
Fターム[2F069JJ11]の内容
測定手段を特定しない測長装置 (16,435) | 走査 (1,064) | 物体による走査 (373)
Fターム[2F069JJ11]の下位に属するFターム
Fターム[2F069JJ11]に分類される特許
1 - 20 / 44
印刷装置、その制御方法およびプログラム
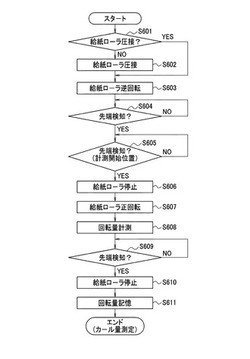
【課題】ロール紙のカール量を簡単な方法で測定することにより適正なカールの補正を行うことを目的とする。
【解決手段】ロール紙10が収納されたカートリッジ110と、前記カートリッジ110内のロール紙10の先端を検知する検知手段と、前記ロール紙10を回転させて、前記ロール紙10を搬送するための駆動手段と、前記検知手段により前記ロール紙10の先端を検知した後に、前記駆動手段により前記ロール紙10を回転させることにより、前記検知手段により再び前記ロール紙10の先端を検知し、前記ロール紙10の先端を検知してから、再び前記ロール紙10の先端を検知するまでの前記ロール紙10の搬送量に応じて、前記ロール紙10のカール量を判定するカール判定手段と、を有する。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
スティックスリップ検出装置および検出方法
【課題】スティックスリップの誤検出を高精度で抑制する。
【解決手段】弁軸変位より第1の状態量と第2の状態量とを算出し、第1のスティックスリップ指標算出部14において、第1の状態量と第2の状態量との比を第1のスティックスリップ指標SSpvとして求める。弁軸変位の制御指令値より第3の状態量と第4の状態量とを算出し、第2のスティックスリップ指標算出部24において、第3の状態量と第4の状態量との比を第2のスティックスリップ指標SSspとして求める。異常判断部30において、閾値をTh、第1の定数をα、第2の定数をβとし、「SSpv> Th AND SSpv>α・SSsp+β」を満足した場合に、スティックスリップが発生した判断する。
(もっと読む)
長尺体の直線度を測定する測定方法、携帯型測定用キット
【課題】長尺体の直線度を容易に測定することを考慮した方法を提供すること。
【解決手段】長尺体の直線度を測定する測定方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S2)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S3)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S4)と、を具備することを特徴とする。
(もっと読む)
表面性状測定機
【課題】測定時間の短縮が図れる表面性状測定機を提供する。
【解決手段】被測定物Wを載置する回転テーブル20と、被測定物の表面性状に応じた信号を発する検出手段30と、回転テーブルおよび検出手段を相対移動させる検出器駆動機構40と、検出手段からの信号を取り込み、この取り込んだ信号を処理して被測定物の形状や表面粗さなどの表面性状を求める処理装置60とを備える。検出手段は、複数の検出器31,32を含んで構成される。処理装置60は、複数の検出器31,32からの信号を順番に取り込んで処理する。
(もっと読む)
表面形状測定装置及び表面形状測定方法
【課題】複数の測定面領域が互いにオーバーラップ領域を持たない場合などでも、複数の面測定データの相対位置関係を高精度に合わせることができる表面形状測定装置及び表面形状測定方法を提供する。
【解決手段】表面形状測定装置10は、光学的表面形状測定機11と触針式検出器22などの高さ測定機を備え、光学式表面形状測定機11で測定した複数箇所の測定面領域の各面測定データにおける高さ測定点の各測定値の相対的位置関係を、高さ測定機22で測定した前記高さ測定点の各測定値の相対的位置関係に合わせるように前記各面測定データを移動補正する。
(もっと読む)
表面性状測定機の直角度誤差算出方法および校正用治具
【課題】簡易でかつ安価な校正用治具を用いて直角度誤差を簡易にかつ高精度に算出可能な表面性状測定機の直角度誤差算出方法および校正用治具を提供する。
【解決手段】3つの基準球62A〜62Cを校正プレート61に直角に配置した校正用治具60を、テーブル16上に配置し、接触式検出器20によって3つの基準球の中心座標を求め(第1測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ1を算出する(第1角度算出工程)。次に、校正用治具を、同一面内で90度回転させてテーブル上に配置し、接触式検出器によって3つの基準球の中心座標を求め(第2測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ2を算出する(第2角度算出工程)。最後に、交差角度θ1,θ2とからY軸駆動機構17の移動方向とX軸駆動機構48の移動方向との直角度誤差を算出する(直角度誤差算出工程)。
