
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
1,981 - 2,000 / 2,582
車両位置検出システム

【課題】車両に高価な地図データを備えることなく、車両の現在位置を精度よく決定することができる車両位置検出システムを提供する。
【解決手段】車両外部に地図データを有する情報処理センタ200を設け、車載器100では、車両の走行軌跡を決定して、その決定した走行軌跡を情報処理センタ200へ送信する。そして、情報処理センタ200において走行軌跡を地図データ上の道路に適合させる所謂マップマッチング処理を行うことにより、車両の現在位置を補正する。これにより、車両に高価な地図データを備えることなく、車両の現在位置を精度よく決定することができる。
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム

【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
画像における対象物を認識する方法および画像認識デバイス
【課題】画像における対象物を認識する方法を提供すること。
【解決手段】画像における対象物を認識する方法であって、該方法は、該画像に対応する画像データを抽出するステップと、デジタルマップ情報を抽出するステップであって、該デジタルマップ情報は、該画像によって表されたエリアの少なくとも一部についてのマップ情報を含み、該デジタルマップ情報は、該対象物についての情報を含む、ステップと、該画像データおよびデジタルマップ情報を評価することによって該対象物を認識するステップであって、該画像データおよび該デジタルマップ情報の両方は、該対象物を認識するために評価される、ステップとを包含する、方法。
(もっと読む)
情報配信システム
【課題】車両の現在位置に応じて、より有用な地点情報を提供することができる情報配信システムを提供する。
【解決手段】情報配信システム10は、車載装置20と、情報配信サーバ30からなり、車載装置から現在位置、道路種別、地点情報(POI)のカテゴリが情報配信サーバに送信され、情報配信サーバは、道路種別、POIのカテゴリから現在位置周辺に登録されているPOIを検索し、車両13へ送信する。車両は、受信したPOIを表示手段に表示する。情報配信サーバでの検索範囲は、車速等に応じて変更する。
(もっと読む)
車両用運転支援装置、及び、運転支援システム
【課題】他車両の運転者に関する情報に基づいて適切な運転支援制御を行なうことが可能な車両用運転支援装置、及びこれを含む運転支援システムを提供すること。
【解決手段】自車両の現在位置を特定する現在位置特定手段と、無線通信を行なう通信手段と、運転支援動作を行なう車載機器を制御する制御手段と、を備え、現在位置特定手段により特定された自車両の現在位置を含む要求信号を通信手段により車外設備に送信し、要求信号に対する応答として通信手段により受信された自車両周辺を走行する他車両の運転者に関する運転者情報に基づいて、制御手段の制御内容を決定及び/又は変更することを特徴とする、車両用運転支援装置。
(もっと読む)
走行位置検知装置
【課題】移動体の接地位置を高精度に検知する。
【解決手段】走行位置検知装置10は、GPS電波受信アンテナ11により受信したGPSデータに基づいて装置本体の位置を示す「GPS位置データ」を一定時間毎に算出するGPS位置測位処理部12と、装置本体の路面に対する傾斜データを検出するための傾斜センサ15と、“前回のGPS位置データ”が算出されてから“新たなGPS位置データ”が算出されるまでの間、前回の位置データからの移動距離を求めて装置本体の位置を示す「自律位置データ」を一定時間毎に算出する自律位置測位処理部17と、位置データに対して路面の傾きを補正して、移動体5の接地位置データを算出する接地位置算出部18とを備える。
(もっと読む)
経路案内装置
【課題】ユーザの意図が適切に反映された態様で目的地案内を終了させることができる経路案内装置の提供。
【解決手段】ユーザによる情報の入力が可能な入力装置130に接続され、自車の位置を検出する自車位置検出部102と、入力手段を介して設定された目的地(以下、「設定目的地」という)まで経路案内を行う経路案内部104とを備える経路案内装置100において、経路案内部104が、自車位置が設定目的地に対して所定の第1距離L1内に至るまで経路案内を継続する第1の案内モードと、自車位置が設定目的地に対して前記第1距離よりも長い第2距離L2内になるまで経路案内を継続する第2の案内モードとを備え、入力装置130を介して入力された切替指令に応じて、経路案内部104の案内モードを切り替えるモード切替部112を備えることを特徴とする。
