
Fターム[2F069MM24]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 載置台 (170) | X−Yテーブル (48)
Fターム[2F069MM24]に分類される特許
1 - 20 / 48
基板の凹部の検査方法および基板のレジスト膜の検査方法
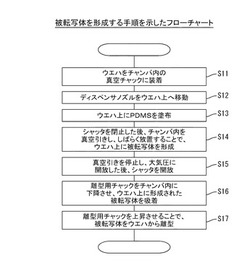
【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
測定用長尺状物の位置決め治具

【課題】 表面形状測定装置を介して工作機械のワークテーブル上の加工ワークの真直度を測定する際に使用する被測定物用位置決め治具の提供。
【解決手段】 位置決め治具7は、案内レール8a上をx軸方向に移動可能な基台8b上面の一方の端面近くに、ベース8cを設け、その上の一方の端にキネマカップリング機構9aを、他方の端に高さ位置調整機構9bとチルト機構9cを設けた。
(もっと読む)
産業機械
【課題】 移動機構の揺動を抑えて移動機構を移動させることができ、制御対象物による測定誤差を低減できる産業機械を提供する。
【解決手段】 三次元測定機1は、被測定物を載置するテーブル11と、テーブル11に対して移動可能な支持部213を有し、支持部213で支持されて所定の軸方向へ移動可能に設けられ、プローブ12を所定の軸方向へ移動させる移動機構2と、移動機構2を制御する制御装置と、門型フレーム21に取り付けられ、移動機構2と制御装置とを接続するケーブルを案内して収納するケーブルベア3とを備えるものであって、ケーブルベア3の重心を通ってZ軸方向に延びる重心軸線O−Oが、X軸方向において、支持部213の中心を通ってZ軸方向に延びる支持案内軸P−Pと一致している。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 測定対象物の表面プロファイルを、容易に算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並ぶ3個の変位計と、測定対象物との一方(稼動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。測定対象線に沿う表面プロファイル、可動物に固定された基準点の軌跡である倣い曲線のプロファイル、及び可動物の移動に伴うピッチング成分のプロファイルうち、2つのプロイファイルで規定される解の候補を複数個決定する。表面プロファイル、倣い曲線のプロファル、及びピッチング成分のプロファイルうち、解の候補に規定されていないプロファイルに基づいて定義される評価関数の値を適応度として、複数の解の候補に遺伝的アルゴリズムを適用し、最も適応度の高い解の候補を抽出する。
(もっと読む)
サーマルチャンバ
【課題】近年の基板サイズの大型化傾向に従って、基板を戴置するためのステージも大きくなってきている。このため、測定装置そのものが大きくなってきているこの大きくなった装置を収容するべく、サーマルチャンバは、送風ブース内のスペースの内容積が大きくなり、従って温同調節に必要な雰囲気容量が多くなるため、そのスペース内の温度性能を保つため、温調ユニットを大くしなければならないという問題があった。
【解決手段】測定装置のステージ部架台より出された支持金具によって、サーマルチャンバの送風ブースを支持し、石定盤より上方のステージ部分のみ、一定温度に保つ構造とし、更に好ましくは、温調ユニットと送風ブースとを分離することにより、温調ユニットの機械振動を送風ブースに伝えない機能を備えたサーマルチャンバとした。
(もっと読む)
位置決定用測定装置のXYテーブル