(もっと読む)
重心高さ計測装置、自動車検査システム、及び重心高さ計測方法
【課題】正確に且つ短時間で物体の重心高さを測定することができる重心高さ計測装置、及び重心高さ計測方法を提供する。
【解決手段】本実施形態に係る重心高さ計測装置40は、振り子の原理により物体の重心高さを計測する重心高さ計測装置40であって、車両(物体)1を搭載する揺動ユニット19と、揺動ユニット19を支持して左右対称な振り子の円弧軌道に沿って揺動させる揺動ガイド28と、揺動ユニット19に応力を与えて揺動ユニット19を揺動させる揺動手段16と、揺動ユニット19の揺動周期を検知する変位センサ(揺動周期検知手段)8と、変位センサ8により検知された揺動周期に基づいて車両1の重心位置を演算する重心位置演算手段10と、を備えて構成されている。
(もっと読む)
被加工物の真直度校正方法
【課題】 表面形状測定装置を介して工作機械のワークテーブル上の加工ワークの真直度を測定し、その測定された真直度の値を校正する方法の提供。
【解決手段】 一対の平面鏡(M1,M2)を距離d離して両端に設けた姿勢表示物体2を1個、変位センサ4を用い、長尺の被測定物(加工ワーク)wを距離dずつ移動さして変位センサ4により被測定物の真直度を測定し、この測定値に含まれる装置の運動誤差誤差を差し引く校正を行うので、短い姿勢表示物体2を用いて長い被測定物の真直度を校正することができる。
(もっと読む)
径計測装置
【課題】ダム洪水吐ゲートなどの開閉動作を行うものであって水中に浸漬された線条体等に対して、高精度に安定してその線径(外径寸法)を計測できる径計測装置を提供する。
【解決手段】線条体の外径寸法を計測するための計測手段が付設された移動部材25と、移動部材25を線条体16に沿って移動させる制御手段26とを備えた径計測装置である。移動部材25は、線条体16に着脱自在に固定される移動本体30及び移動副体33を備える。制御手段26はチャック制御部53と移動制御部54とを備える。チャック制御部53は、移動本体20を固定している状態で移動副体33の固定を解除し、移動副体33を固定している状態で移動本体30の固定を解除する。移動制御部54は、移動本体30を固定している状態で移動副体33を線条体長手方向に沿って移動させ、移動副体33を固定している状態で移動本体30を線条体長手方向に沿って移動させる。
(もっと読む)
三次元測定機
【課題】被測定物の大きさに拘わらず、プローブの接触を確認しながら測定を実行することができる三次元測定機を提供する。
【解決手段】被測定物を載置するテーブルとプローブとを三次元方向へ相対移動させる相対移動機構13と、相対移動機構の駆動を指令する携帯可能な操作盤30と、操作盤からの指令に基づき相対移動機構を駆動させるとともに、プローブからの信号を取り込んで被測定物の形状を求める制御装置40とを備える。プローブの近傍にはカメラ20が取り付けられ、操作盤30には、表示部34と、カメラによって撮像された画像を表示部に表示する制御部38とが設けられている。
(もっと読む)
関節角度計測装置
【課題】従来の関節角度計測装置は、ビデオカメラによって被験者を撮影するスペースや、画像解析を行うコンピュータ等が必要となるので、設備が大がかりなものとなり、製品コストが増大している。
【解決手段】本発明による関節角度計測装置は、例えば上腕及び前腕や腰及び上腿等の関節を挟む第1及び第2部位に第1及び第2慣性センサ1,2が取付けられ、信号処理器3の信号回路34がcos−1(X1・X2+Y1・Y2+Z1・Z2)の演算を行うことで関節の曲げ角度φを算出する構成である。
(もっと読む)
ホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法
【課題】本発明の課題は、ガントリーステージ直交性誤差に関連する問題を解決することである。
【解決手段】本発明によるホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法は、直交性に構造的に一致するガントリーステージの現在位置のエンコーダ値を解読して記憶する工程と、ガントリーステージを低速で駆動している状態で、ガントリーステージのマスター軸およびスレーブ軸上にそれぞれ設定されたホーミング処理用のセンサまたはエンコーダのインデックス信号をモニタする工程と、インデックス信号が検出された場合、認知された位置のマスター軸またはスレーブ軸のリニアエンコーダ値を解読する工程とを備えていることを特徴とする。
