
Fターム[2F065QQ08]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 閾値の決定、変更 (724)
Fターム[2F065QQ08]に分類される特許
81 - 100 / 724
乗員判別装置、及び、乗員判別方法
【課題】シートに着座した大人と、補助シートを用いて着座した子供を常時正確に判別することのできる乗員判別装置、及び、乗員判別方法を提供する。
【解決手段】乗員を含むシート1B上の対象物の距離画像データを取得する距離画像センサ4を設ける。距離画像センサ4で取得した距離画像データを基に、対象物全体の体積に対する乗員の上肢領域の体積比率を求める上肢比率算出手段30を設ける。上肢比率算出手段30で算出した比率が閾値以上の場合に大人であるものと判別し、算出した比率が閾値よりも小さい場合に補助シートに着座した子供であるものと判別する。
(もっと読む)
検査装置における良品判定基準設定方法及び良品判定基準設定装置

【課題】検査対象物について検査装置を用いて得た検査計量値を基に検査対象物の良否を判定する検査装置において、検査対象物が良品であるか不良品であるかを判定する良品判定基準を設定する良品判定基準設定方法。
【解決手段】複数の良品について検査装置を用いて得た良品計量値の分布と、複数の不良品について検査装置を用いて得た不良品計量値の分布とを求め、前記良品計量値の分布と、前記不良品計量値の分布とを、横軸を検出画素数、縦軸をサンプル数として同一の画面上に表示し、当該同一の画面上において両者を比較して、上限の良品判定基準を、前記良品計量値の分布において上限側における不良品計量値の分布の下限より小さなものに設定し、下限の良品判定基準を、下限側における不良品計量値の分布の上限より大きなものに設定する。
(もっと読む)
形状測定装置
【課題】被測定物体を計測中に、被測定物体が計測可能範囲にあるか否かを容易に確認することができる形状測定装置を提供する。
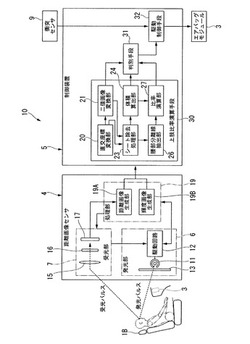
【解決手段】形状測定装置が、被測定物体に計測光を照射する光源41と、光源41からの計測光が被測定物体に照射されたことにより生じる像を検出する光検出部44と、光検出部44からの検出出力に基づいて被測定物体の形状を検出する形状検出部24と、被測定物体の位置が、光検出部44で被測定物体の像が検出できる計測可能範囲から外れているか否かを判定する計測可能範囲判定部31と、計測可能範囲判定部31による判定出力に基づいて、計測光の波長とは異なる波長の指示光を照射する指示光発光部とを備える。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
基板検査方法
【課題】複数の投影部を通して測定対象物が形成された基板を検査する基板検査方法を提供する。
【解決手段】複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得する(S110)。以後、投影部別位相データを用いて基板に対する投影部別高さデータを抽出する(S120)。その後、各投影部別で投影部別高さデータを用いて抽出された高さデータの傾きを補正する(S130)。その後、傾き補正が完了した投影部別高さデータを整列させ(S140)、整列された高さデータを用いて統合高さデータを抽出する(S150)。このように、複数の投影部から抽出された高さデータを整列させる前に各投影部別に測定された高さデータに対する傾きを補正することによって、統合高さデータの信頼性を向上させることができる。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
放射線画像撮影装置
【課題】筐体の被照射面に付着した塵埃等の影響を排除して被照射面に付いた傷を正確に検出することを、装置構成の複雑化を招くことなく実現する。
【解決手段】傷検出用の放射線画像を撮影して白色線欠陥及び黒色線欠陥を検出し、X方向又はY方向に平行で太さが細く読出方向上流側又はドライバと反対側に白色線欠陥が位置している線欠陥は断線由来と判定し(「白色線欠陥A」参照)、再撮影した傷検出用放射線画像((B)参照)で位置が移動している線欠陥は浮遊ゴミ由来と判定し(「白色線欠陥B」「黒色線欠陥A」参照)、位置変化の無い白色線欠陥は筐体の被照射面に固着しているゴミに由来する線欠陥(「白色線欠陥C」参照)、位置変化の無い黒色線欠陥は筐体の被照射面に付いた傷に由来する線欠陥(「黒色線欠陥B」参照)と判定する。