XYテーブルは、固定基準部分(B)と、該基準部分(B)に対して相対的に第1の方向(Y)に移動可能に保持されている中間部分(F)と、該中間部分(F)に対して相対的に第2の方向(X)に移動可能に保持されている物体(O)とを含む。この場合、処理されるべき部品(W)が物体(O)又は基準部分(B)上に配置される。さらに、第1の方向(Y)に対して、基準部分(B)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M1、M2)と、第2の方向(X)に対して、物体(O)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M3、M4)とを含む。これにより、部品(W)又は物体(O)におけるツール中心点(TCP)の位置(Xo、Yo)が測定可能である。1Dプラスエンコーダ(M1、M2、M3、M4)は、第1及び第2(Y、X)の方向に広がる平面であってツール中心点(TCP)を含む平面内へのそれらの投影が、XYテーブルの全走行領域内で部品(W)の外側に存在するように配置されている。これにより、アッベ(Abbe)条件が満足されるので、簡単な1Dプラスエンコーダを用いて物体(O)におけるツール中心点(TCP)の正確な測定を可能にする。 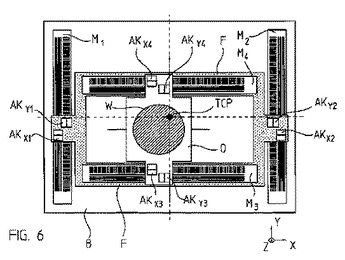 (もっと読む)
(もっと読む)
検査装置
【課題】測定試料を変えるたびごとに測定点の位置補正を行う必要がなく、更に、測定試料上の同一点についての複数種類の特性の測定を、同一検査装置を用いて行なうことができる検査装置を提供する。
【解決手段】試料を載置するためのステージ3と、1又は複数の検査機器6、7を支持可能な検査機器支持用ヘッド5と、ステージ及び/又は検査機器支持用ヘッドを支持している移動機構23、43と、ステージ上の基準点の実座標と目標座標との偏差を格納する偏差格納部と、複数の検査機器の測定点間のオフセット値を格納するオフセット値格納部と、格納された偏差及びオフセット値を参照して、複数の検査機器のうちのいずれか1つの検査機器の測定点と他の検査機器の測定点とが一致するように、ステージ及び/又は前記検査機器支持用ヘッドを移動させる位置制御部と、を備えている。
(もっと読む)
基板測定用ステージ
【課題】支持ピン3の位置再現性を向上させること、及び載置板2と支持ピン3間の移載において基板Wの水平方向のずれを防止することである。
【解決手段】基板Wの反りを測定する反り測定系7、及び当該基板Wの反り以外の物理量又は化学量を測定する通常測定系6に用いられる基板測定用ステージ1であって、前記通常測定系6の通常測定位置P1、及びその通常測定位置P1から下方に離間した退避位置P2の間を移動可能な載置板2と、前記載置板2に設けられた貫通孔21に挿通可能であり、前記反り測定系7の反り測定位置P3に固定された複数の支持ピン3と、前記載置板2を前記通常測定位置P1及び前記退避位置P2の間で昇降移動させる駆動機構と、を備え、前記反り測定位置P3が、前記通常測定位置P1及び退避位置P2の間に設定されている。
(もっと読む)
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)を備える。
(もっと読む)
座標測定装置の多座標測定テーブル用前進手段およびそのような前進手段の制御方法
【課題】 座標測定装置の多座標測定テーブル用前進手段およびそのような前進手段の制御方法を提供する。
【解決手段】 本発明は、座標軸(x、y)毎に摩擦ロッド(10、12)とモータとを有する駆動ユニット(22)を備える多座標測定テーブル用前進手段に関する。モータは、そのモータシャフト(19)で摩擦ロッド(10、12)の一方側と接触し、少なくとも1つの押圧ローラ(20)が、摩擦ロッド(10、12)の他方側と接触する。押圧ローラ(20)と、摩擦ロッド(10、12)と、モータシャフト(19)とを互いに対して押圧力で付勢することにより、モータシャフト(19)を摩擦ロッド(10、12)と摩擦係合させ、モータの回転運動を摩擦ロッド(10、12)の直線運動に変換する少なくとも1つの押圧手段(25)が設けられている。そのような前進手段を制御する方法も開示されている。
(もっと読む)
位置検出機能付きアクチュエータ
【課題】