(もっと読む)
車両用ナビゲーション装置
【課題】目的地が設定された地点や目的地が設定された日時を絞り込んで、目的地として設定された目的地設定回数を報知する。
【解決手段】設定された目的地の位置を示す目的地位置情報、目的地が設定された地点を示す目的地設定地点情報および目的地が設定された日時を示す目的地設定日時情報を情報センタ4へ送信しておく(S130)。目的地位置情報、目的地設定地点情報および目的地設定日時情報が蓄積されたデータベース42を有する情報センタ4から、ユーザの操作によって指定された絞込条件に該当する施設の目的地として設定された目的地設定回数を取得して(S130、S132)、報知装置から報知させる(S134)。
(もっと読む)
ナビゲーション装置、位置検出方法及び位置検出プログラム
【課題】測位情報を取得できないときであっても、移動体の速度及び現在位置を高精度に算出できるようにする。
【解決手段】自律速度算出ユニット11は、クレードル着脱検出部16からの着脱情報CDを基に、ナビゲーション装置1がクレードル4に装着されている場合、学習した取付傾きを用いて高精度な自律速度Vtを算出することができ、一方ナビゲーション装置1がクレードル4から取り外されたことを認識した場合、学習したセンサ座標系が変化したことを認識して学習結果である加速度センサ14の取付傾きを用いた自律速度Vtの算出を中止するため、誤った自律速度Vtの出力を未然に防止することができ、ナビゲーションユニット12における現在位置の算出精度を低下させずに済む。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 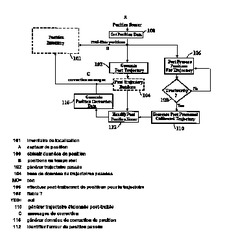 (もっと読む)
(もっと読む)
経路案内システム及び経路案内方法
【課題】道路のレーンが増減する場合でも、推奨レーンがどのレーンであるかを確実に判断することができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、前記自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、前記探索経路に基づいて、走行するのが推奨される推奨レーンを設定する推奨レーン設定処理手段と、レーン案内が行われている間にレーンが増減すると想定されるかどうかの判定を行うレーン増減判定処理手段と、レーン案内が行われている間にレーンが増減すると想定される場合、レーン案内を調整するレーン案内調整処理手段とを有する。レーン案内が行われている間、又はレーン案内が行われる前後に道路のレーンが増減すると想定される場合、レーン案内が調整されるので、案内中は、道路のレーン数が変化しない。
(もっと読む)
車両の走行安全装置
【課題】分岐点での進路予測精度を向上させる。
【解決手段】道路データに基づいて自車両の進路に存在する分岐点を検出する分岐点検出部14と、分岐点の前後における道路データに基づいて分岐点までの道路と、分岐点からの道路とが、同一のカーブにより構成されているか否かを判定する同一カーブ判定部16とを備え、進路予測部17は、分岐路からの道路である複数の分岐路のうち、同一カーブ判定部16によって分岐点までの道路と同一のカーブにより構成されていると判定された分岐路を、自車両の進路として設定する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
ポータブルナビゲーション装置
【課題】ナビゲーション装置が備える加速度センサを撮像処理に活用することによって、ナビゲーション装置に安価に撮像機能を付与することを可能にしたポータブルナビゲーション装置を実現する。
【解決手段】ポータブルナビゲーション装置1がナビゲーション機能用に備える加速度センサ51によって検出されたポータブルナビゲーション装置1に作用する加速度に基づいて、カメラ機能用に備える撮像部8により被写体を撮像する際に手振れに関する補正処理を実行することと、ポータブルナビゲーション装置1に作用する加速度が所定の加速度以上である場合に、ポータブルナビゲーション装置1の電源をオフに切り替えることを可能にした。
(もっと読む)
