
Fターム[2F069GG15]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 間接測定 (218)
Fターム[2F069GG15]の下位に属するFターム
温度 (21)
応力 (22)
荷重 (30)
振動 (17)
その他の特定された変量 (99)
Fターム[2F069GG15]に分類される特許
1 - 20 / 29
車両の路面傾斜角算出装置
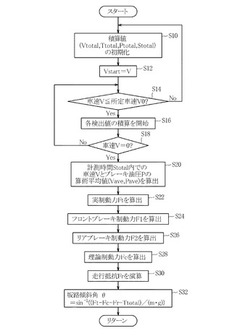
【課題】本発明は、バラツキを抑え、精度良く路面の傾斜角を算出することのできる車両の路面傾斜角算出装置を提供することにある。
【解決手段】車速センサで検出される現在の車速Vが所定車速V0以下であれば(S14)、車速V、ブレーキ圧センサで検出されるブレーキ油圧P、走行負荷トルク検出部で検出される走行負荷トルクT及びタイマで計測される時間Sを積算し、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalを算出し(S16)、車速センサで検出される現在の車速Vが0km/hで車両が停止したところで(S18)、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalより坂路傾斜角θを算出する(S20-S32)。
(もっと読む)
電子装置、電子装置の製造方法および機能素子の寸法の測定方法

【課題】備える機能素子を直接測定することなく、機能素子の寸法を精度よく測定することにより、機能素子の状態が把握されることができる電子装置を提供すること。
【解決手段】電子装置1は、基板2と、基板2上に配置され、固定電極31および固定電極31と空隙を隔てて対向配置された可動板322を備える可動電極32を有する機能素子3と、基板2上に設けられ、機能素子3が配置された空洞部6を画成する素子周囲構造体5と、基板2上の空洞部6の外部に設けられ、固定電極31に対応する第1の検査用膜41と、可動電極32に対応する第2の検査用膜42とを有する検査体4とを有し、検査体4は、所定の部位の寸法が測定されることにより、機能素子3の所定の部位の寸法を求めるために用いられることを特徴とする。
(もっと読む)
プログラム、情報記憶媒体及びフランジ角度推定装置
【課題】鉄道用車輪の摩耗によるフランジ角度の変化を、走行距離との関係で定量的に推定可能とすること。
【解決手段】鉄道用車輪の設計時のフランジ角度を設定し、(1)設定されたフランジ角度をDとし、走行距離をX、フランジ角度をYとした場合の式「Y=A×tanh(B×X)+C×X+D」から求まるXとYとの関係、(2)推定対象としている鉄道用車輪の計測履歴データにおけるフランジ角度の計測値と当該計測時の走行距離との関係、が所定の近似条件を満たす場合の定数A,B,Cを算出する。
(もっと読む)
金属リングの周長測定方法
【課題】金属リングの周長を精度よく測定することができる金属リングの周長測定方法を提供する。
【解決手段】金属リングWを1対のローラ2,3に掛け回し、一方のローラ3を他方のローラ2から離間する方向へ移動することにより金属リングWに張力を付与すると共に両ローラ2,3間の距離を測定し、両ローラ2,3間の距離から金属リングWの周長を算出する金属リングWの周長測定方法において、金属リングWの1つの部位P1が両ローラ2,3間の所定の位置Mにあるときに金属リングWの周長を算出した後、金属リングWの他の部位P2が所定の位置Mにあるときに金属リングWの周長を算出する処理を少なくとも1回行い、算出された全ての金属リングWの周長の平均値を金属リングWの周長とする。金属リングWの周長を算出する処理を少なくとも3回以上行うことが好ましい。
(もっと読む)
作業車両
【課題】従来、この種のホイールバランスの検査を行う装置は、車両とは別に独立した装置から構成され、検査をする車輪は、車両に装着する前か、又は車両から取り外して検査しなければならない課題があった。
【解決手段】この発明は、上記課題を解決するために、車体1に装備した傾斜センサ2の検出情報に基づいて、該車体1もしくは該車体1に対してローリング自在に連結する作業機を自動的に水平制御する制御装置3を備えた作業車両において、前記傾斜センサ2は、車体1に軸装している車輪4のホイールバランスをチエックするモードを選択すると、前記検出情報を車輪4の偏芯等を判定するチエック情報として利用できる構成とした作業車両の構成とする。
