
Fターム[2F069CC07]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の形状 (493) | 板状;薄膜状 (182) | 円盤 (33)
Fターム[2F069CC07]に分類される特許
1 - 20 / 33
基板の凹部の検査方法および基板のレジスト膜の検査方法
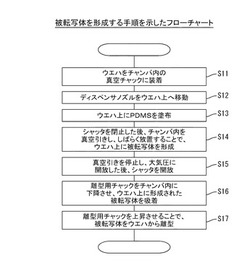
【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
位置決め装置

【課題】バックラッシに起因する位置決め精度の低下を抑えることのできる位置決め装置を提供する。
【解決手段】位置決め装置のコントローラは、正方向用の補正マップと逆方向用の補正マップ、及び、移動台を移動させる際の基準位置を記憶している。コントローラは、以下の処理、即ち、(1)移動台が基準位置から既定の閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する更新処理、(2)基準位置と目標位置との間の距離が閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が閾値未満であり、かつ、最新の基準位置が設定されてから1回は移動方向が反転している場合には、両方向の補正マップを用いてセンサによる位置計測値を補正する補正処理、(3)補正後の位置計測値を目標位置に一致させる制御処理と、を実行する。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
レンズ中心厚測定器およびレンズ中心厚測定方法
【課題】形状や厚みが異なる種々の被検レンズのレンズ中心厚を、被検レンズの外観品質を低下させることなく正確に測定することが容易なレンズ中心厚測定器を提供すること。
【解決手段】測距用のセンサヘッド22a,22bを有する2台の非接触型測長計2a,2bと、これら2台の非接触型測長計それぞれのセンサヘッドを互いに対向させ、各センサヘッドの測定軸MA1,MA2を互いに一致させて支持する測長計支持部3Aと、センサヘッド間に設けられ、被検レンズL1の少なくとも光学中心Lc,Ldを露出させて且つ該被検レンズの光軸Lxを測定軸に一致させて該被検レンズを保持するレンズ保持部4Aとを用いてレンズ中心厚測定器1Aを構成する。
(もっと読む)
一体化したターニング・センタを有する非接触検査システム
【課題】ロータの機械加工と非接触検査システムを一体化する。
【解決手段】非接触検査システム110は、制動表面を指す非接触センサ(112−1、112−2)の1つ以上の対及びディスクの外径を指す非接触センサを有する。非接触センサは、誘導性センサ、容量性プローブ及び/又はレーザ・センサである。システムは、制動表面102、104厚さ変動、横振れ、平坦さ、平行性及び直径等の種々の特徴及び特性を測定する。ディスクが指定速度で回転する間に又はディスクが停止している間に測定を行う。非接触センサ(112−1、112−2)の対は、センサ又は校正された表面から、その指した表面までの距離を連続的に測定する。他の2つのセンサ(115及び/又は117)は、センサ又は校正された表面から、その指した面までの距離を連続的に測定する。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
基板処理装置及び基板搬送方法
【課題】スループットの低下を低減する基板処理装置及び基板搬送方法を提供すること。
【解決手段】基板処理装置は、計測ユニット10と、搬送機構とを備える。計測ユニット10は、基板Wの状態を所定の計測位置Pmで計測する計測器15と、第1のトレイ11と、第2のトレイ12と、所定の計測位置Pmと第1のトレイ11及び第2のトレイ12との間で基板Wを移動させるステージ16とを有する。搬送機構には、基板Wを把持する第1の把持部21及び第2の把持部22を有するロボットハンド25が設けられている。第1のトレイ11に基板Wを載置したロボットハンド25が計測ユニット10から出ずに計測後の基板Wを計測ユニット10の外に取り出すことで、計測ユニット10に対する1回のアクセスで計測前後の基板Wを入れ替えることができてスループットの低下を低減することができる。
(もっと読む)
表面形状測定装置及び露光装置