マップマッチング方法とそれを実施する装置
【課題】形状データに含まれるノード数が多い場合でも、少ないメモリ使用量で、且つ、高速で、その形状をデジタル地図上に特定できるマップマッチング方法を提供する。
【解決手段】デジタル地図の線形形状の上に並ぶノードの位置情報が配列された形状データを用いて、この線形形状を自己のデジタル地図の地図データに対応付けるマップマッチングにおいて、形状データを複数のブロックに分割し、マップマッチングをブロックの単位で行う。(a)6個のノードを含む形状データでは3個の候補点の組み合わせ数が729となるが、(b)これを3ブロックに分割すると、候補点の組み合わせ数は27となり、高速処理が可能であり、メモリ使用量は少なくて済む。
(もっと読む)
位置を推定する方法及び関連する装置
方法は、慣性位置情報、GPS情報、及び測距情報を、位置推定装置を使って受け取ることを含む。この方法は、慣性位置情報、GPS情報、及び測距情報の組み合わせに基づいて、位置推定装置の位置の推定を判断する。 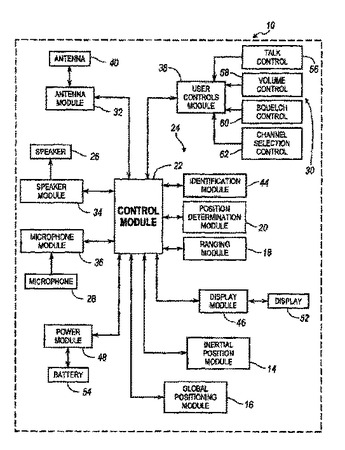 (もっと読む)
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】高度データを保持する記憶負担を低減し、かつ、前回測位時の不良な測位条件の影響を低減しつつ、2次元測位に使用するための正確な高度情報を取得することができる測位装置等を提供すること。
【解決手段】推定高度H1を示す推定高度情報を格納する推定高度情報格納手段と、SPS(Satellite Positioning System)衛星からの信号である衛星信号を受信する信号受信手段と、推定高度H1を使用して2次元測位を行って、2次元高度H2cを算出する2次元高度算出手段と、2次元測位の際に、予備3次元測位によって3次元高度H2bを算出する3次元高度算出手段と、推定高度情報を更新するために3次元高度H2b又は2次元高度H2cのいずれか一方を選択する高度選択手段と、高度選択手段によって選択した3次元高度H2b又は2次元高度H2cによって、推定高度H1を更新する更新手段と、を有する。
(もっと読む)
ランドマーク認識システム
【課題】車載カメラを使ったランドマーク認識情報を地図センタに報告する場合、画像認識の成績は撮影条件や装置の状態によって大きく変わるため、認識結果が地図データと異なる度に報告すると無駄が多い。
【解決手段】本発明は、ランドマークの認識結果とその確からしさを出力する画像認識手段,明るさ,コントラスト,天候等の条件から認識の困難さを評価する撮影条件評価手段,報告する場所が過去一定期間報告対象となっていないことを判断する認識履歴管理手段,認識スコア,撮影条件,報告履歴を考慮して地図センタに報告を上げるか否かを判断する送信条件判定手段を持つ。これにより、撮影条件が良く、送信履歴が無く、かつ認識スコアの高い場合のみ更新情報を地図センタに報告することで更新情報の確度を向上させ、報告の回数を低減する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】従来技術に比較して正確にマルチパス判定処理を行い、高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マルチパス判定楕円算出器23と、位置及び速度算出器22とを備える。マルチパス判定楕円算出器23は、現在位置とナビゲーション装置10の進行方向とに基づいてマルチパス判定楕円を算出する。位置及び速度算出器22は、受信無線信号のGPS衛星からナビゲーション装置までの伝搬距離とマルチパス判定楕円とに基づいて、受信無線信号がマルチパス合成信号であるか否かを判定するマルチパス判定処理を実行し、マルチパス合成信号でないと判定されたGPS衛星からの受信信号に基づいて自車位置を算出する。
(もっと読む)
車両用表示装置
【課題】一時的な外光量の低下の場合には表示器の表示モードの変化を制限する車両用表示装置を提供する。
【解決手段】例えば、立体交差道路や鉄道高架橋のような、道路上を走行する車両への外光の到達を遮るように存在し、車両が通過する際に瞬時的な遮光を生ずる瞬時遮光構造物が車両の進行方向に存在し、かつ車両の周囲の状態が明状態のときに、暗状態用の表示形態への切替を制限する車両用表示装置として提供可能である。
(もっと読む)
1,981 - 2,000 / 2,582
[ Back to top ]