
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
2,021 - 2,040 / 2,582
車両位置補正装置及び車両位置補正方法
【目的】前後方向の距離誤差(前後ズレ)を小さくでき、しかも、マップマッチング処理により急激な位置飛びが発生しないようにする「車両位置補正装置及び車両位置補正方法」を提供することである。
【構成】自立航法により測定した車両の測定位置とGPS測定法により測定した車両の測定位置とを用いて車両位置を補正する際、自立航法にる測定位置から車両方位方向に延長した直線にGPS測定位置から垂線を下ろし、該自立航法測定位置と前記垂線の足を結ぶ距離Dを算出する。しかる後、自立航法測定位置を、車両方位方向に距離Dの所定割合分シフトして得られた位置を車両位置とし、該車両位置を道路リンク上にマップマッチングする。
(もっと読む)
3次元マップマッチング処理装置、3次元マップマッチング処理方法、3次元マップマッチング処理プログラム、ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車

【課題】3次元座標データを用いて移動体の現在位置をマップマッチングするときに誤差の発生を抑制できるようにすることを課題とする。
【解決手段】ロケーションコンピュータ21では、現在位置および進行情報の情報に基づいて2次元マップマッチングが実行されて2次元位置情報が算出される。その2次元位置情報と3次元座標DB22に記憶される3次元座標データとに基づいてZ座標位置が算出される。さらに、移動体の移動上、Z座標位置に基づいてZ軸方向の勾配差が検出され、その勾配差に基づいて移動距離が補正されて3次元位置情報が算出される。画像処理装置27では、3次元位置情報に基づいて経路上の案内画像が生成される。その案内画像には自動車の傾斜補正が加味されて、カメラ7で撮影された実際の風景画像が重畳される。その結果はディスプレイ5に表示出力される。
(もっと読む)
信号機情報報知システム及び車載機
【課題】交通信号機の点灯状態をドライバに報知するシステムを、より簡単に構成する。
【解決手段】車載機1は、GPS受信機5より取得された車両の位置,及び自身が検知した車両の進行方向に基づいて、地図データ入力器6より自車両の走行経路上にある最も近い交差点の位置を特定すると、交差点の位置情報,進行方向情報,並びに自身を特定するID情報を送信する。指定信号機決定用演算装置12は、上記各情報を受信すると車両が前記交差点で対面する信号機16を特定し、信号機16のデータをID情報と共に交通管制センタ9の信号制御用コンピュータ14に送信する。信号制御用コンピュータ14は信号機16に関する点灯制御情報を車載機1に送信し、車載機1は、上記情報を受信して信号機16の点灯制御情報を表示装置7によりドライバに報知する。
(もっと読む)
車載用ナビゲーション装置及び道路種判別方法
【課題】一般道路や高速道路などの道路種を精度良く判別可能な車載用ナビゲーション装置を提供する。
【解決手段】撮像部12は自車両の後方の路面を撮像する。路面標示認識部13は撮像部12にて撮像された路面の画像から路面標示の認識を行う。路面凸状態認識部14は路面の画像から路面の高低の変化を路面凸状態として認識する。そして、判別部15は路面標示の認識結果と路面凸状態の認識結果を加味して道路種の判別を行う。
(もっと読む)
情報取得システム及びプログラム
【課題】所望の箇所についての必要な情報を取得するための作業を簡素化することができるようにする。
【解決手段】経路探索処理手段と、通信部38と、ナビゲーション装置が起動されたかどうかを判断する起動判定処理手段90と、登録箇所を登録する指定箇所登録処理手段と、ナビゲーション装置が起動されたときに目的地までの経路が探索されていない場合、通信部38を介して登録箇所を情報提供者に送信し、所定範囲内の交通情報を通信部38を介して取得し、経路が探索されている場合、探索された経路に沿った登録箇所だけを情報提供者に送信し、経路に沿った登録箇所から所定範囲内の交通情報を取得する情報取得処理手段91とを有する。登録箇所について情報提供者から送信された情報が自動的に取得されるので、交通情報を取得するための作業を簡素化することができる。