【課題】単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供する。
【解決手段】表面形状測定装置は、光源からの白色光をモスアイ形状の反射防止部を有するプリズムを用いて基板と参照面に80度以上の入射角で入射させ、白色干渉光を得る。波長選択が可能な光学フィルターを用いて白色干渉光を複数の単一光による干渉光に分解する。その複数の干渉光に対して高速フーリエ変換を行いパワースペクトル分布を求め、スペクトルのピーク位置情報を用いて基板の表面形状を測定する。
(もっと読む)
ウェーハ平坦度計測方法、ウェーハ平坦度計測装置および計測データ処理装置
【課題】CMP工程の状態を管理する上で、より有用で、より精度の高いウェーハの平坦度を取得する方法の提供。
【解決手段】計測データ処理装置10は、集積回路のマスク形状データに基づきCMP工程で生じる可能性のある窪み部の位置を予測し(窪みデータ生成部102)、その窪み部の上層で生じる可能性のある欠陥の位置を予測し(欠陥候補位置抽出部102)、欠陥のあることが予測される窪み部の中から、AFM20が表面形状データを取得すべき計測位置を決定し(計測位置決定部103)、その計測位置データを付して、AFM20に表面形状データの取得を指示する(表面形状データ取得部104)。また、計測データ処理装置10は、AFM20により計測された表面形状データを、AFM20から取得し(表面形状データ取得部104)、表示装置40に表示する(表示部105)。
(もっと読む)
部材所定位置の検出装置
【課題】被検出パターン配置が可能で、かつ、センサ配置領域を小さくする。
【解決手段】距離D以上の隣接センサ間ピッチで1次元配置されたn個(n≧2)のセンサと、m個(2≦m≦n)の被検出部位(スリット12a)が、互いにユニークな配置パターンにてk箇所(k≦nCm)それぞれに形成されている被検出部材(立設部12)と、を有する。そして、スリット12aの全てがm個にセンサに作用するときに、m個のセンサで隣接センサ間ピッチをセンサ配列順に並べた組み合わせにおいて、少なくとも1つの隣接センサ間ピッチが、k箇所から任意に選んだ2箇所で前記距離D以上異なるように、センサ配置パターンとスリット配置パターンとが決められている。
(もっと読む)
多点プローブの零点誤差関連値記録装置
【課題】多点プローブにおいて、複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差関連値記録装置を提供する。
【解決手段】
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
(もっと読む)
多点プローブの零点誤差の変動検出方法
【課題】複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差の変動検出方法を提供する。
【解決手段】
多点プローブの零点誤差の変動検出方法は、センサユニット220をスピンドルにて回転されている状態の試料の測定面に相対するように配置して、試料が1回転する間において、試料が所定回転角度回転する毎に複数の変位センサA,B,Cから出力される試料の測定面における同心円に沿う形状値及び零点誤差を含む測定値をCPU310に読取りさせて記憶装置340に記憶させる。記憶装置340が記憶した、同一の試料に関する新しい測定値と古い測定値とに基づいて、零点誤差の変動量を算出する。
(もっと読む)
測定装置、測定基準及び精密工作機械
【課題】本発明は平面形状の高精度測定を変位計の走査によって実現することを課題とする。
【解決手段】面上の半径rの円に沿う凹凸を変位計Dbの回転走査で測定するときに,回転中の軸方向の出入りを検出する変位計Daと,変位計Da,変位計Dbの測定点を結ぶ直径上の,半径Rの円に沿う走査測定をする変位計Dc,変位計Dd,合計4本を用意して,半径Rの円が描かれる面が回転走査軸と同心で,前記半径rの円に対して相対的に180度回転した位置にも反転設置できる基準円輪SC上にある形にし,基準円輪SCの反転操作の前後の回転走査における4本の変位計の出力から,合計6つを選んで用いることで,走査のための回転運動誤差と半径rの円と半径Rの円に沿う凹凸形状を分離同定する。この結果得られた円に沿う凹凸形状と,別の方法を用いて複数の直径上で得られた直線に沿う凹凸形状とを数学的に合成すると平面を正しく構成することが可能となる。
