
Fターム[2F129BB03]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 人工衛星 (10,969) | GPS (10,839)
Fターム[2F129BB03]に分類される特許
10,781 - 10,800 / 10,839
移動体通信装置
【目的】 本発明は、移動中に通信を行なう移動体通信装置に関し、移動体の無線通信システムの通信不能状態を減少させたり、移動体の経路誘導を的確に行ったり、地図情報の誤りを速やかに伝えたりすることを目的とする。
【構成】 地図情報を格納した地図記憶手段と、地図情報に対応づけて通信不可能あるいは通信可能な領域情報を記憶する領域記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の検出した現在位置をもとに領域記憶手段を探索して移動体の移動方向に通信不可能領域があると判明したときに、通信不可能領域を回避した複数の経路を見つけて通信不可能領域を通過する距離あるいは時間が最も短い経路に移動体を誘導する手段と
を備える。
(もっと読む)
ナビゲーション装置及びその地図表示制御プログラム

【目的】地図の縮尺変更をズーム的に行いアニメーション効果を加えビジュアル性の高いナビゲーション装置及び画面表示制御プログラムを提供。
【構成】(a)装置が起動すると、(b)データベースの地図データに基づくルート案内が開始され、(c)表示地図の案内ルートにおける次の案内地点が画面上の予め定めた広域表示判定枠の外又は詳細表示判定枠の中にあるかを判定し、(d)NOの場合は現在の表示画面を維持し、YESの場合は現在地点と次の案内地点が画面内に収まる最大の縮尺値を算出し、(e)現在の画面表示縮尺値と算出された算出縮尺値との間に中間縮尺値1/N1、1/N2、・・を設定し、(f)算出縮尺の詳細地図または広域地図になるまで前記分割したそれぞれの縮尺で縮小化の順又は拡大化の順に所定時間間隔τで順次描画し、(g)算出縮尺の地図をズーム的なアニメーション効果を伴って表示する処理をコンピュータで行う。
(もっと読む)
待ち合わせ場所決定装置およびその方法
【課題】 待ち合わせをする者のスケジュールをあらかじめ入力しておくことなく、将来における適切な待ち合わせ場所を決定することができる待ち合わせ場所決定装置を提供する。
【解決手段】 複数人が待ち合わせる場所を決定する装置であって、複数人の移動履歴を取得する移動履歴取得部1100と、移動履歴における共通位置を抽出する共通位置情報検出部1103と、抽出した共通位置に基づいて待ち合わせ場所を決定する待ち合わせ場所決定部1105とを備える。
(もっと読む)
コンテンツ表示装置およびコンテンツ表示方法
【課題】 位置情報に関連付けられるコンテンツの検索結果の一覧リストを、ユーザが視認し易いように動的に更新することができるコンテンツ表示装置およびコンテンツ表示方法を提供すること。
【解決手段】 本発明は、通信インタフェース部202または放送インタフェース部201を介しサーバから位置情報と関連づけられたメタデータ集合を取得し、現在位置情報取得部208で現在位置情報を取得し、コンテンツ処理部203でメタデータ集合から現在位置情報を含む検索条件に合致するコンテンツリストを出力する。そして、本発明は、コンテンツリストに基づき表示リストを生成する際、コンテンツ表示制御部204はコンテンツリストと表示リストとを比較し、一致するメタデータは、表示の仕方を変えずに表示リストを生成し、コンテンツ表示制御部204が生成した表示リストに基づき検索結果をブラウザ部205に表示する。
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】 CPUの負荷に応じて測位部を選択し、CPU負荷の分散、軽減を図る。また、場面に応じて必要とする測位精度の測位部を選択する。
【解決手段】 GPS測位部20は、第1測位部21と第2測位部22とを備える。第1測位部21は準天頂衛星から高精度測位情報を受信し、高精度測位情報に基づき、第2測位部22よりも精度の高い高精度測位方式で測位する。第2測位部22はGPS単独測位を行なう。切替部24は2つの測位部を選択的に切り替える。切替部24は、判定部30が出力する判定信号に従い測位部を切り替える。判定条件設定部33は判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は入力した判定条件信号と車速検知部90等から入力される判定対象信号81等に基づきどちらの測位部を選択するかの判定を行う。選択判定部34は判定結果を判定信号として切替部24に出力する。
(もっと読む)
