の良否を判断する判断手段とを備える。
(もっと読む)
跳躍動作測定装置及び跳躍動作測定方法
【課題】被験者の跳躍動作をより好適に測定することができる跳躍動作測定装置を提供する。
【解決手段】カメラ20によって撮像された画像データに基づいて、測定部13が、カウンタームーブメントジャンプ動作、スクワットジャンプ動作、ホッピングジャンプ動作、及び立ち上がり動作の中から測定動作選択部12によって選択された測定対象の跳躍動作の測定を行い、情報出力部15が、測定結果に基づいた情報を出力する。また、情報提供部14が、選択された跳躍動作となるように、被験者Aに対して、カメラ20によって撮像された画像データに基づいた情報提供を、モニタ30を通じて行う。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法
【課題】変位量への換算を迅速に処理する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小スポットとして投射する。シリンドリカルレンズユニット21は、曲率半径の異なる2つのシリンドリカルレンズ30,31をもっており、それぞれに被検面23aで反射した反射光束に異なる量の非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部24は、受光面から得られる出力信号に基づいて被検面23aの変位を検出する。選択部33は、被検面23aの検出範囲に応じて、いずれか一方のシリンドリカルレンズ30,31を光路上にセットするように移動機構22を制御する。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
三次元計測装置、三次元計測方法、およびプログラム
【課題】同じ領域を連続して三次元計測する場合に、事前に得た情報を有効に活用することにより、迅速に計測を行う装置を提供する。
【解決手段】測定対象100にパターン光を照射する光照射部101と、測定対象100を撮像する撮像部102と、撮像された画像に基づいて測定対象100の三次元形状を計測する計測部と、を備える三次元計測装置であって、撮像された画像のうち、撮像部102により予め撮像された画像の状態から変化した変化領域を抽出する変化領域抽出部107と、変化領域抽出部107により抽出された変化領域に基づいて、光照射部101により照射されるパターン光の特性を設定する光特性設定部109と、備え、計測部は、光特性設定部により設定された特性のパターン光が照射され、撮像部により撮像された画像の変化領域に対して、測定対象の三次元形状を計測する。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
(もっと読む)
61 - 80 / 724
[ Back to top ]