位置検出センサの出力信号の減衰を懸念することなく当該位置検出センサとコントローラを接続することが可能であり、コントローラの小型化に資することが可能な位置検出機能付きアクチュエータを提供する。
【解決手段】
位置検出センサとコントローラとを接続する信号ケーブルとして湾曲自在なフレキシブルプリント基板を用い、かかる信号ケーブルは、前記X方向センサ部に接続されると共に前記第2部材に固定される固定配設部と、この固定配設部から連続すると共に前記第2部材から引き出されて前記コントローラに接続される可動余裕部とから構成されており、前記信号ケーブルの固定配設部には、前記X方向センサ部が出力したアナログ信号をデジタル信号に変換するA/Dコンバータを実装した。
(もっと読む)
長尺体の表面形状測定方法および表面形状測定装置
【課題】オートコリメータでは高精度測定ができない長さが1m以上の長尺状物の表面形状(真直度)を複数の変位センサを用いて測定する。
【解決手段】3本の変位センサA,B,Cをピッチ間隔p毎に直列にアーム311に固定し、テーブル上に固定された被測定物の真直度を、オートコリメータが高精度に測定できる作動範囲ではオートコリメータにより測定される値を用いて2本の変位センサA,Bにより2点法で検出された真直度値のピッチングの補正を行って初期真直度値データ列を得、オートコリメータが高精度に測定できない作動範囲における真直度の測定においては第三の変位センサCより検出される真直度値で測定基準を作り、この測定基準の測定点の値を基準にして変位センサA,Bによる2点法の出力からピッチングを検出し、それを使用してピッチング補正しながら次々に繰り返して測定範囲を広げて延長真直度値データ列を得、真直度曲線を出力する。
(もっと読む)
形態測定装置および形態測定方法
【課題】薄板を傷付けることなく且つ反りを生じることなくセットステージに載置することができると共に、セットステージへの固定および固定解除を瞬時に行うことができる形態測定装置を提供することを課題とする。
【解決手段】帯電性を有する薄板W上に形成された薄膜の形態および帯電性を有する薄板の表面の形態のいずれかを、非接触で測定する形態測定装置1において、薄板Wをセットするセットステージ4と、セットステージ4にセットした薄板Wに非接触で臨み、薄膜の形態または薄板の表面の形態を測定する測定器6と、を備え、セットステージ4には、薄板Wを静電吸着する静電吸着機構5が組み込まれている。
(もっと読む)
形状測定装置
【課題】 表面形状の計測を高精度化することができ、触針を簡易に支持することによって小型の形状測定装置を提供すること。
【解決手段】 XYステージ装置82に設けたX駆動装置50がエアスライドによって可動部52を非接触で支持しリニアモータ51a,51bによって可動部52を駆動するので、載置台82aのXY軸方向に関する運動が滑らかで高精度になる。よって、光学素子OEをXY面内で移動させる際にZ軸方向の微小変位が生じにくくなり、触針11の変位量計測を正確にすることができ、光学素子OEの表面形状の計測精度を向上させることができる。
(もっと読む)
顕微鏡システム、観察方法および観察プログラム
【課題】対象物の所望の位置を容易かつ迅速に観察することができる顕微鏡システム、顕微鏡システムを用いた観察方法および観察プログラムを提供する。
【解決手段】顕微鏡システムにおいて、使用者は、原子間力顕微鏡の試料載置台上に試料を載置し(ステップS1)、光学顕微鏡による試料の観察を行う(ステップS2)。使用者は、光学顕微鏡による試料の観察時に光学顕微鏡の倍率の調整を行う(ステップS2a)。また、使用者は、光学顕微鏡による試料の観察時に原子間力顕微鏡による試料の観察対象領域の探索も行う(ステップS2b)。続いて、使用者は、ステップS2bにおいて探索した観察対象領域の中から、さらに原子間力顕微鏡による試料の観察対象領域を指定する(ステップS3)。その後、使用者は、ステップS3において指定した観察対象領域について原子間力顕微鏡による試料の観察を行う(ステップS4)。
(もっと読む)
1 - 20 / 48
[ Back to top ]