映像を使用してナビゲーションシステムを操作する方法
【課題】 映像を収集して、その映像を使用してナビゲーション特徴を与えるための方法及びシステムを提供する。
【解決手段】 ナビゲーションシステムを操作する方法は、原点と行先との間のルートの一部分が通る地理的エリアの映像を用意することを含む。この映像は、ほぼ360度の映像でよい。この方法は、映像上にガイダンス情報オーバーレイを設けることを含む。ガイダンス情報オーバーレイは、ルートハイライト、操縦矢印、進行した経路の指示、メインルート及び代替ルートの識別、並びにラベルを含むことができる。
(もっと読む)
三次元での高精度のリアルタイムのトラッキング及び位置決定用のシステム及び方法
対象物のGPS座標と、対象物の移動に関連する方向とを生成することにより、対象物をトラッキングする方法とシステムである。GPS座標は緯度と経度と高度とを有し、それらが処理される。GPS座標は、対象物の高度を構造物内での層を特定する識別子に関係付けるように処理され得ることである。対象物を表すアイコンは、三次元モデルの第1の図に正確に配置され得る。対象物の層、対象物の方向、及び/又は対象物のGPS座標を示すために、インジケータがアイコンに関連付けられ得る。対象物のGPS座標は、第2の対象物の位置と比較され、発送の命令を決定してもよい。対象物は、人、車両、船又は飛行機でもよい。 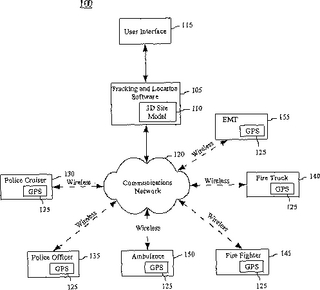 (もっと読む)
(もっと読む)
位置に基づく機能性を含む遠隔電子システムの無線制御のためのシステム及び方法
無線制御システムの位置に基づいて遠隔電子システムのための無線制御信号をカスタマイズするための無線制御システムは、送信機回路と、インタフェース回路と、制御回路とを含む。該送信機回路は、該遠隔電子システムを制御する制御データを有する無線制御信号を送信するように構成される。該インタフェース回路は、ナビゲーションデータソースからナビゲーションデータを受信するように構成される。該制御回路は送信コマンドを受信し、ナビゲーションデータを受信し、該ナビゲーションデータに基づいて現在位置を決定し、該送信機回路に該現在位置に関連付けられた無線制御信号を送信するように命令するように構成される。 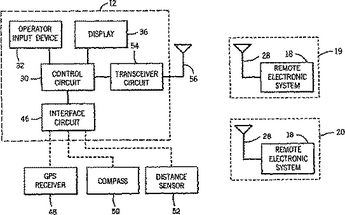 (もっと読む)
(もっと読む)
ワイヤレスデバイスを使用して位置を指定する方法とシステム
【課題】ユーザフレンドリなやり方で位置データを提供する手法を提供する。
【解決手段】本発明によれば、ワイヤレスデバイスを使用して位置を指定する方法およびシステムが提供される。ワイヤレスデバイスは、位置データのビューをユーザへ表示する。位置データは、地理的な地図、または、都市、近所、会社、交差点、通り、目印などのリストなど、地理的な領域内の容易に認識できるフィーチャを含む。ユーザはビューから特定の位置データを選択し、選択した位置データはより詳細に表示される。所望の詳細レベルで位置を指定できるまで、特定の位置データを選択するプロセルおよびその位置データをより詳細に表示するプロセスが継続する。
(もっと読む)
移動体端末
【課題】 ユーザが利用しようとする情報を簡単な構成でユーザの移動先に応じて適切に提供する移動体端末を提供する。
【解決手段】 移動体端末たる携帯電話1201は、ネットワークを介して取得されたテキスト情報の示す駅をユーザの移動先の候補とし、前記テキスト情報を蓄積する移動先候補蓄積部1102と、携帯電話1201が乗車駅の改札を通過したときに、乗車駅に関する乗車情報を検出する乗車駅検出部1103と、乗車駅検出部1103で検出された乗車情報をもとに、移動先候補蓄積部1102に蓄積されているテキスト情報の示す駅から、ユーザの移動先となる駅を決定する移動先予測部1104と、移動先予測部1104で決定された駅に関する情報を提供する情報提供部1105とを備える。
(もっと読む)
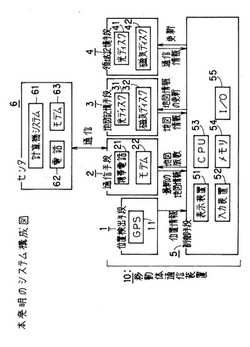
親局制御運行支援及び管理方法、移動体の位置決め方法
【課題】移動体の詳細な位置決めと、運行支援・管理機能の向上・効率化をはかる。
【解決手段】親局に地図情報を格納し、子局の衛星信号受信機構127、ジャイロスコープ129からの衛星信号及びジャイロ情報を親局やへ送る。親局では、衛星信号から当該移動体の大まかな位置を検出し、地図と合わせて正確な初期位置を決め、その後はその位置とジャイロ情報とから時系列的に地図上の位置を定め、それを子局へ送る。更に親局では各子局の各時点の位置から道路等に関する情報を収集し、これに基づく道路等の情報を子局へ送信する。
(もっと読む)