(もっと読む)
自己位置推定装置
【課題】 ランドマークが低い位置に設定されていたり、検出されるランドマークの数が少なかったりする場合でも、高い精度で自己位置を推定することができる自己推定装置を提供する。
【解決手段】 自己位置推定装置1は、ステレオカメラ2と自己位置推定ECU3を備える。自己位置推定ECU3は、ステレオカメラ2で撮影された画像からランドマークを抽出するとともに、自己位置からランドマークまでの距離を算出する。この抽出されたランドマークおよびランドマークまでの距離に基づいて、自己が存在可能である自己存在可能範囲を推定する。このとき、自己位置からランドマークまでの距離が短い場合には、自己位置からランドマークまでの距離が長い場合と比較して、自己存在可能範囲を狭く推定する。
(もっと読む)
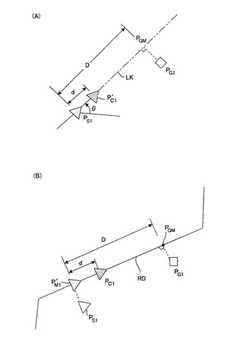
測量スティッチングを用いる位置測定方法
モバイル通信デバイスは、異なる出来事の間に取得されてもよい衛星輸送手段のような複数の参照基地局および/または基地局からの測量値を用いて初期設定されるカルマンフィルターのような測位フィルターを含む位置決定に関する方法を用いる。したがって、当該測位フィルターは、同じ測量の出来事の間の少なくとも3つの異なる信号の第1の取得を必要することなく、位置の推定値に関して用いられてもよい。 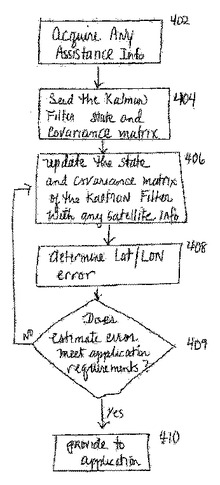 (もっと読む)
(もっと読む)
ハイブリッド位置判断システムにおける誤差推定値を判断するための方法および装置
【課題】マルチパシングによって生じる誤差を判断し、位置判断測定の誤差推定を向上する。
【解決手段】データベースを設定し、その中に、ビーコンに対する特定の疑似範囲の測定値に対して推定された誤差量を維持する。クラスタを定める。各クラスタは、選択したパラメータに対する値の範囲と関係付けられている。次に、疑似範囲の測定値は、疑似範囲の測定値をとった時間(または、その時間の前後を含む時間)における選択したパラメータ値に基づいて、特定のクラスタと関係付ける。求めた疑似範囲の測定値の推定値の数がより多くなると、クラスタのサイズ(すなわち、選択したパラメータ値の範囲)を小さくすることができる。選択したパラメータと疑似範囲の測定値における誤差との相関によって、クラスタのサイズが小さくなると、誤差推定値の分散が小さくなる。誤差推定値の平均値を使用して、将来の疑似範囲の測定値の誤差を補正する。
(もっと読む)
ナビゲーション装置及び経路案内方法
【課題】推奨ルートの自己交差部における進路についてもユーザが簡易に把握できるように、推奨ルートを地図上に表示する「ナビゲーション装置及び経路案内方法」を提供する。
【解決手段】交差点501を二度通過する推奨ルートが設定されている場合、交差点501の1回目の通過前は、推奨ルート図形33を、交差点501の2回目の通過に用いる区間を表す部分602を弱い調子で表した形態で表示する(a1)。そして、交差点501の1回目の通過後、2回目の通過前には、推奨ルート図形33を、交差点501の1回目の通過に用いた区間を表す部分601を弱い調子で表した形態で表示する。
(もっと読む)
標高検出装置および自車位置判定装置
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
(もっと読む)
地図表示制御装置および地図表示制御プログラム
