
Fターム[2F129GG17]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援機器 (2,561) | 撮像機器 (2,058)
Fターム[2F129GG17]に分類される特許
441 - 460 / 2,058
測位装置、測位方法及びプログラム
【課題】電力の消費を抑制しつつ、目的の変化に対応して位置精度を向上させる。
【解決手段】GPS受信部14及びCPU10は、所定の測位条件の成立毎に位置情報の測位(GPS測位)を行う。そして、地図データベース24は、一以上の景勝地の位置情報を複数種類のカテゴリーの何れかに対応付けて記憶する。そして、CPU10は、地図データベース24に記憶された景勝地から何れかを設定する。そして、CPU10は、設定された景勝地の属するカテゴリーに対応する大きさの領域を景勝地に対応付けて設定する。そして、CPU10は、GPS測位により測位した位置情報が設定された領域に属しているか否かを判定する。そして、CPU10は、この判定結果に基づいてGPS測位の測位条件を変更する。
(もっと読む)
情報表示装置、情報表示装置の制御方法、およびプログラム

【課題】動作履歴を有する多種多様のコンテンツを地図上の行動の履歴より容易に再生させること。
【解決手段】動作部は、コンテンツに関する動作を実行する。動作履歴取得部は、動作部においてコンテンツに関する動作が実行されているときの位置情報および時刻情報を、動作中のコンテンツに対応付けてコンテンツ動作履歴として取得する。表示部10は、コンテンツ動作履歴取得部が取得した位置情報および時刻情報に基づいて地図情報上にコンテンツ動作履歴を、動作部によって動作が実行されたコンテンツの種類が判別可能なアイコンとして表示する。制御部16は、表示部10に表示されているアイコンに対して動作指示が行われた際には、アイコンに対応するコンテンツに関する動作を各部によって実行させる。
(もっと読む)
車載渋滞情報収集システム及び渋滞状況推定システム
【課題】現在の最新交通状況を反映した渋滞情報を即時に提供可能な車載渋滞情報収集システム及び渋滞状況推定システムを提供する。
【解決手段】本発明の車載渋滞情報収集システムは、車両に搭載されると共に車両の走行状況によって渋滞情報を収集する車載渋滞情報収集システムであって、所定区画における車両の平均車速を取得する平均車速取得手段(車速センサ210、ECU100)と、所定区画における道路種別に応じた渋滞判定速度を取得する渋滞判定速度取得手段(ECU100、渋滞判定速度データベース710)と、前記平均車速取得手段によって取得された平均車速と、前記渋滞判定速度取得手段によって取得された渋滞判定速度とを比較する第1比較手段(ECU100)と、前記第1比較手段による比較結果に基づき、所定区間が渋滞であるか否かを判定する判定手段(ECU100)と、前記判定手段による判定結果を送信する通信部500と、を有することを特徴とする。
(もっと読む)
案内装置、案内方法、及び案内プログラム
【課題】センサの検出範囲外から自車両に接近する他車両が存在する可能性を考慮した案内を行うことができる、案内装置、案内方法、及び案内プログラムを提供すること。
【解決手段】案内装置50は、自車両に搭載される案内装置50であって、検出範囲内の他車両を検出する他車両検出部51と、他車両検出部51によって他車両が検出されない場合に、検出範囲外に存在し、且つ対象車線に存在する仮想車両の車速を推定する車速推定部52aと、自車両の車速と車速推定部52aが推定した仮想車両の車速とに基づき、対象車線に関する案内情報を出力する出力部52bとを備える。
(もっと読む)
道路標示認識装置及び道路標示認識方法
【課題】走行している車線が特定車線か否かを正確かつ高速に判定することのできる「道路標示認識装置及び道路標示認識方法」を提供すること。
【解決手段】道路標示認識装置は、カメラと、カメラで撮影された画像を基に、車線マークを検出する車線マーク検出部と、カメラで撮影された画像を基に、特定の道路標示を検出する特定道路標示検出部と、自車両の走行距離を算出する走行距離算出部と、所定の距離を走行するまでに、自車両が走行する車線に特定の道路標示を検出したときに、自車両が特定の車線を走行していると判定する特定道路標示存在判定部と、を備える。車線マーク検出部は、自車両が走行している車線の右側の車線マーク及び左側の車線マークを特定し、特定道路標示存在判定部は、特定の道路標示の位置が右側の車線マークの位置と左側の車線マークの位置の間であるとき、自車両が特定の車線を走行していると判定する。
(もっと読む)
運転シーン判定装置、運転シーン判定方法およびプログラム、ならびに、ワークロード推定装置、ワークロード推定方法およびプログラム
【課題】 運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることのできる運転シーン判定装置を提供する。
