
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
721 - 740 / 898
省エネ運転支援システム
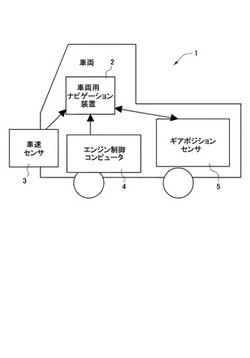
【課題】燃費が悪い運転をしている運転者に対してリアルタイムで通知して、運転技術を改善する省エネ運転支援システムを提供する。
【解決手段】車両用ナビゲーション装置2から、車両の現在位置情報と、目的地までのルートの地形情報を取得する。これらの情報を使って、車両の燃費が最もよくなるギア操作位置またはエンジン回転を算出し、運転者に通知する。これにより運転者は、燃費が最もよくなるギア操作位置とエンジン回転数をリアルタイムで知ることができ、運転技術の向上が図れる。
(もっと読む)
位置情報取得システム

【課題】GPSを利用した位置情報取得システムでありながら、誤差の少ない正確な位置情報の取得を実現できるようにする。
【解決手段】圃場の進入口に配置され且つ識別情報IDを有するRFIDタグ41と、RFIDタグ41の識別情報を読み取るタグリーダ42と、人工衛星STからの電波にて自己の測定位置情報を検出する移動局ユニット43と、RFIDタグ41の基準位置情報を識別情報に対応させて予め記憶した外部サーバ44と、トラクタ1に搭載したコントローラ40とを備える。タグリーダ42と移動局ユニット43とはトラクタ1に搭載する。コントローラ40は、トラクタ1が圃場の進入口にあるときに基準位置情報を外部サーバ44から取得し、このときの測定位置情報と基準位置情報とから補正情報を算出し、補正情報と測定位置情報とに基づいて、トラクタ1の現在の自己位置情報を算出する。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部230により探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置がマップマッチングにより得られた場合、再ルート探索制御部240が、推奨ルート上に車両が存在しないことが確実であると判断できるか否かを判定する。この判定の結果が肯定的であったときには、再ルート探索制御部240が、直ちに、再ルート探索指令をルート探索部230へ送る。この再ルート探索指令を受けたルート探索部230は、再ルート探索を行う。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部220による探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置が得られると、再ルート探索条件設定部231が、センサデータ処理部210から報告された移動状況情報を検出するセンサの検出結果精度に基づいて、マップマッチング位置の精度が低いと評価できるか否かを判定する。この判定の結果が否定的であった場合には、再ルート探索条件設定部231は、通常の再ルート探索条件である第1再ルート探索条件を設定する。一方、当該判定の結果が肯定的であった場合には、再ルート探索条件設定部231は、第1再ルート探索条件よりも条件満足までに時間がかかる第2再ルート探索条件を設定する。設定された再ルート探索条件が満足されると、再ルート探索が行われる。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
車載用ナビゲーション装置
【課題】簡易な構成で、ユーザに必要な最新の地図情報を追加する車載用ナビゲーション装置を提供する。
【解決手段】車両の周囲を撮影する撮影手段と、撮影された画像データから所定の画像パターンを検出するパターン検出手段と、画像パターンが撮影された位置を検出する位置検出手段と、画像パターンおよび当該画像パターンが撮影された位置を含むパターン情報を報知する報知手段と、パターン情報の記憶を指示する指示手段と、指示に基づきパターン情報を記憶するパターン情報記憶手段と、を備えることを特徴とする車載用ナビゲーション装置として提供可能である。
(もっと読む)
車載器
【課題】測位誤差を良好に除去して精度の高いGPS測位結果を安定的に取得する。