(もっと読む)
湿潤膜厚測定方法および装置
【課題】 塗工装置上において乾燥環境等による外乱を受けずに塗工膜の湿潤膜厚を測定する。
【解決手段】
基材の張力を測定する張力測定過程と、基材の厚さを測定する厚さ測定過程と、塗工後の基材を所定幅で切断し測定用サンプルを得る切断過程と、測定用サンプルを巻き取る巻取過程と、測定用サンプルの全長を測定する全長測定過程と、巻取体における測定用サンプルの基材部分と塗工部分から成る全質量を測定する全質量測定過程と、張力と測定厚さから基材の真の厚さを演算する真厚さ演算過程と、巻取体における測定用サンプルの湿潤膜厚を(湿潤膜厚)=((全質量)−(基材密度)×(真厚さ)×(所定幅)×(全長))/((塗工液密度)×(所定幅)×(全長))から演算する湿潤膜厚演算過程とを有するように湿潤膜厚測定方法およびその方法を適用した装置。
(もっと読む)
湿潤膜厚制御方法および装置
【課題】塗工装置上において乾燥環境等による外乱を受けずに塗工膜の湿潤膜厚を測定し、その湿潤膜厚が適正範囲となるように制御する湿潤膜厚制御方法と装置を提供する。
【解決手段】
基材の張力測定過程と、基材の厚さ測定過程と、全面塗工済の所定幅の測定用サンプルを得る切断過程と、測定用サンプルの巻取過程と、測定用サンプルの全長測定過程と、測定用サンプルの全質量測定過程と、張力と測定厚さから基材の真の厚さを演算する真厚さ演算過程と、巻取体における測定用サンプルの湿潤膜厚を演算する湿潤膜厚演算過程と、演算した湿潤膜厚が適合膜厚の範囲内であるか範囲外であるかを判定する膜厚適合判定過程と、判定が範囲外であるときには塗工部の塗工条件を操作する操作過程とを有するようにした湿潤膜厚制御方法およびその方法を適用した装置。
(もっと読む)
金属ストリップのストリップ張力を測定するための装置
本発明は、1つの平坦なテーブル(2)を備え、このテーブルを介して金属ストリップが走行可能であり、テーブルの一端(3)に、ストリップ張力の測定に適した多数の測定要素(4)が配設されており、冷却要素(5)が設けられており、これら冷却要素がテーブル(2)の下に配設され、その冷却液、特に水、を、測定要素(4)の領域に誘導可能である、金属ストリップ、特にスチールストリップ、のストリップ張力を測定するための装置(1)に関する。テーブルを簡単な方法で撓まないように保護するために、本発明によれば、冷却要素(5)が、ボックス状の冷却液容器(6)を備え、この冷却液容器が、金属ストリップの両側で、少なくとも1つのサポート要素(7)上に配設されており、テーブル(2)の下面が、ボックス状の冷却液容器(6)に間接的又は直接的に当接する。 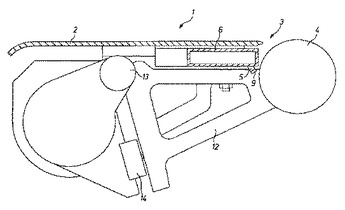 (もっと読む)
(もっと読む)
信号処理装置
【課題】車両が安定走行状態にある時、車高センサやロール角速度センサ等の車両の姿勢状態を検出するセンサの出力信号から、路面の凹凸等の影響による信号雑音を十分に除去することが可能な信号処理装置を提供する。
【解決手段】操舵角・操舵角速度測定部21が、車両1の操舵角X(t)を測定し、操舵角X(t)から操舵角速度Y(t)を算出する。そして、走行状態判定部22が、操舵角X(t)及び操舵角速度Y(t)に基づき車両1の走行状態STSを判定する。この結果、車両1が安定して走行していると判定された時、カットオフ周波数設定部23が、カットオフ周波数Fを信号雑音除去用の低周波数FLに設定し、車両1が安定して走行していないと判定された時、カットオフ周波数Fを位相遅れ防止用の高周波数FHに設定する。そして、ローパスフィルタ24が、車高センサ10L及び10Rの車高変位信号HL(t)及びHR(t)中のカットオフ周波数F以下の周波数成分(HLf(t)及びHRf(f))だけをそれぞれ通過させる。
(もっと読む)
路面状態判定装置及び路面状態判定方法
【課題】従前の路面状態判定基準が適用できなくなった場合でも,誤判定を回避するような路面状態判定装置を提供する。