(もっと読む)
表面欠陥検査装置
【課題】金属帯の幅方向に配列された複数台の撮像装置に故障などの異常が生じたことを正確に検出して表面欠陥の見逃し等を防止することのできる表面欠陥検査装置を提供する。
【解決手段】表面欠陥検査装置2は、撮像装置3〜6と、その撮像領域に照明光を照射する照明装置7と、撮像装置により撮像された画像を記憶する画像メモリ9と、画像メモリに記憶された画像を画像処理して金属帯1の表面欠陥を検出する欠陥検出装置10とを備え、さらに、画像メモリに記憶された画像から金属帯のエッジを検出するエッジ検出部16と、検出されたエッジから金属帯の板幅を算出する板幅算出部17と、撮像装置から出力された画像信号の平均輝度レベルを算出する平均輝度算出部18と、算出された板幅を金属帯の真の板幅情報と比較すると共に算出された平均輝度レベルを閾値レベルと比較して撮像装置3〜6の異常を判断する異常判断部19とを有してなる異常検出装置15を備えている。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とすることを課題とする。
【解決手段】被判別対象の撮影工程と、被判別対象の二値化画像を作成する二値化工程と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程と、前記二値化画像の容器の口部分を含む画像部分を、容器を輪切りするように帯状に複数の区域に区分けする区域分け工程と、前記区域毎に容器に該当する領域の横幅をそれぞれ計測する横幅計測工程と、前記区域毎に、各区域において同一の方向に隣接する区域との前記横幅の差又は比率を求め、求めた値を判別値とする判別値演算工程と、前記判別値と事前に設定した閾値とを比較する形状判断工程とからなり、該形状判断工程での比較の結果に基づいて前記容器がペットボトルであるか否かを判別する、という技術的手段を講じた。
(もっと読む)
有水式ガスホルダの傾斜測定方法及び装置
【課題】多段のガス槽の傾斜状態をリアルタイムで計測することができ、各ガス槽の支持部材の更新時期を的確に判断することできる有水式ガスホルダの傾斜測定装置を提供する。
【解決手段】水槽2内の水面から上昇しているガス槽を特定するガス槽特定手段27と、特定したガス槽に配置されている反射板21a〜23aに光軸が一致するように第1〜第3光波距離計25a〜25cを移動させる第1〜第3駆動部26a〜26cと、第1〜第3光波距離計が測定した反射板との距離に基づいて、特定したガス槽の傾斜情報を算出する算出手段28と、その傾斜情報を表示する表示手段29とを備えている。
(もっと読む)
3次元複合機および3次元複製方法
【課題】立体物の複製を家庭やオフィス等で手軽に実現しする3次元複合機を提供する。
【解決手段】処理用空間としてのチャンバーと、3次元モデルデータに基づいて上記チャンバー内に立体物を造形可能な造形部30と、上記チャンバー内に載置された測定対象物を3次元測定して3次元モデルデータを取得可能な測定部20と、上記測定部20により取得された3次元モデルデータに基づいて上記造形部30に上記測定対象物の複製物を造形させる造形制御部とを備える3次元複合機10とした。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
回折光学素子及び計測装置
【課題】均一で安定性の高い光スポットを発生させる回折光学素子を提供する。
【解決手段】複数の基本ユニットが2次元的に配列されている第1の回折素子と、複数の基本ユニットが2次元的に配列されている第2の回折素子と、を有し、入射する光に対して2次元的な回折光を発生させる回折光学素子であって、前記第1の回折素子において前記基本ユニットの配列方向を第1の方向とし、前記第2の回折素子において前記基本ユニットの配列方向を第2の方向とし、前記光が前記第1の回折素子、前記第2の回折素子の順に入射するとき、前記第1の回折素子で発生する回折光がさらに、前記第2の回折素子に入射して発生する0次光の最近接距離をΔxとし、前記第2の回折素子により発生する回折光及び迷光における最近接距離をαとした場合、前記第1の方向と前記第2の方向のなす角φが、−|φ1|<φ<|φ1|、かつ、φ≠0、sinφ1=−α/Δxであることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