【解決手段】所定の基準値に対する車両の高度方向の変位量を推定する高度変位推定手段と、推定される変位量の絶対値が所定の閾値よりも大きいか否かを判定する変位量判定手段とを備え、該変位量が該閾値よりも大きいと判定され且つGPSにより少なくとも高度の測位が成されたとき、カルマンフィルタの機能をリセットする車載器を提供する。
(もっと読む)
地図表示装置及びプログラム
【課題】スキャナ等の読取装置を別途用いることなく目標地図データをより確実に取得し、この取得した目標地図データが示す地域の地図を地図データベースから検索して表示するための技術を提供する。
【解決手段】ランドマーク等サンプルデータ集であるテンプレートを表示し、これを基に目標地図を作成するための操作指示を受け付け目標地図データを入力する(S10)。この目標地図データからシンボルの情報を収集し(S30)、収集したシンボルの情報に基づいて目標地図と適合する候補地域を地図データベースから検索する(S40)。検出された各候補地域の名称等の一覧表である候補地域リストを表示し(S60)、この候補地域リストからユーザが指定した候補地域の地図を表示する(S70)。ユーザの意思と合致する候補地域があると判定した場合(S80:YES)、表示中の候補地域の地図を目的地周辺の地図として確定する(S90)。
(もっと読む)
緊急通報端末
【課題】緊急情報端末において、衛星測位システムを利用して位置情報を得ることができず、且つ無線基地局の設置位置が不明であっても、現在の概略位置を精度良く得ることを可能にする。
【解決手段】端末1は、CPU2aとRAM2bとを有する端末制御部2と、GPSにより端末位置を測位するGPS測位装置3と、無線基地局と通信する無線通信部4とを備えている。端末制御部2は、端末1が保持者により操作されて、測位装置3が位置情報を得たときに、そのとき無線通信部4が通信を行っている基地局の基地局IDコードと得られたGPS測位データとを対応付けてデータベース化し、RAM2bに記憶保持する。端末制御部2は、端末1が操作されたときに、測位装置3が位置情報を得ることができない場合には、このデータベースに記憶保持されているGPS測位データを現在の端末1のGPS測位データとして代用することが可能になる。
(もっと読む)
ナビゲーション装置の経路探索方法
【課題】 刻々と変わる交通状況の性質を考慮した、精度の高いナビゲーション装置の処理を行う。
【解決手段】
ナビゲーション装置の記憶装置に、統計交通情報(過去に収集された交通情報より定まる旅行時間を含む統計データ)を記憶する。自身が保有する地図データのバージョン情報を交通情報配信センタに送信する。現在の交通情報より定まる旅行時間(移動速度)を含み、かつ地図データのバージョンに適合する現況交通情報を交通情報配信センタから入手する。旅行時間が不明なリンクの旅行時間を算出するために、未提供リンク補間情報も入手する。現況交通情報、未提供リンク補間情報、統計交通情報を用いて、経路探索を行う。経路探索は、イグニションON時に、自動的に行う。
(もっと読む)
経路探索方法、経路案内システム、ナビゲーション装置及び統計処理サーバ
【課題】推奨経路を的確に探索することができる経路探索方法、経路案内システム、ナビゲーション装置及び統計処理サーバを提供する。
【解決手段】ナビゲーション装置1は、車両が所定時間内に到達する距離範囲を、各メッシュ及び各時間帯に応じてそれぞれ予測したスライス幅データを記憶するスライス幅DB30を用いて、現在の自車位置を中心とした環状の各円形エリアを、現在時刻を基準として時系列的にそれぞれ設定する。また、各メッシュ毎且つ各時間帯毎の交通状況に基づいて、各リンクに対して生成された交通データを記憶する交通DB35を用いて各円形エリア内のリンクに対し、各円形エリアに対応する時間帯の交通データを用いて、現在の自車位置から目的地までの推奨経路を探索する。
(もっと読む)
地図評価装置および地図評価方法
【課題】ナビゲーション装置等で用いられる地図データの信頼度を評価する。
【解決手段】絶対位置検出手段により車両の絶対位置を検出し、検出された車両の絶対位置に基づき、地図データ記憶手段に記憶されている地図データの表す道路地図を基準とした車両の位置を取得し、車両の走行に伴い検出された車両の絶対位置を、車両の走行軌跡情報として、道路地図を基準とした車両の位置と関連づけて記憶し、記憶された走行軌跡情報と、道路地図を基準とした車両の位置とを比較し、車両の絶対位置を基準とした場合における地図データの誤差である地図データの信頼度を、地図信頼度として設定する。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