【解決手段】路面状態判定装置において,走行音を取得する走行音取得部と,走行音ごとに路面状態を対応付けた路面状態判定基準を格納した記憶部と,地図情報に路面の舗装種別を対応付けて記憶した自車位置検出部から走行路面の舗装種別を検出する舗装種別検出部と,検出した舗装種別に応じた路面状態判定基準を用いて取得した走行音に対応する路面状態を判定する路面状態判定部と,走行路面の路面状態を外部の情報源から取得する路面状態取得部とを有する。そして,判定した路面状態と取得された路面状態が異なる場合は,走行路面の舗装種別が路面状態判定基準において当該走行音と取得された路面状態により特定される舗装種別となるように,舗装種別検出部の記憶内容を変更する。
(もっと読む)
駆動軸損傷診断装置
【課題】 圧延設備等の駆動軸の損傷を診断するに際して、変位センサから出力された生波形から駆動軸のクロスの剥離および摩耗の両方ともの判別を可能とした駆動軸損傷診断装置を提供する。
【解決手段】 変位センサの出力から駆動軸の損傷状態を検出する処理手段は、変位センサの出力波形に対して移動平均によるスムージングを行うスムージング手段と、スムージングされた変位センサの出力波形をFFT変換するFFT変換手段と、FFT変換で得られたスペクトルから回転同期成分を除去して逆FFTにより時間軸波形に変換する逆FFT変換手段と、逆FFT変換で得られた波形の平均値から摩耗状態を判定する摩耗判定手段と、逆FFT変換で得られた波形の振幅から剥離状態を判定する剥離判定手段とを含んでいる。
(もっと読む)
スポット溶接ロボットの電極チップ整形監視方法及び同監視装置
【課題】 電極チップ整形監視装置を簡素化でき、ロボットのティーチングが不要で、且つサイクルタイムに影響を与えないようにする。
【解決手段】 スポット溶接ロボットに設けた各軸回りに電極チップを回動させるためのサーボモータ24における回転軸の回転位置、回転軸の回転速度及びモータ電流をそれぞれフィードバック制御するサーボモータ制御部70Aのフィードバック量(即ち、検出電流If、位置情報Pf、速度情報Vfのうちの少なくとも一つ)と、このフィードバック量に対応させて予め設定した設定値幅とを比較することにより、電極チップの整形状態及びチップドレッサの作動状態を監視する。
(もっと読む)
3次元測定における穴位置測定方法
【目的】非接触式3次元測定において、定点を複数に変えて測定しなければならないため多くの手間がかかっていた穴位置の測定を一つの定点から測定できるようにする。
【構成】基準面1に設けられている穴2へ基準治具4の固定部11を予め嵌合する。基準治具4の上部には半球状の球面部3が設けられ、この球面部3の表面を定点Pより3次元測定器5で3次元測定する。この測定により得られた部分球面データ6に基づいて全球7を計算し、さらにこれを基準面1と同じ傾斜の投影平面8上へ投影円9を投影してその中心を二次中心O2とし、これにより穴位置を決定する。
(もっと読む)
原子間力顕微鏡及び原子間力顕微鏡を用いたエネルギー散逸像の形成方法
【課題】 正確なエネルギー散逸像を得ることのできる原子間力顕微鏡及び原子間力顕微鏡を用いたエネルギー散逸像の形成方法を提供すること。
【解決手段】 原子間力顕微鏡は、試料21と接触するための探針20を有するカンチレバー1と、カンチレバー1に振動を加えるための加振手段と、設定された振幅設定値に基づいて加振手段を制御するための加振制御手段と、カンチレバー1の振動の振幅を検出する振幅検出手段17と、カンチレバー1の振動に基づくエネルギーの散逸像を形成する像作成手段19とを具備し、当該振幅設定値と振幅検出手段により検出された振幅検出値との差異に基づく差異情報を加振手段にフィードバックすることにより、カンチレバー1が共振状態となるように加振手段がカンチレバー1を振動させるとともに、当該差異情報に基づいて像作成手段19がエネルギーの散逸像を形成する。
(もっと読む)
転がり軸受のフレッチング摩耗の損傷度の評価方法とアンデロン値の推測方法と転がり軸受及びグリースの耐フレッチング性の推測方法
【課題】 内輪軌道2にフレッチングにより生じた損傷部の損傷度の的確な指標化を可能とし、小径の玉軸受でも上記損傷度を容易且つ精度良く評価可能とする。