【課題】地図を画像表示装置に表示させる車載用の地図表示制御装置において、画像表示装置中の地図のスクロールまたは縮尺変更のためにユーザがある操作を行ったとき、自車両が走行しているか否か、および、経路案内が行われているか否かによって、そのスクロール量が異なるようにする。
【解決手段】このように、車両用ナビゲーション装置は、自車両が走行しているか否か、経路案内が行われているか否かを判定し(120、160)、その両方が満たされているときに、ユーザがタッチパネルにスクロールの操作を行うと(110)、誘導経路のサイズに応じたスクロール量で地図画像をスクロールし(180、190)、また、ユーザがタッチパネルに縮尺変更の操作を行うと、誘導経路のサイズに応じた変化量だけ縮尺を変化させる。
(もっと読む)
車両用表示システム、ナビゲーションシステム
【課題】自車両と周囲の状況を把握容易に表示する現在位置表示システムを提供すること。
【解決手段】撮影手段を備えた路側装置から所定の撮影範囲の元画像を車両に送信する現在位置表示システムであって、車両は、該車両の位置を検出する位置検出手段14aと、道路地図を記憶した道路地図記憶手段15と、位置を含む道路地図を地図記憶手段から抽出して該車両の位置を示すマークと共に表示装置に表示する道路地図表示手段14dと、元画像を路面に略垂直な視点の平面画像に視点変換する画像変換手段14bと、平面画像を道路地図における前記撮影範囲に重畳すると共に、前記平面画像に撮影されている該車両に前記マークを重畳して表示する画像重畳手段14cと、を有することを特徴とする。
(もっと読む)
車載用ナビゲーション装置及び自車位置修正方法
【課題】マップマッチングによる自車位置の修正及びそれに基づいた画面表示を行うにあたり、画面上での自車位置の変動を大いに縮小し、安定した自車位置の表示に寄与することができる「車載用ナビゲーション装置及び自車位置修正方法」を提供すること。
【解決手段】車線用ナビゲーション装置において、地図データを参照して(S1)自車が走行中の道路の幅員あるいは車線数に応じて複数の仮想リンクを生成し(S6)、自車位置がGPS位置を中心とする所定の距離範囲から外れたときに、該自車位置をGPS位置に最も近い仮想リンク上へマップマッチングさせ(S7)、画面に表示されている当該走行中の道路の、当該仮想リンクに対応した位置に自車位置マークを表示する(S8)。さらに、走行車線間を区分する走行車線ラインも併せて表示する。
(もっと読む)
車両周辺撮影送信装置および車両周辺撮影送信プログラム
【課題】施設情報の更新を新規な方法で実現する。
【解決手段】車両2に搭載される車両用ナビゲーション装置は、自らの記憶媒体中の格納画像4が撮影された位置の情報および現在の車両位置に基づいて、他の車両によって当該格納画像が撮影されたときと同じ走行状態(走行位置、走行方向)に車両2があると判定すると、画像3を撮影し、格納画像4中の施設の画像と撮影画像3中の当該施設に該当する位置の画像とが同じか否かを判定し、その判定結果が肯定的なものであるときには、今回撮影した画像をセンタに無線送信する。
(もっと読む)
車両位置演算装置
【課題】 GPSといった無線通信手段を利用した場合であっても、車両の位置情報を的確に把握可能な車両制御システムを提供すること。
【解決手段】 この車両制御システム10は、車両が移動する移動方向を示す移動方向情報を取得する方向取得部301と、GPSといった車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得部302と、移動方向情報が示す移動方向と想定位置情報の変動方向とに基づいて、車両の位置を示す車両位置情報を算出する位置演算部303と、を備える。
(もっと読む)
車載機器制御システム及び車載機器
【課題】表示画面を有する車載機器を制御する車載機器制御システム及びそのシステムに用いられる車載機器において、表示画面を任意の画面表示にする際に、ユーザの操作負担を低減すること。