【解決手段】 運転シーン判定装置1は、車両情報と道路情報に運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーンDB11と、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶する遷移可否DB12と、運転シーン対応情報および遷移可否情報に基づいて現在の車両情報および現在の道路情報から現在の運転シーンを判定する運転シーン判定部10を備えている。この運転シーン判定部10は、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定する。
(もっと読む)
可搬型ランドマークの配備システムおよび方法
【課題】位置確認およびナビゲーションのために視覚ランドマークを拠り所とする場合が多い移動ロボット・デバイスのための、ランドマーク・コントローラと、ランドマーク配備システムと、複数の可搬型ランドマークとを備えている装置を提供する。
【解決手段】ランドマーク・コントローラは、ランドマーク位置決めおよび配置プロセスを有する。ランドマーク配備システムは、複数の操作コンポーネントを有する。複数の可搬型ランドマークは、作業現場内にある複数の位置に配備されるように構成されている。
(もっと読む)
ナビゲーション装置、車載表示システム及び地図表示方法
【課題】実際の運転に即して走行上注意すべき位置を案内することができるナビゲーション装置を提供する。
【解決手段】ドライブレコーダは、車両に搭載されて事故などの所定のイベントの発生を検知し、そのイベントが発生した時点の車両の位置である「イベント発生位置」を記録する。ナビゲーション装置は、ドライブレコーダで記録された「イベント発生位置」を取得し、ディスプレイ13に表示する地図の範囲内に「イベント発生位置」があれば、その位置に警告マーク42を重畳する。これにより、実際にイベントが発生した位置が地図上に示されるため、実際の運転に即して走行上注意すべき位置を案内することができる。その結果、ユーザはその位置を意識した運転を行うことができ、安全性が向上する。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
防犯マップ作成方法、防犯マップ作成用データサーバ、及び防犯マップ作成用プログラム
【課題】地域住民の感覚、意識に合致したリアルタイムの情報を開示することのできる防犯マップ作成方法を提供する。
【解決手段】地域住民等が携帯する携帯端末10は、GPS受信部102からの信号より得られた位置情報信号や使用者の入力操作により入力された防犯に関する情報データやカメラ108のデータより送信用信号を生成し、送信する。携帯端末10より送信されたデータは、インターネット50を経由して、データサーバ30において受信され蓄積される。データサーバ30は、蓄積されたデータのうち、同じ地域内の同じ地点、同じ時間帯に関するデータを集計し、また、その地域全体の投票総数を集計して、その地域の地図に表示させた防犯マップを作成する。
(もっと読む)
環境モデリングに関する3D経路解析
領域内の経路解析を構築するための技法が提供される。領域内のモバイル装置からデータが受信される。データは、モバイル装置が通過する経路に基づく。次いで、通過可能な経路は、モバイル装置から受信されたデータから決定される。通過可能な経路は、マップ上に重畳されて、その通過可能な経路を含むそのマップは、要求している装置に配信または表示するためにパッケージ化される。 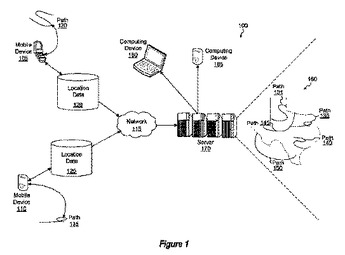 (もっと読む)
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
(もっと読む)
車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム
【課題】白線パターンの検出結果に基づいて車両の走行する道路の道路種別を正確な判定結果へと修正することを可能とした車両用走行案内装置、車両用走行案内方法及びコンピュータプログラムを提供する。
【解決手段】車両の現在位置と地図情報に基づいて車両の走行する道路の道路種別を判定するとともに、該判定により車両の走行する道路の道路種別が高速道路以外の道路であると判定されている状態においては、更にバックカメラを用いて車両の走行する道路に描かれた白線パターンを検出し(S12)、検出した白線パターンと白線パターン識別情報とに基づいて車両の走行する道路の道路種別を判定し(S12〜S20)、該判定により車両の走行する道路の道路種別が高速道路であると判定された場合には、車両の走行する道路種別を高速道路以外の道路から高速道路へと修正する(S21)ように構成する。
(もっと読む)
車両案内装置、車両案内方法、及び車両案内プログラム
【課題】車線の交通状況に応じて車線変更を容易とする案内を行うことができる、車両案内装置、車両案内方法、及び車両案内プログラムを提供すること。