(もっと読む)
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
回転体測定方法
【課題】高次の次数kを考えた場合でも、正しく計算できない次数kが出てくるということがなく、回転体の形状r(θ)、ひいては回転振れ量x(θ)、y(θ)を正しく求めることができる回転体測定装置20および方法を提供する。
【解決手段】4本以上の検出器を用いて、(22)式および(23)式の分母にくる倍率係数α1k、β1k等が均一になる検出器の角度配置を複数組選択する。(22)式および(23)式の分母が0となる部分は複数組の間で補完しあうように倍率H1k、H2k(結果的に倍率係数α1k、β1k等)を選択する。この補完しあう倍率係数α1k、β1k等(結果的にAak、Bak)を用いて形状r(θ)と回転振れ量x(θ)、y(θ)を求める。
(もっと読む)
形状測定装置、形状測定方法
【課題】様々な厚みの測定試料の表面形状を測定する場合でも、事前の校正作業工数の増大を伴うことなく、高い測定精度を確保して測定できること。
【解決手段】変位計2で測定位置を2次元方向に走査させつつ得られる計測値から測定ウェハ4の表面形状を測定する場合に、測定ウェハ4と厚みが異なるが材料及び平面視した形状が同じ基準ウェハの厚み、及びそれが支持部1で支持された場合の自重による撓み量、並びに走査手段3の走査ぶれ量を予め記憶し、対向配置した変位計2a,2bによる測定ウェハ4の厚み計測、変位計2による測定ウェハ4の表面変位計測を行い、計算機7により、予め記憶された基準ウェハの厚み及び自重撓み量と測定ウェハの厚み計測値とにより、測定ウェハ4の自重撓み量を算出し、走査ぶれ量と測定ウェハ4の自重撓み量及び表面変位計測値とにより測定ウェハ4の表面形状値を算出する。
(もっと読む)
形状測定装置固有の系統誤差を測定する方法と縦型形状測定装置。
【課題】
シリコンウェーハやFPD用ガラス基板等のパネルの形状の大面積・薄肉化に伴い、自重によるパネルの変形の影響を受け、正確なパネルの形状の測定が困難になってきているが、縦型形状測定装置を使用し、正確なパネルの形状を測定する方法を提供する。
【解決方法】
縦型形状測定装置を使用し、大面積・薄肉パネル形状を測定する場合の、その測定に影響を与える誤差要因を分析し、縦型形状測定装置固有の系統誤差を抽出した。その抽出した系統誤差値を補正値として形状を測定すれば、パネルの正確な形状測定が可能となる。
(もっと読む)
リソグラフィ装置又はその一部を較正又は検定する方法及びデバイス製造方法
【課題】リソグラフィ装置又はその一部を較正又は検定する方法及びデバイス製造方法を提供すること。
【解決手段】リソグラフィ装置又はその一部を検定又は較正する方法において、チョーベネットの判定基準などの所定の客観的判定基準を使用して、視野毎に、又は基板毎に個々に測定ポイントが除外される。
(もっと読む)
光記録媒体における記録マーク測定方法及び装置
【課題】光記録媒体でのV溝形状のグルーブと、ここに形成された記録マークとの位置関係及び記録マークの形状を精密に測定する。
【解決手段】V溝形状のグルーブを有する光記録媒体に記録マークを形成しておき、これを、記録マーク測定装置50における走査型プローブ顕微鏡52をAFMモードとしてプローブにより走査し、得られた凹凸像の信号から、V溝の底部のみを残すデータ処理を施して、グルーブ底部強調凹凸像を得て、このグルーブ底部強調凹凸像と検出電流により得られたコンダクティブAFM像とを合成して、グルーブ底部と記録マークとの位置関係を測定する。
(もっと読む)
プログラム、情報記憶媒体、車輪摩耗推定装置及びフランジ角度推定装置
【課題】 鉄道用車輪の摩耗した踏面形状を定量的に推定可能とするとともに、この推定を用いて、車輪の転削時期や寿命(交換時期)を定量的に推定可能とすること。
【解決手段】 計測時の走行距離が異なる複数の鉄道用車輪の踏面形状データそれぞれを、車輪の厚さ方向であるX方向のデータ間隔が0.1[mm]の等間隔のデジタルデータに変換する。そして、変換後の踏面形状データそれぞれに対して回帰演算を行うことで、推定走行距離での踏面形状データを推定(算出)する。
(もっと読む)
1 - 20 / 33
[ Back to top ]