【解決手段】パソコンによって車載ナビゲーション装置100の動作をシミュレートして、パソコンのディスプレイに表示装置11と同一の画面であるシミュレート画面を表示させる。そして、そのシミュレート画面に対応するQRコードを、パソコンと接続されているプリンタから印刷する。この印刷したQRコードを、車両内に用意しておく。以後、そのQRコードに対応した画面にしたいときは、QRコードを携帯電話で読み込ませ、携帯電話から車載ナビゲーション装置100のBT通信装置17にQRコードを送信する。BT通信装置17がQRコードを受信した後は、制御回路9がQRコードの内容を解読し、表示装置11の画面をQRコードに対応した画面に切り替える。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】静止時及び微速移動時において、信頼性を有し、かつ、精度の高い位置を出力することができる測位装置等を提供すること。
【解決手段】測位衛星からの信号である衛星信号に基づいて、測位を行う測位装置20であって、参照位置Pを保持する位置保持手段と、測位装置20の移動状態を判断する移動状態判断手段と、移動状態に基づいて、参照位置Pと、測位によって算出した現在の測位位置Pg(n)を平均化して平均位置を算出する平均位置算出手段と、平均位置を出力する位置出力手段と、平均位置を参照位置Pとして位置保持手段に格納する位置格納手段と、を有する。
(もっと読む)
車載装置
【課題】 階層構造のメニューを音声認識により操作する車載装置において、認識精度を高くする技術を提供する。
【解決手段】 メニューの各階層における選択肢の識別情報を記憶装置に記憶しており、メニューの各階層における選択肢の識別情報を含む音声が入力されると、入力された音声をテキストデータに変換し、このテキストデータから階層毎の識別情報を抽出し、該抽出した識別情報の選択肢を特定し、この選択肢による処理結果を出力装置に出力する。
(もっと読む)
測位装置、その制御方法、制御プログラム及びその記録媒体
【課題】非同期の通信システムにおけるRTTを併用して2次元測位を行い、位置誤差の少ない位置を出力することができる測位装置等を提供すること。
【解決手段】SPS衛星からの衛星信号と、SPS衛星との時刻非同期の通信基地局からの通信信号を使用して2次元測位を行う測位装置20であって、衛星信号を受信して算出した擬似距離と前記SPS衛星の軌道情報に基づいて、測位装置の推定位置を示す推定線L2を算出する推定線算出手段と、通信信号が通信基地局と測位装置との間を往復する往復時間を取得する往復時間取得手段と、往復時間と通信基地局40の位置に基づいて、測位装置20の予想位置を示す予想円L3を算出する予想円算出手段と、推定線L2と予想円L3との共有点を算出する共有点算出手段と、共有点に基づいて、測位装置20が出力するための出力位置Pfixを算出する出力位置算出手段と、を有する。
(もっと読む)
測位装置、ナビゲーションシステム
【課題】GPS衛星が捕捉困難な状態であっても、従来の地図データを使用して、精度よく測位することができる測位装置、ナビゲーションシステムを提供すること。
【解決手段】GPS等の電波航法測位手段81により移動体の位置を検出する測位装置9において、移動体の挙動情報を検出する第1及び第2の自律センサ2、4、3と、測位結果に第1の自律センサによる検出情報を累積して推定位置及び推定方向を検出する位置検出手段82と、推定位置に基づき地図データ記憶手段5を参照し対応するリンクから所定距離の地図データ推定位置を検出する地図データ測位手段83と、測位結果に第2の自律センサによる検出情報を累積して累積推定方向を検出する方向検出手段84と、推定位置及び地図データ推定位置並びに推定方向及び累積推定方向をカルマンフィルタに適用して移動体の位置を推定する最尤位置推定手段85と、を有することを特徴とする。
(もっと読む)
2,021 - 2,040 / 2,582
[ Back to top ]