地図表示装置、方法およびプログラム
【課題】経路上の任意の地点から経路近傍に存在する所定の地点に立ち寄った場合の時間情報(所定地点までの到達時間、到達時間に当初の経路までの復帰時間を加算した往復時間、ロスタイムなど)を地図上に視認性良く表示することができる地図表示装置、方法およびプログラムを提供することを目的とする。
【解決手段】地図情報格納部の地図データを使って、第一出発地から目的地までの第一経路を探索する第一経路探索部と、第一経路上の少なくとも1つのノードを第二出発地とし、第二出発地のそれぞれから所定時間内に到達可能な複数の経由地を探索する第二経路探索部と、複数の経由地を繋ぐことにより第一経路上からの時間的な離れ具合を表す時間曲線を求める時間曲線算出部と、第一経路と時間曲線を前記地図データとともに表示する表示部とを有する。
(もっと読む)
位置算出装置の誤差円の決定方法
【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
車両用地図表示装置
【課題】地図データの容量を抑えつつ、多くの情報が含まれた道路画像を表示することができる車両用ナビゲーション装置を提供する。
【解決手段】車両が走行中の道路の路面上をカメラA7およびカメラB8によって撮影し、道路情報検出手段21では、撮影画像から車両が走行中の道路に関する道路情報(道路幅員、道路標示)を検出する。そして、道路画像表示制御手段24において、地図データ記憶器2に記憶されている道路データに基づいて作成した道路画像に、検出した道路情報に基づいて作成した路面表示画像を追加して、ディスプレイ3に表示する。これにより、地図データの容量を抑えつつ、多くの情報が含まれた道路画像を表示することができ、また、道路情報をユーザが入力する手間も軽減できる。
(もっと読む)
ナビゲーション装置
【課題】施設内の施設情報をただ表示するだけではなく、選択した施設の詳細情報を表示すると共に選択した施設に関連した情報を同時に表示することができるナビゲーション装置を提供する。
【解決手段】表示装置8に表示された市街地地図M上で施設Pを選択すると、その施設Pの複数の店舗を施設リストとして吹き出し表示Fで表示すると共に、表示された店舗の施設リストからジャンル(店舗)を設定することで、施設Pの周辺にある同じジャンルの施設を表示することができ、ナビゲーション装置において目的地を設定する際に複数の施設から選択して目的地として設定することができ、また、目的地に設定しようとした施設の周辺の類似した施設を表示して確認する。
(もっと読む)
経路探索装置
【課題】走行経験の有無に関わらず、生体情報を利用した快適な走行経路を提供可能な経路探索装置とする。
【解決手段】車両の走行中において運転者の生体情報(心拍等)を測定し、異常状態を検出した地点での環境情報(車両量、信号量等)を、個人特性データーベースに格納しておく。一方、経路探索を行う場合、経路探索用のコスト計算の際に、異常状態となった走行環境と同じ走行環境の道路や区間についてのコストを変更して計算を行う。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
経路探索装置
【課題】走行経験の有無に関わらず、生体情報を利用した快適な走行経路を探索する。
【解決手段】目的地まで経路探索した複数の走行経路上を走行している他車両のうち、自車両の運転者と同一の特性を持つ(生体異常となっている項目と、その環境項目が同一又は類似している場合)他車両の運転者が、現在どのような状態で運転しているかを、情報センタから取得する。他車両の状態としては、生体情報の異常項目の数と程度に応じたストレス度(ストレス大、ストレス小、ストレス無の3の状態)をその車両位置と共に取得する。そして、各経路に対して、その経路上の全車両数に対するストレス無の車両数の比率から快適指数Kを算出し、この快適指数Kの値に応じて快適度V2を決定する。
(もっと読む)
721 - 740 / 898
[ Back to top ]