印刷はんだ検査装置および印刷はんだ検査方法
【課題】プリント板上の測定しようとするはんだ箇所に対し、高さの基準となる基準面を設定し、その基準面に対するはんだの高さを求めるときに、部品実装後のプリント板を分割するために加工された分割用加工部の影響を受けないようにする技術を提供する。
【解決手段】変位センサがはんだが印刷されたプリント板を光学的に計測し、このプリント板の高さの変位を示す変位情報を出力し、分割ライン決定部がプリント板を分割するための分割用加工部を変位情報に基づき検出し、プリント板の分割ラインを分割ライン情報として出力する。基準面算出領域設定手段は、分割ライン情報を受け分割ラインの内側の領域内に基準面算出領域を設定し、基準面算出手段が基準面算出領域内の変位情報に基づいて、基準面算出領域に形成される平面を基準面として設定する。変位測定部は、はんだ箇所のはんだの高さを、はんだ箇所の変位情報と設定された基準面とから算出する。
(もっと読む)
パターンの形成された基板の粗さを得る方法、パターンの形成された基板の粗さを得るための装置
【課題】パターン付きウェハの表面粗さを高精度で非破壊に測定できる平坦な検査範囲を、目視によらず探索できる表面検査装置を提供する。
【解決手段】照射される照射光により生じる散乱光の散乱光強度を、パターン付きウェハ200上の測定座標に対応付けて測定し、ウェハ200の表面粗さを検査する表面検査装置において、制御部が、下限閾値以上である散乱光強度の測定座標を抽出し、抽出された測定座標の周辺に相当するパターンの全体レイアウト401の一部の部分レイアウト405a内に、表面粗さの検査の検査範囲406を設定し、検査範囲406における表面粗さを求める。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
携帯通信端末、それを用いた計測プログラムおよびそれを用いた計測方法
【課題】ヘッド速度と飛距離とを計測することができる携帯通信端末を提供する。
【解決手段】携帯電話機10はプロセッサを含み、プロセッサは計測処理を開始すると、連続撮影処理を実行する。したがって、1フレーム毎の画像データが取得される。隣接するフレーム間の撮影画像におけるボール画像の動きが判断され、一定以上の動きが有ると、ゴルフボール52が打撃されたと判断される。そして、打撃される直前およびその1つ手前のフレームの撮影画像から、1フレーム間におけるヘッド画像の移動距離が算出され、これに基づいてヘッド速度が算出される。また、ゴルフボール52の打撃位置と到達位置とがGPS衛星からのGPS信号を受信することにより取得され、これらに基づいて飛距離が算出される。
(もっと読む)
表面評価装置
【課題】ワーク表面の凹凸状態をパワースペクトルの全座標点データを用いて定量的に評価することができる表面評価装置を提供する。
【解決手段】ワーク表面の凹凸データに基づいてワーク表面を評価する表面評価装置10において、前記ワーク表面の凹凸データをフーリエ変換してパワースペクトルを求める手段と、当該パワースペクトルを相互相関関数を用いて数値化する手段と、当該数値化された値の最大値を用いて前記ワーク表面の評価を行う手段と、を有する。
(もっと読む)
表面評価装置
【課題】ワーク表面等の微小凹凸の密集度合を定量的に評価することができる表面評価装置を提供する。
【解決手段】シリンダボア2表面の凹凸データに基づいてシリンダボア2表面を評価する表面評価装置20において、前記シリンダボア2表面の凹凸データをフーリエ変換して周波数スペクトルを求める手段と、前記周波数スペクトルから所定のしきい値に基づいて周波数成分を抽出する手段と、前記抽出された周波数成分を逆フーリエ変換して凹凸データに復元する手段と、前記復元された凹凸データから所定のしきい値に基づいて凹凸座標データを抽出する手段と、前記凹凸座標データより座標の数と座標値の分散を求める手段と、前記座標値の分散よりシリンダボア2表面品質を評価する手段と、を有する。
(もっと読む)
81 - 100 / 724
[ Back to top ]