【解決手段】車両案内装置10は、所定の車線における車間距離であって、車線変更の基準地点までに存在する車両3相互間の車間距離を特定する車間距離特定部12aと、特定した車間距離に基づき、基準地点に至るまでに所定の車線へ車線変更すべき推奨区間を特定する推奨区間特定部12bと、特定した推奨区間に基づいて所定の車線への車線変更に関する案内情報を出力する通信部11とを備える。
(もっと読む)
ナビゲーションシステム
【課題】本発明は、GPSなどの位置測定手段や地図サーバを用いることなく、携帯電話に代表される汎用端末に対して簡易に実装することが可能な汎用性の高いナビゲーションシステムを提供することを目的とする。
【解決手段】バーコードやICタグのような安価な記録媒体を案内空間の各所に配置する。記録媒体には、配置された位置から案内空間内に存在する全ての目的地に至るための進行方向を目的地毎に記録しておく。移動情報端末は、上記記録媒体から情報を読み取る度に、ユーザが選択した目的地に対応する進行方向を抽出してユーザに提示する。進行方向は、記録媒体から情報を読み取る際のユーザに対する相対方向として示され、ユーザは、自身が進むべき方向(絶対方向)を直感的に把握する。
(もっと読む)
映像処理装置
【課題】製造コストの増大を抑制しつつ、他の映像が表示不可能となった場合であっても安全性に関わるような特定の映像の表示を継続させることができる映像処理装置を提供すること。
【解決手段】所定のソフトウェアを実行することで外部および/または前段から入力される映像データに基づき生成した映像データを後段へ出力するデータ処理手段よりも後段に、外部から入力される特定の映像データおよび前段から入力される映像データに基づき、少なくとも特定の映像データを含む最終映像データを生成して所定の映像表示部へ出力する回路を接続して映像処理装置を構成した。
(もっと読む)
車載装置および認知支援システム
【課題】車載装置のコスト低減を図るとともに、ドライバーの死角から自車両に接近する移動物体の検出漏れを防止しつつ、検出した移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】歪曲した受光部により広角な範囲の映像を車載装置が撮像し、撮像された映像に基づいて撮像部の設置方向および設置方向以外の方向から自車両に接近する移動物体を車載装置が検出し、検出された移動物体と自車両とが衝突する可能性を示す衝突危険度を車載装置が判定し、判定された衝突危険度に応じて移動物体の存在を報知するように車載装置を構成する。
(もっと読む)
地図表示装置、地図表示方法、地図表示プログラムおよび記録媒体
【課題】地図データの表示領域の変更を迅速におこなうこと。
【解決手段】地図表示装置100の取得部101は、所定の領域の地図データを取得する。表示部102は、取得部101によって取得された地図データを表示する表示画面102a、表示画面102aに重ねられて設けられるタッチパネル102bを有する。検知部103は、表示部102に対する物体の接近および接触を検知する。取得部101は、地図データを表示している表示部102に対して物体の接近が検知された場合、表示部102に表示されている領域以外の地図データを取得する。表示部102は、物体の接触が検知された場合、物体の接近に伴って取得された領域の地図データを表示する。
(もっと読む)
車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム
【課題】案内情報を適切に案内対象地点に重畳させて表示することが可能となるとともに運転者に案内情報を視認させ易く表示することを可能とした車両用走行案内装置、車両用走行案内方法及びコンピュータプログラムを提供する。
【解決手段】ナビゲーション装置1に係る案内情報をHUD50により表示する場合に、車両に関する車両情報と車両の周辺環境をそれぞれ取得し、取得した車両情報と車両周辺環境とに基づいて、車両に所定値以上の制動力が継続的に発生することが予測される区間を、車両姿勢が基準姿勢に対して変位している状態が継続することが予測される区間として補正対象区間に設定し、設定された補正対象区間を車両が走行する間において、案内情報を表示する表示位置を、車両の制動力の発生に基づく車両姿勢の変位を考慮して補正するように構成する。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】無駄な消費エネルギーを的確に提示することが困難であった。
【解決手段】回生ブレーキによる制動および摩擦ブレーキによる制動を行うことが可能な車両において前記摩擦ブレーキによる制動が行われたことを特定し、前記車両の周囲の状況を示す情報を取得し、前記車両の周囲の状況に対応するために必要とされる必要制動力を特定し、前記必要制動力が前記回生ブレーキの最大制動力以下である状態で前記摩擦ブレーキによる制動が行われた場合に当該摩擦ブレーキによって消費されたエネルギーを特定し、当該消費されたエネルギーを示す情報を案内する。
(もっと読む)
441 - 460 / 2,058
[ Back to top ]