移動体用情報再生装置および記録再生装置
【課題】 チェンジャータイプのCDドライバを利用し、ナビゲーションとビデオCD等の光ディスクを再生可能な、車載用マルチメディアシステムを提供する。
【解決手段】 画像情報あるいは音声情報の少なくともいずれか一方を含む複数種類かつ複数枚の記録媒体を再生する手段と、複数種の記録媒体の内少なくとも一つに移動体の運行を案内する地図情報が記録されている場合に移動体の位置を計測する手段と、地図情報を表示し該地図情報上に計測手段で計測された移動体の位置を表示する地図表示手段と、地図情報以外が記録された他の記録媒体の画像情報を表示する手段と、他の記録媒体に記録されている音声情報を処理し音声信号として出力する手段とを備え、所定の記録媒体が再生され、地図表示手段によって表示されている情報に関連した案内情報を他の記録媒体より再生して、画像上に表示または音声出力するように構成した。
(もっと読む)
経路選出方法およびシステム並びに記録媒体
【課題】 使用者が走行した道路を適切に反映させた経路を選出することができる経路選出方法およびシステム並びに記録媒体を提供する。
【解決手段】 区間走行経路作成部6は、現在位置・走行軌跡検出部2が検出した車両の走行軌跡と最適経路探索部5が探索した最適経路とを入力し、これらを比較して異なる道路区間を区間走行経路として抽出する。区間走行経路記憶部7は、抽出した区間走行経路およびその属性情報を記憶する。交差区間調査部8は、誘導案内の際には、まず最適経路探索部5が探索した最適経路上の任意の2地点を区間とする区間走行経路が、区間走行経路記憶部7に存在するかを調査し、存在する場合には当該区間走行経路を区間走行経路記憶部7から抜き出す。案内用経路作成部9は、最適経路と抜き出した区間走行経路とを元に、最適経路上の該当する2地点区間を区間走行経路に置き換えて、誘導案内用経路を作成する。
(もっと読む)
ナビゲーション装置
ガイドのためにガイドオブジェクトが交通路に対して、該ガイドオブジェクトが車両によって行われるべき運転操縦を実施するように表示される、交通路網において車両をガイドするためのナビゲーション装置が提案される。運転者は運転者に示される運転操縦を繰り返し、こうしてその前に計算された走行ルートに従う。 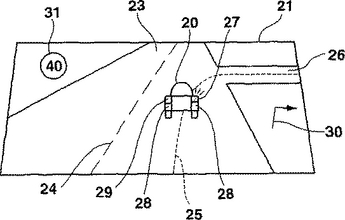 (もっと読む)
(もっと読む)
自動地上走行管理
【課題】
【解決手段】輸送体を所定の箇所に移動させる方法は、可能性のある地上走行ルートのリアルタイムイメージを生成する工程と、リアルタイムイメージを格納されたイメージと比較して、可能性のある地上走行ルートが輸送体の箇所と所定の中継地との間で障害物がないかどうかを判断する工程と、可能性のある地上走行ルートに障害物がなければ、輸送体を中継地に地上走行させる工程を有する。本方法を実行する装置もまた、提供される。
(もっと読む)
情報表示制御装置、ナビゲーション装置、情報表示制御装置の制御方法、情報表示制御装置の制御プログラム、およびコンピュータ読取可能な記録媒体
イメージデータ取得部が、表示装置に表示される地図情報を、地図情報記憶部から読み出しイメージデータに変換してイメージデータ記憶メモリに記憶させ、変更表示制御部が、イメージデータを読み出し、表示装置に縮小または拡大表示させ、確定サイズ情報生成部が、地図情報記憶部から地図情報を読み出し、当該地図情報の縮小または拡大率をユーザ指示における表示倍率に合わせた確定サイズ情報に変換し、確定表示制御部が当該確定サイズ情報を表示装置に表示させることにより、表示装置に表示された情報を、表示精度が良く、視認できる簡単な操作でユーザの好みの表示倍率の情報に変換することができる情報表示制御装置を実現することができる。 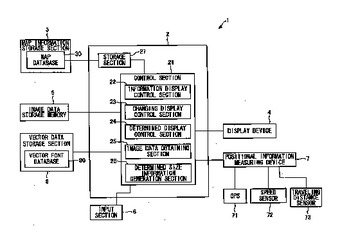 (もっと読む)
(もっと読む)
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 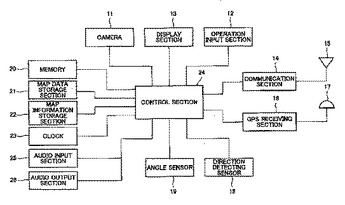 (もっと読む)
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 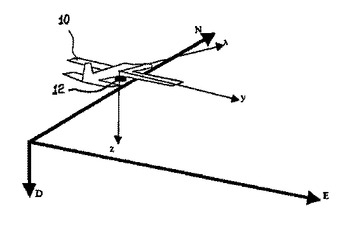 (もっと読む)
(もっと読む)
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 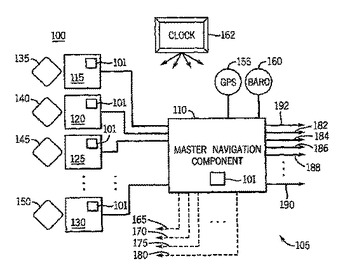 (もっと読む)
(もっと読む)
10,781 - 10,800 / 10,839
[ Back to top ]