【解決手段】 上記損傷部のうち、0.05μm以上の高さの凸部が形成された凹凸損傷部をその内側に含む、上記損傷部が生じた面に対し直交する方向から見た場合での、内輪3の軸方向及び円周方向をその四辺の方向とする矩形枠のうち、最小の矩形枠8の内側の面積Aと、この矩形枠8内での凸部の最大高さBとを測定する。そして、フレッチング摩耗の損傷度を、(A×B)1/3 として求める。
(もっと読む)
操舵角検出装置
【課題】 後進時にも正確な操舵角を検出できる操舵角センサを提供すること。
【解決手段】 車両のヨーレイトを検出するヨーレイト検出手段と、操舵可動領域を複数の領域に分割し、それぞれの領域内で操舵角に応じた第1の値を出力する複数のセグメントと、ヨーレイト検出手段により検出されたヨーレイトと、セグメントの出力する第1の値との関係に基づいて、操舵角の存在するセグメントを特定するセグメント特定手段と、セグメントから出力された第1の値と、前記セグメント特定手段により特定されたセグメントから操舵角を検出する操舵角演算部と、を備えた操舵角検出装置であって、セグメント特定手段は、右転舵時におけるヨーレイトと第1の値との関係からセグメントを特定する右転舵エリアと、左転舵時におけるヨーレイトと第1の値の関係からセグメントを特定する左転舵エリアとを有し、車両の前後進時にセグメントを特定する手段とした。
(もっと読む)
プログラム、情報記憶媒体、車輪摩耗推定装置及びフランジ角度推定装置
【課題】 鉄道用車輪の摩耗した踏面形状を定量的に推定可能とするとともに、この推定を用いて、車輪の転削時期や寿命(交換時期)を定量的に推定可能とすること。
【解決手段】 計測時の走行距離が異なる複数の鉄道用車輪の踏面形状データそれぞれを、車輪の厚さ方向であるX方向のデータ間隔が0.1[mm]の等間隔のデジタルデータに変換する。そして、変換後の踏面形状データそれぞれに対して回帰演算を行うことで、推定走行距離での踏面形状データを推定(算出)する。
(もっと読む)
ゴムホースのワイヤの巻付けピッチの検査方法および検査装置
【課題】ゴムホースの成形において構成部材としてスパイラル状に巻付けられるワイヤの巻付けピッチを容易に精度よく検査でき、検査作業の軽減および品質の向上を図ることが可能なゴムホースのワイヤの巻付けピッチの検査方法および検査装置を提供する。
【解決手段】ワイヤ10がスパイラル状に巻付けられる位置C1と、このワイヤ10の外側に層間ゴム13が巻付けられる位置C2との間に配置したセンサ2で、移動するスパイラル状に巻付けられたワイヤ10を検知して検知信号を発信し、検知信号とマンドレル14の移動速度とに基づいてデータ処理装置7がワイヤ10の巻付けピッチを算出するとともに、算出したピッチと、予めデータ処理装置7に登録されている所定ピッチとの比較結果がモニター8に表示される。
(もっと読む)
ガイドレールの据付精度測定装置及び測定方法
【課題】ガイドレールの据付精度を簡単且つ短時間に計測することにある。
【解決手段】昇降路内を昇降する昇降体を案内するガイドレール31の据付精度を測定する装置において、昇降体とガイドレール31との相対距離を検出する変位検出センサ34と、前記昇降体に取付けられ該昇降体の絶対変位を検出する振動系35及びこの振動系に取付けられた変位検出センサ36と、前記変位検出センサ34及び変位検出センサ36により検出された相対距離データ及び絶対変位検出データをもとにガイドレールの据付精度を演算する。
(もっと読む)
タイヤユニフォミティ修正方法
【課題】 効率的なタイヤユニフォミティ修正方法を提供する。
【解決手段】 目標速度のRRO成長量の実測値又は推定値と、伝達率と、を用い、目標速度の高速RFV推定値を算出する。更に、この伝達率を用い、次数毎に、高速RFVの推定値及び上限値から、高速RFV推定値に相当する低速RFV相当値、及び、高速RFV管理上限値に相当する低速RFV管理上限相当値を求める。そして、次数毎に、低速RFVの相当値及び管理上限相当値を比較して、相当値のうち管理上限相当値を超えている低速RFV超過分相当値を求める。更に、低速RFV超過分相当値からタイヤ一周分の低速RFV超過分推定波形を求め、該推定波形に基づいて低速RFV必要修正量を示す低速RFV必要修正量波形を求める。そして、低速RFV実測値によって得られる低速RFV実測値波形から低速RFV必要修正量波形を減算することにより低速RFVの修正目標波形を求める。
(もっと読む)
1 - 20 / 29
[ Back to top ]