(もっと読む)
真直度測定装置
【課題】ゼロ点ずれを精度良く検出すること。
【解決手段】第1の形状測定器(P1,P1′)と、第2の形状測定器(P3,P3′)と、第3の形状測定器(P5,P5′)と、形状測定器(P1〜P5′)を支持する支持部材(7)を有し移動方向下流側に向って第1の形状測定器(P1,P1′)と第2の形状測定器(P1,P1′)と第3の形状測定器(P1,P1′)とが配置された測定ユニット(U1)と、第1の形状測定器(P1,P1′)と第2の形状測定器(P3,P3′)との相対的な位置ずれ量を測定する測定ユニット(U1)と一体的に移動可能な第1のずれ量測定器(36)と、第1の形状測定器(P1,P1′)と第3の形状測定器(P5,P5′)との相対的な位置ずれ量を測定する測定ユニット(U1)と一体的に移動可能な第2のずれ量測定器(37)と、を備えた真直度測定装置(A)。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
車両のホイールアライメント調整方法
【課題】専用の評価装置を設けることなく、アライメント調整装置でスラスト角を調整できる車両のホイールアライメント調整方法を提供すること。
【解決手段】本発明の車両のホイールアライメント調整方法は、車両の左右前後の車輪の位置を検出するステップと、予め設定されている装置中心線MCに平行な方向への車輪13、14のずれ量を測定するセットバック量測定ステップと、左右の車輪13、14の装置中心線MCに直交する方向の距離を測定するトレッド量測定ステップと、測定ステップにより測定したセットバック量Sおよび後軸トレッド量TBに基づいて、スラスト角θを算出するステップと、を備える。
(もっと読む)
移動機構の防塵装置および測定機
【課題】可動部材への影響を極力低減できる防塵装置およびこれを用いた測定機を提供する。
【解決手段】ステージ2を挟む第1蛇腹部材31および第2蛇腹部材32と、蛇腹部材31,32の伸縮方向に対して直交する幅方向両端側にステージ2の移動方向に沿って配置され蛇腹部材31,32のステージ側端部をガイドするガイド機構50と、ステージ2の移動に同期して第1蛇腹部材31および第2蛇腹部材32が伸縮するように、ステージ2と第1蛇腹部材31の連結部材33および第2蛇腹部材32の連結部材34との間に掛け回されたワイヤ60とを備える。ワイヤ60は、ステージ2の略重心を通りかつステージ2の移動方向に沿った軸線上に配置されている。
(もっと読む)
移動機構の防塵装置および測定機
【課題】可動部材への影響を極力低減できる防塵装置およびこれを用いた測定機を提供する。
【解決手段】Y軸移動機構3を覆う帯状の1枚の防塵シート30を備える。防塵シート30は、ステージ2の移動領域のうち、ステージ2を挟んだ一方側の開口23を覆うとともに一端がステージ2に連結された第1表面覆部31と、ステージ2を挟んだ他方側の開口23を覆うとともに他端がステージ2に連結された第2表面覆部32と、第1表面覆部の他端と第2表面覆部の一端とを連結するとともにY軸移動機構3を挟んで第1表面覆部および第2表面覆部とは反対側に配置された裏面覆部33とを有し、これらの覆部が前記可動部材の移動に伴って回行可能に構成されている。
(もっと読む)
形状測定装置
【課題】長尺大面積の直線形状や、面形状の測定における逐次3点法の零点調整を、工作機械やそれに類似する測定システム上に簡便に実現することができ、反転法と異なり長尺の被測定物の被測定対象面を置き直すことがなく測定ができる形状測定装置を提供する。
【解決手段】
形状測定装置は、変位センサ41〜43の検出感度軸方向Kが水平面に含まれるとともに互いに反対方向となる第2姿勢位置D2及び第3姿勢位置D3、及び水平面と直交する鉛直方向に向ける第1姿勢位置D1を取り得るようにホルダ38を回転自在に支持する姿勢可変機構を備える。形状測定装置は基準幅直定規を変位センサ41〜43の配列方向を走査方向として、該走査方向に走査測定することで得られる幅真直形状と基準幅直定規の校正値を比較することで変位センサ41〜43の零点調整誤差を算出し、被測定物の断面形状を逐次3点法で測定して、零点調整誤差に基づき校正する。
(もっと読む)
産業機械
【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
1 - 20 / 44
[ Back to top ]